一种基于离合器踏板的行车状态可视化预测系统的制作方法
本发明涉及行车状态预测,具体是指一种基于离合器踏板的行车状态可视化预测系统。
背景技术:
1、离合器踏板是手动挡汽车中控制动力传递的关键部件,除驾驶员疲劳程度和驾驶意图外,踏板状态也是影响行车状态的主要因素,基于离合器踏板的行车状态可视化预测系统是指采用机器学习技术对行车状态进行预测的系统。
2、在目前已有的近似方案中,例如,cn107742193b一种基于时变状态转移概率马尔可夫链的行车风险预测方法,这种方案针对传统马尔可夫链模型应用中基于转移频率的状态转移概率估算方法存在缺陷的技术问题,使用车辆间数据、驾驶员方向盘数据和驾驶员注意力状况等输入数据,采用马尔可夫链,建立不同行车风险状态下的行车风险状态转移多项回归模型,预测汽车未来行驶风险,实现了马尔可夫链n步时变状态转移概率的估计,反映了行车风险状态转移概率随交通系统特征变化而变化的特征,满足了预警实时性要求的技术效果,但存在因驾驶员行为最终通过换挡手柄和离合器踏板等机械结构传导至行车状态,因此直接依靠驾驶员行为特征是不够精准的,缺乏把握驾驶行为中存在的时间动态和捕捉长期依赖性的能力的技术问题;
3、此外,例如,cn115171412b车辆行驶状态的显示方法、系统及装置,这种方案针对可视化屏幕无法对车辆路侧信息进行实时展示,车辆状态显示结果不太准确的技术问题,这种方案通过将摄像头和路侧雷达进行融合确认道路障碍物,考虑红绿灯和道路异常事件,对行驶信息、地图信息和触达信息进行融合,可视化展示融合结果,实现了提高车辆状态显示结果准确度的技术效果,但存在未考虑源自于车内驾驶员行驶数据对车辆行驶状态带来的影响的技术问题。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供了一种基于离合器踏板的行车状态可视化预测系统,针对直接依靠驾驶员行为特征的现有方案是不够精准的,缺乏把握驾驶行为中存在的时间动态和捕捉长期依赖性的能力的技术问题,本方案创造性地提出一种变分模态分解降噪方法,采用结合软阈值的变分模态分解技术,对驾驶员置于踏板的位移深度和动作强度进行较为精确地度量,提高了行车状态预测的准确性;针对现有方案存在未考虑源自于车内驾驶员行驶数据对车辆行驶状态带来的影响的技术问题,本方案创造性地提出一种行车状态预测方法,考虑驾驶员的驾驶意图和踏板运动状态,采用结合图卷积的长短期记忆网络处理连续时间序列数据,通过可视化地方式辅助驾驶员驾驶,有效提高了车辆通行效率、通行安全性和行车状态的预测精度,辅助推动智能交通的发展。
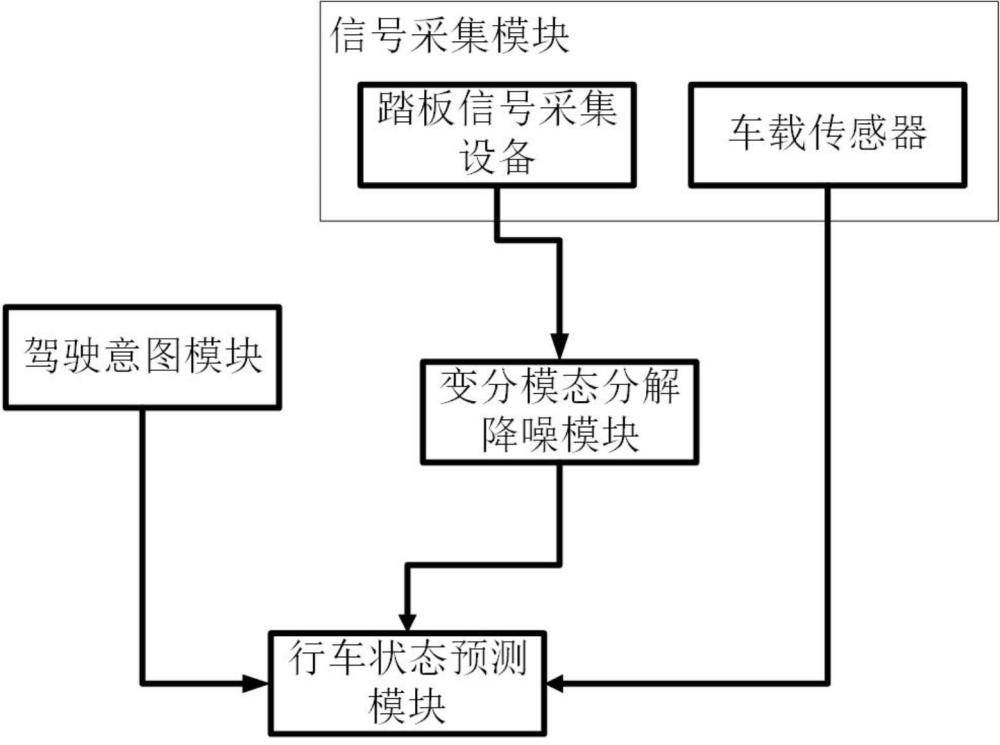
2、本发明采取的技术方案如下:本发明提供了一种基于离合器踏板的行车状态可视化预测系统,所述一种基于离合器踏板的行车状态可视化预测系统包括信号采集模块、变分模态分解降噪模块、驾驶意图模块和行车状态预测模块;
3、所述信号采集模块,包括踏板信号采集设备和车载传感器;所述踏板信号采集设备分别收集离合器踏板、制动踏板和油门踏板发出的电信号,所述电信号用于表征踏板的位移和踩踏强度;所述车载传感器,用于采集以时间序列形式保存的车载传感器数据;
4、所述变分模态分解降噪模块,采用变分模态分解降噪方法对电信号进行降噪处理;
5、所述驾驶意图模块,采用隐马尔可夫模型,识别驾驶员的驾驶意图;
6、所述行车状态预测模块,采用行车状态预测方法,接收并处理降噪后的电信号、车载传感器数据和驾驶意图,输出行车状态预测数据并将其可视化。
7、所述变分模态分解降噪模块采用变分模态分解降噪方法,所述变分模态分解降噪方法,具体操作如下:
8、步骤s1:信号分解,具体为,对电信号进行滤波处理,将滤波处理后的电信号使用变分模态分解技术分解成多个子信号;
