一种车辆驾驶控制方法、装置、电子设备及存储介质与流程
本技术实施例涉及智能驾驶,尤其涉及一种车辆驾驶控制方法、装置、电子设备及存储介质。
背景技术:
1、目前感知环境模型、车道模型和语义信息的建立主要采用以下两种方法:基于多项式回归的车道线拟合方法和基于关键点的车道线检测方法。其中,基于多项式回归的车道线拟合方法通过拟合车道线上的点到多项式曲线,来构建车道模型;基于关键点的车道线检测方法则侧重于识别车道线上的关键特征点来构建车道线模型。然而,上述两种方法均未充分考虑定位抖动及障碍物等噪点因素对车道模型建立的影响。同时,相关技术在处理障碍物与目标车辆的冲突关系时,缺乏有效的整合机制,未能将障碍物的预测行为和其相对于目标车辆的路权关系融入车道语义信息中,从而会降低最终输出的车道模型和语义信息结果的准确性,影响下游模块决策判断的准确性,进而影响智能驾驶车辆和系统的安全性。
技术实现思路
1、本技术实施例提供一种车辆驾驶控制方法、装置、电子设备及存储介质,旨在改善相关技术中提供的车辆驾驶控制方法存在的准确性和稳定性低的技术问题。
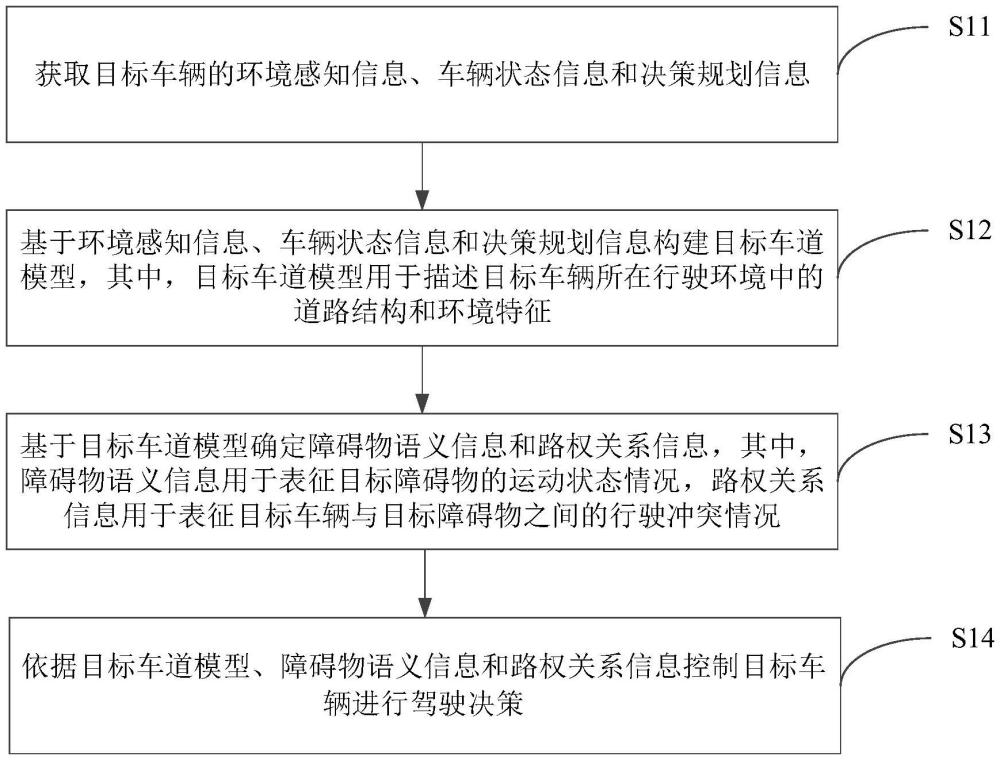
2、根据本技术其中一实施例,提供了一种车辆驾驶控制方法,包括:获取目标车辆的环境感知信息、车辆状态信息和决策规划信息;基于环境感知信息、车辆状态信息和决策规划信息构建目标车道模型,其中,目标车道模型用于描述目标车辆所在行驶环境中的道路结构和环境特征;基于目标车道模型确定障碍物语义信息和路权关系信息,其中,障碍物语义信息用于表征目标障碍物的运动状态情况,路权关系信息用于表征目标车辆与目标障碍物之间的行驶冲突情况;依据目标车道模型、障碍物语义信息和路权关系信息控制目标车辆进行驾驶决策。
3、本技术的上述可选实施例能够实现如下有益效果:首先,获取目标车辆的环境感知信息、车辆状态信息和决策规划信息,并基于上述信息构建目标车道模型;进而基于目标车道模型确定障碍物语义信息和路权关系信息;最后,依据目标车道模型、障碍物语义信息和路权关系信息控制目标车辆进行驾驶决策,达到了完善车辆驾驶控制系统的环境模型,增强驾驶决策依据的准确性与全面性的目的,从而实现了提高车辆驾驶控制的准确性和稳定性的技术效果,进而解决了相关技术中提供的车辆驾驶控制方法存在的准确性和稳定性低的技术问题。
4、可选地,基于环境感知信息、车辆状态信息和决策规划信息构建目标车道模型包括:对环境感知信息、车辆状态信息和决策规划信息进行时间同步处理,得到时间同步结果;对时间同步结果进行组合处理,得到车道列表组合;对车道列表组合进行转换处理,得到初始车道模型;对初始车道模型进行校正处理,得到目标车道模型。
5、本技术的上述可选实施例能够实现如下有益效果:通过时间同步处理,可消除不同传感器和模块间数据的时间偏移,保证环境感知信息、车辆状态信息和决策规划信息的同步性;将时间同步后的信息组合,形成车道列表组合,则为后续建模提供了完整的车道信息框架;进一步地,通过对车道列表组合的转换处理,将抽象的车道信息转化为可视化的车道模型,初步建立了车辆行驶环境的数字化表示;最后,通过校正处理,能够构建一个精确反映车辆行驶环境的目标车道模型,确保自动驾驶车辆在执行变道、避障等动作时,能够基于准确、实时的环境信息做出决策,从而提高车辆行驶的安全性和驾驶体验的流畅性。
