基于优化策略的车道保持控制方法和系统、设备及车辆与流程
本发明属于自动驾驶,尤其涉及一种基于优化策略的车道保持控制方法和系统、设备及车辆。
背景技术:
1、本发明涉及l2自动驾驶领域中的横向控制方向,目的是在于针对车载mcu算力差、实时性强的特点,设计一种基于优化策略的控制算法,保证车道保持时的稳定性与响应的快速性。在自动驾驶过程中,vdc控制器会根据车道线信息和当前车辆信息计算出对应的方向盘转角,发给eps控制器,实现在车辆在道线的居中保持行驶。当前,市场主流的控制手段是pid控制器,这种控制手段计算快速,算法简单,但是对于参数精度的要求较高,而且在通常情况下,车辆在不同条件的控制参数差异明显,需要根据对应工况配置对应的极点,调参麻烦,已经不能满足人们的要求,亟需得到改进。
技术实现思路
1、本发明的目的在于提供一种基于优化策略的车道保持控制方法和系统、设备及车辆,针对背景技术指出的问题,解决现有技术存在的缺陷。
2、本发明提供了下述方案:
3、第一方面,本技术提供了一种基于优化策略的车道保持控制方法,所述方法包括:
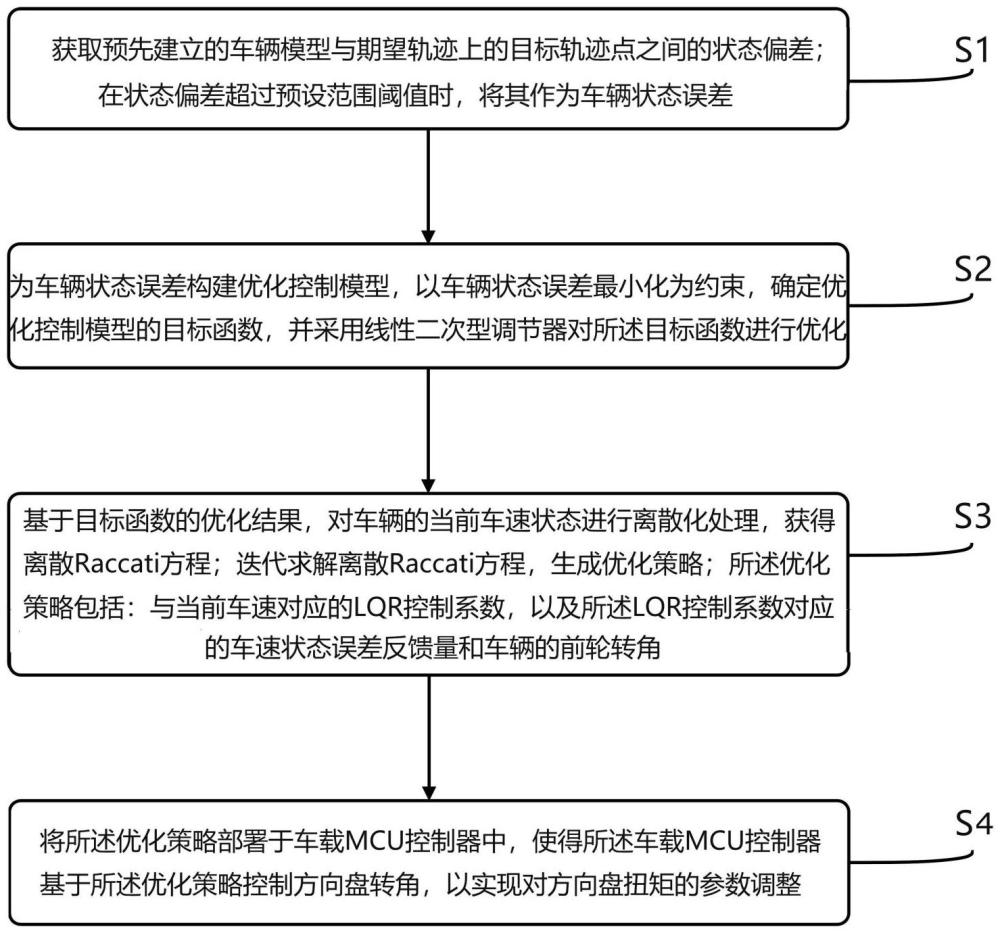
4、获取预先建立的车辆模型与期望轨迹上的目标轨迹点之间的状态偏差;在状态偏差超过预设范围阈值时,将其作为车辆状态误差;
5、为车辆状态误差构建优化控制模型,以车辆状态误差最小化为约束,确定优化控制模型的目标函数,并采用线性二次型调节器对所述目标函数进行优化;
6、基于目标函数的优化结果,对车辆的当前车速状态进行离散化处理,获得离散raccati方程;迭代求解离散raccati方程,生成优化策略;所述优化策略包括:与当前车速对应的lqr控制系数,以及所述lqr控制系数对应的车速状态误差反馈量和车辆的前轮转角;
7、将所述优化策略部署于车载mcu控制器中,使得所述车载mcu控制器基于所述优化策略控制方向盘转角,以实现对方向盘扭矩的参数调整。
8、可选的,所述预先建立的车辆模型,基于如下式的轮胎动力学方程计算获得:
9、
10、其中,y为车辆横向位置,为车辆横向速度,为车辆横向加速度,φ为车辆横摆角,为车辆横摆角速度,为车辆的横摆角加速度,caf和car分别为车辆前轮胎测偏系数和后轮胎测偏系数,m为整车质量,v为车辆速度,a为车辆前轮到质心点的轴长,b为车辆后轮到质心点的轴长,i为车辆转动惯量,δ为车辆前轮的转角。
11、可选的,通过下式确定所述车辆状态误差:
12、
13、其中,分别代表自车与在frenet坐标系下的参考道路线下的横向位置误差,横向速度误差,横向角度误差,横向角速度误差,为道路线角度的变化率,caf和car分别为车辆前轮胎测偏系数和后轮胎测偏系数,m为整车质量,v为车辆速度,a为前轮到质心点的轴长,b为后轮到质心点的轴长,i为车辆转动惯量。
14、可选的,将所述车辆状态误差转化为空间向量,建立优化控制模型,如下式:
15、
16、其中,err为误差状态量,a为误差状态量系数,b为车辆前轮转角系数,c为道路线角度变化率系数。
17、可选的,通过下式计算所述误差状态量系数:
18、
19、其中,caf和car分别为车辆前轮胎测偏系数和后轮胎测偏系数,m为整车质量,v为车辆速度,a为前轮到质心点的轴长,b为后轮到质心点的轴长,i为车辆转动惯量。
20、可选的,通过下式对所述目标函数进行优化:
21、
22、其中,j为目标函数,err为误差状态量,q为目标函数对于误差状态量的权重,r为输入权重,δ为车辆前轮的转角。
23、可选的,所述迭代求解raccati方程,生成优化策略包括:
24、通过查询离散表确定raccati方程是否迭代到最大次数,若迭代到最大次数,则输出当前车速下的lqr控制系数,否则读取离散表中对应车速段中间变量协方差矩阵;基于所述中间变量协方差矩阵进行raccati方程迭代;
25、当检测到当前raccati方程迭代到最大次数,更新离散表当前速度段的lqr控制系数,否则,更新离散表当前速度段中间变量协方差矩阵,输出迭代成功且距离当前车速最相近速度的lqr控制系数,以及lqr控制系数对应的车速状态误差反馈量和车辆的前轮转角。
26、第二方面,本技术提供了一种基于优化策略的车道保持控制系统,包括:
27、状态误差获取模块,用于获取预先建立的车辆模型与期望轨迹上的目标轨迹点之间的状态偏差;在状态偏差超过预设范围阈值时,将其作为车辆状态误差;
28、目标确定模块,用于为车辆状态误差构建优化控制模型,以车辆状态误差最小化为约束,确定优化控制模型的目标函数,并采用线性二次型调节器对所述目标函数进行优化;
29、迭代优化模块,用于基于目标函数的优化结果,对车辆的当前车速状态进行离散化处理,获得离散raccati方程;迭代求解离散raccati方程,生成优化策略;所述优化策略包括:与当前车速对应的lqr控制系数,以及所述lqr控制系数对应的车速状态误差反馈量和车辆的前轮转角;
30、控制模块,用于将所述优化策略部署于车载mcu控制器中,使得所述车载mcu控制器基于所述优化策略控制方向盘转角,以实现对方向盘扭矩的参数调整。
31、第三方面,本技术提供了一种电子设备,包括:处理器、通信接口、存储器和总线;其中,处理器,通信接口,存储器通过总线完成相互间的通信;所述存储器中存储有计算机程序,当所述计算机程序被所述处理器执行时,使得所述处理器执行第一方面中任一项所述方法的步骤。
32、第三方面,本技术提供了一种车辆,包括:
33、电子设备,用于实现第一方面中任一项所述方法的步骤;
34、处理器,处理器运行程序,当程序运行时从电子设备输出的数据执行第一方面中任一项所述方法的步骤;
35、存储介质,用于存储程序,程序在运行时对于从电子设备输出的数据执行第一方面中任一项所述方法的步骤。
36、本发明与现有技术相比具有以下的优点:
37、本发明首先根据车辆参数对轮胎动力学方程进行建模,获得目标车型的车辆模型,省去了传统pid方法需要根据不同工况进行极点配置的繁琐步骤。
38、其次,为了优化计算流程,达到实时优化计算的目的。本发明针对车载mcu算力较低的问题,对预先建立的车辆模型与期望轨迹上的目标轨迹点之间的状态偏差,定义车辆状态误差,以车辆状态误差最小化为约束确定优化控制模型的目标函数,同时根据线性二次型优化控制理论,采用线性二次型调节器对所述目标函数进行优化;基于目标函数的优化结果,对车辆的当前车速状态进行离散化处理,获得离散raccati方程;迭代求解离散raccati方程,生成优化策略;该优化策略包括与当前车速对应的lqr控制系数,以及lqr控制系数对应的车速状态误差反馈量和车辆的前轮转角。
39、最后,本发明方案通过变量离散,迭代优化,查询表格的方式将制定的优化策略可应用于车载mcu控制器中,使得车载mcu控制器基于优化策略控制方向盘转角,以实现对方向盘扭矩的参数调整。从而提高车辆保持时的快速响应性能和稳定性。
40、与传统pid算法进行对比,本发明提高了车辆响应的快速性,同时减少了传统算法的小幅度抖动,提升车辆在车道保持过程中的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!