9、步骤s2:优化子信号,具体为,将子信号通过希尔伯特变换转换到频率域解析信号,对频率域解析信号的频谱求导,得到信号梯度,以所有子信号的总和必须等于电信号作为约束条件,最小化所有子信号的信号梯度的欧几里得范数,将最小化任务记为约束优化问题,采用指数拉格朗日乘数将约束优化问题转换为非约束优化问题,使用交替方向乘子法对非约束优化问题进行求解,得到优化后子信号的频率域表示和中心频率;
10、步骤s3:降噪处理,具体为,对子信号进行降噪,所用公式如下:
11、;
12、;
13、式中,表示区分阈值,表示子信号的噪声水平,表示信号的长度,表示降噪后的子信号,表示符号函数,表示子信号;
14、步骤s4:信号重建,具体为,根据频率域表示和中心频率,将子信号重新组合,得到降噪后的电信号。
15、所述行车状态预测模块,采用行车状态预测方法,所述行车状态预测方法,具体操作如下:
16、步骤m1:曲线绘制,具体为,计算加速度阈值,根据降噪后的电信号,建立一个以速度和加速度为轴向的二维坐标平面,所用加速度阈值计算公式如下:
17、;
18、式中,表示加速度阈值,表示加速度缩放因子,表示瞬时行驶速度,、和表示经验拟合参数;
19、步骤m2:安全驾驶分区,具体为,根据加速度阈值绘制加速度阈值曲线,将所述二维坐标平面分为安全区和不安全区;
20、步骤m3:构建传感器关系图,具体为,根据车载传感器数据,在所有车载传感器中,量化每两个车载传感器之间的线性相关性,构建传感器加权邻接矩阵,所用传感器加权邻接矩阵计算公式如下:
21、;
22、式中,表示传感器加权邻接矩阵中坐标为的边权重,表示线性相关数,表示第个车载传感器数据,表示第个车载传感器数据,表示协方差,和分别表示和的标准差;
23、步骤m4:参数化,用于降低计算复杂度和提高图卷积操作效率,具体为,采用图卷积滤波器,通过切比雪夫多项式将图卷积滤波器参数化,所用公式如下:
24、;
25、式中,表示特征值对角矩阵,表示直接在图的频域中操作的作用于拉普拉斯矩阵的特征值对角矩阵的图卷积滤波器,表示归一化的特征值对角矩阵,表示第k阶切比雪夫多项式,表示切比雪夫多项式的可学习参数,表示多项式的总阶数,k表示阶数下标索引;
26、步骤m5:图卷积,用于采用图卷积操作提取空间特征,具体为,以车载传感器作为节点,以车载传感器之间的关系作为边,将节点、边和传感器加权邻接矩阵构建加权图,将所述加权图和二维坐标平面作为输入图信号,通过参数化后的图卷积滤波器绕过特征分解,直接在节点域中进行图卷积操作,得到空间特征,所用公式如下:
27、;
28、式中,表示图卷积结果,即空间特征,表示输入图信号,是直接在图的节点域中操作的作用于拉普拉斯矩阵的图卷积滤波器,表示拉普拉斯矩阵;
29、步骤m6:采用长短期记忆网络,将所述空间特征和所述驾驶意图输入到长短期记忆网络中进行时间序列预测,输出行车状态预测数据;
30、步骤m7:将所述行车状态预测数据通过屏幕进行可视化呈现。
31、采用上述方案本发明取得的有益效果如下:
32、(1)针对上述情况,为克服现有技术的缺陷,本发明提供了一种基于离合器踏板的行车状态可视化预测系统,针对直接依靠驾驶员行为特征的现有方案是不够精准的,缺乏把握驾驶行为中存在的时间动态和捕捉长期依赖性的能力的技术问题,本方案创造性地提出一种变分模态分解降噪方法,采用结合软阈值的变分模态分解技术,对驾驶员置于踏板的位移深度和动作强度进行较为精确地度量,提高了行车状态预测的准确性;
33、(2)针对现有方案存在未考虑源自于车内驾驶员行驶数据对车辆行驶状态带来的影响的技术问题,本方案创造性地提出一种行车状态预测方法,考虑驾驶员的驾驶意图和踏板运动状态,采用结合图卷积的长短期记忆网络处理连续时间序列数据,通过可视化地方式辅助驾驶员驾驶,有效提高了车辆通行效率、通行安全性和行车状态的预测精度,辅助推动智能交通的发展。
- 还没有人留言评论。精彩留言会获得点赞!