6、可选地,对初始车道模型进行校正处理,得到目标车道模型包括:基于初始车道模型获取历史规划车道信息和当前检测车道信息,其中,历史规划车道信息包括:历史数据帧对应的参考车道列表和目标车道列表,参考车道列表中的参考车道用于表征历史决策时刻下的决策行驶车道,目标车道列表中的目标车道用于表征历史决策时刻下的期望行驶车道,当前检测车道信息包括:当前数据帧对应的当前车道;利用历史规划车道信息和当前检测车道信息进行匹配处理,得到车道匹配结果,其中,车道匹配结果用于确定目标车辆是否发生横向行为;响应基于车道匹配结果确定历史规划车道信息与当前检测车道信息不一致,对初始车道模型中的当前检测车道信息进行校正处理,得到目标车道模型。
7、本技术的上述可选实施例能够实现如下有益效果:通过实时分析历史规划车道信息和当前检测车道信息之间的差异,能够及时识别并校正目标车辆在行驶过程中可能发生的横向行为偏差,确保车道模型与车辆实际行驶状态的匹配,从而提高车辆驾驶控制系统环境模型的准确性与实时性。
8、可选地,对初始车道模型中的当前检测车道信息进行校正处理,得到目标车道模型包括:获取目标车辆与目标车道之间的横向距离;响应于横向距离小于预设距离,将初始车道模型中的当前车道校正为目标车道,得到目标车道模型,其中,预设距离根据目标车道的车道宽度而确定。
9、本技术的上述可选实施例能够实现如下有益效果:通过实时监测并计算目标车辆与目标车道中心线的横向距离,并与预设距离进行比较,能够及时识别目标车辆是否已经成功过渡至目标车道,确保车辆驾驶控制系统能够根据车辆的实际行驶状态动态调整车道模型,避免因定位误差或系统噪声导致的不必要车道信息校正或换道操作,从而提高了车道模型的准确性和系统响应的实时性。
10、可选地,基于目标车道模型确定障碍物语义信息和路权关系信息包括:基于环境感知信息获取目标障碍物对应的障碍物路径信息和障碍物预测信息;基于障碍物路径信息和障碍物预测信息将目标障碍物投影至目标车道模型,得到障碍物语义信息;依据障碍物语义信息确定行驶冲突类型,其中,行驶冲突类型包括以下至少之一:车道保持类型、汇入类型、切入类型、交叉冲突类型;基于行驶冲突类型确定路权关系信息。
11、本技术的上述可选实施例能够实现如下有益效果:通过综合分析环境感知信息、障碍物路径信息、障碍物预测信息与目标车道模型,能够构建出实时且详尽的障碍物语义信息,进而准确判定目标车辆与障碍物之间的行驶冲突类型,确保车辆驾驶控制系统不仅能够即时识别周围环境中的障碍物,还能根据障碍物不同的行驶冲突类型确定路权关系信息,从而为后续决策提供关键依据。
12、可选地,依据障碍物语义信息确定行驶冲突类型包括:获取障碍物车道序列和参考线车道序列;依据障碍物语义信息确定目标障碍物对应的障碍物当前车道;响应于障碍物车道序列和参考线车道序列之间存在重合,并且障碍物当前车道属于参考线车道序列,确定行驶冲突类型为车道保持类型。
13、本技术的上述可选实施例能够实现如下有益效果:当障碍物车道序列和参考线车道序列之间存在重合,并且障碍物当前车道属于参考线车道序列,可以确定行驶冲突类型为车道保持类型。通过实时对比目标车辆的障碍物车道序列与参考线车道序列,能够准确识别和判定车辆与障碍物之间的冲突类型,从而提高整体驾驶安全性和效率。
14、可选地,车辆驾驶控制方法还包括:响应于障碍物车道序列和参考线车道序列之间不存在重合,并且目标车辆和目标障碍物满足预设位置条件,可以确定行驶冲突类型为交叉冲突类型。
15、本技术的上述可选实施例能够实现如下有益效果:通过实时分析和预测目标车辆与障碍物未来交汇的可能性,能够在障碍物车道序列和参考线车道序列未重合的条件下,准确判定两者之间的行驶冲突类型是否为交叉冲突类型,使得车辆驾驶控制系统能够在复杂道路环境中,如交叉路口、多车道交汇等场景,提前识别并处理潜在的交叉冲突,从而能够采取更加及时有效的避让或调整措施,避免碰撞风险,确保行车安全和道路通行效率。
16、可选地,依据障碍物语义信息确定行驶冲突类型包括:获取障碍物车道序列、参考线车道序列和驾驶行为预测结果;依据障碍物语义信息确定目标障碍物对应的障碍物当前车道;响应于障碍物车道序列和参考线车道序列之间存在重合,并且障碍物当前车道不属于参考线车道序列,基于重合车道类型和驾驶行为预测结果确定行驶冲突类型。
17、本技术的上述可选实施例能够实现如下有益效果:通过实时分析目标车辆与障碍物的相对位置、目标车辆的驾驶行为预测结果以及参考线车道序列与障碍物车道序列之间的重合车道类型,能够更精确地识别和判定行驶冲突类型,从而为车辆驾驶控制系统提供关键决策依据,确保车辆在复杂道路条件下的安全行驶。
18、可选地,重合车道类型和驾驶行为预测结果确定行驶冲突类型包括:若基于驾驶行为预测结果确定目标车辆执行换道行为,确定行驶冲突类型为切入类型;若基于驾驶行为预测结果确定目标车辆执行循迹行为,并且重合车道类型为前向车道,确定行驶冲突类型为汇入类型;若基于驾驶行为预测结果确定目标车辆执行循迹行为,并且重合车道类型为后向车道,确定行驶冲突类型为车道保持类型。
19、本技术的上述可选实施例能够实现如下有益效果:通过实时分析目标车辆的驾驶行为预测结果和障碍物的相对位置,结合车辆规划的车道序列与障碍物所在车道的重合类型,车辆驾驶控制系统能够精确地识别和分类行驶冲突类型,包括换道行为引发的“切入类型”冲突、循迹行为中前方障碍物引起的“汇入类型”冲突,以及后方障碍物接近时的“车道保持类型”冲突,不仅能够确保目标车辆在复杂道路条件下的安全行驶,还能够为车辆驾驶控制系统提供关键的决策依据,以调整车辆的行驶策略,如适时的变道、减速或加速,来避免碰撞风险,保障行车安全。
20、可选地,基于行驶冲突类型确定路权关系信息包括:获取目标障碍物的障碍物类型;基于行驶冲突类型、障碍物类型和预设路权规则确定路权关系信息。
21、本技术的上述可选实施例能够实现如下有益效果:通过实时监测目标障碍物的类型及其与目标车辆之间的行驶冲突类型,结合预设的路权规则,车辆驾驶控制系统能够动态地确定路权关系信息,确保智能驾驶车辆在各种交通场景下都能安全通行。
22、根据本技术其中一实施例,还提供了一种车辆驾驶控制装置,包括:获取模块,用于获取目标车辆的环境感知信息、车辆状态信息和决策规划信息;构建模块,用于基于环境感知信息、车辆状态信息和决策规划信息构建目标车道模型,其中,目标车道模型用于描述目标车辆所在行驶环境中的道路结构和环境特征;确定模块,用于基于目标车道模型确定障碍物语义信息和路权关系信息,其中,障碍物语义信息用于表征目标障碍物的运动状态情况,路权关系信息用于表征目标车辆与目标障碍物之间的行驶冲突情况;控制模块,用于依据目标车道模型、障碍物语义信息和路权关系信息控制目标车辆进行驾驶决策。
23、可选地,构建模块还用于:对环境感知信息、车辆状态信息和决策规划信息进行时间同步处理,得到时间同步结果;对时间同步结果进行组合处理,得到车道列表组合;对车道列表组合进行转换处理,得到初始车道模型;对初始车道模型进行校正处理,得到目标车道模型。
24、可选地,构建模块还用于:基于初始车道模型获取历史规划车道信息和当前检测车道信息,其中,历史规划车道信息包括:历史数据帧对应的参考车道列表和目标车道列表,参考车道列表中的参考车道用于表征历史决策时刻下的决策行驶车道,目标车道列表中的目标车道用于表征历史决策时刻下的期望行驶车道,当前检测车道信息包括:当前数据帧对应的当前车道;利用历史规划车道信息和当前检测车道信息进行匹配处理,得到车道匹配结果,其中,车道匹配结果用于确定目标车辆是否发生横向行为;响应基于车道匹配结果确定历史规划车道信息与当前检测车道信息不一致,对初始车道模型中的当前检测车道信息进行校正处理,得到目标车道模型。
25、可选地,构建模块还用于:获取目标车辆与目标车道之间的横向距离;响应于横向距离小于预设距离,将初始车道模型中的当前车道校正为目标车道,得到目标车道模型,其中,预设距离根据目标车道的车道宽度而确定。
26、可选地,确定模块还用于:基于环境感知信息获取目标障碍物对应的障碍物路径信息和障碍物预测信息;基于障碍物路径信息和障碍物预测信息将目标障碍物投影至目标车道模型,得到障碍物语义信息;依据障碍物语义信息确定行驶冲突类型,其中,行驶冲突类型包括以下至少之一:车道保持类型、汇入类型、切入类型、交叉冲突类型;基于行驶冲突类型确定路权关系信息。
27、可选地,确定模块还用于:获取障碍物车道序列和参考线车道序列;依据障碍物语义信息确定目标障碍物对应的障碍物当前车道;响应于障碍物车道序列和参考线车道序列之间存在重合,并且障碍物当前车道属于参考线车道序列,确定行驶冲突类型为车道保持类型。
28、可选地,确定模块还用于:响应于障碍物车道序列和参考线车道序列之间不存在重合,并且目标车辆和目标障碍物满足预设位置条件,确定行驶冲突类型为交叉冲突类型。
29、可选地,确定模块还用于:获取障碍物车道序列、参考线车道序列和驾驶行为预测结果;依据障碍物语义信息确定目标障碍物对应的障碍物当前车道;响应于障碍物车道序列和参考线车道序列之间存在重合,并且障碍物当前车道不属于参考线车道序列,基于重合车道类型和驾驶行为预测结果确定行驶冲突类型。
30、可选地,确定模块还用于:若基于驾驶行为预测结果确定目标车辆执行换道行为,确定行驶冲突类型为切入类型;若基于驾驶行为预测结果确定目标车辆执行循迹行为,并且重合车道类型为前向车道,确定行驶冲突类型为汇入类型;若基于驾驶行为预测结果确定目标车辆执行循迹行为,并且重合车道类型为后向车道,确定行驶冲突类型为车道保持类型。
31、可选地,确定模块还用于:获取目标障碍物的障碍物类型;基于行驶冲突类型、障碍物类型和预设路权规则确定路权关系信息。
32、根据本技术实施例的另一个方面,提供了一种电子设备,包括处理器和存储器,其中,存储器,用于存放计算机程序;处理器,用于执行存储器上所存放的程序,实现上述的车辆驾驶控制方法。
33、根据本技术实施例的另一个方面,提供了一种计算机可读存储介质,计算机可读存储介质内存储有计算机程序,计算机程序被处理器执行时实现上述的车辆驾驶控制方法。
- 还没有人留言评论。精彩留言会获得点赞!