用于在由牵引车辆和拖车组成的挂车组合的调度操作情况下进行辅助的方法、系统和挂车组合与流程
[0001]
本发明涉及一种用于在由牵引车辆和拖车组成的挂车组合的调度操作情况下进行辅助的方法、系统和挂车组合。
背景技术:
[0002]
典型地配备有3至6个摄像机的、用于泊车操作辅助的环视系统可以提供足够的全方位视野并且尤其允许车辆相对于停车线定向。成本更低的基于倒车摄像机的泊车操作辅助系统仅提供车辆后方的视野并且不提供相对于图像中的静态结构定位的可能性。尤其,在此,停车位的平行停车线在泊车操作结束时不再能被看到。
[0003]
us 2016/207459 a1和wo2016/0822961 a1分别说明了一种方法,其中,将倒车摄像机之前拍摄的图像投影到倒车摄像机的当前在以图形示出的视野范围以外的图像区域中。
[0004]
ep 2 921 350 a2公开了一种拖车的基于视频的(部分)自主耦合和解耦。
[0005]
de 10 2009 012 253 a1说明了一种用于利用在拖车上的倒车摄像机来实施挂车组合的泊车操作的方法。
技术实现要素:
[0006]
根据第一方面,本发明涉及一种用于在由牵引车辆和拖车组成的挂车组合的调度操作情况下进行辅助的方法。在此,“牵引车辆”尤其可以考虑能牵引拖车并且尤其能自由操作并且能借助马达式驱动装置来行驶并且控制的任何车辆,例如,载客车和/或载重车和/或拖拉机。“拖车”尤其是在与牵引车辆连接的情况下能操作的任何车辆。在此,尤其考虑房车和/或马车和/或其他拖车。相应地,挂车组合是由拖车和牵引车辆组成的挂车组合。术语“调度操作”尤其指确定的行驶运动,尤其是在低于6公里/小时的速度的情况下以挂车组合的形式例如在装载位置或卸载位置引导载重车拖车和/或在停车位窄的情况下反复尝试下泊入载客车。在根据本发明的方法的第一步骤中,通过牵引车辆的倒车摄像机来感测静止的对象,例如地面标记、尤其是停车线。附加地,也可以利用牵引车辆的前置摄像机来感测该对象或周围环境。在下一个步骤中求取,拖车对于倒车摄像机来说遮挡了该对象。这尤其可以借助于向前运动器件的分析评价单元,例如cpu和/或微控制器和/或电子控制单元,例如车载主机(head unit)来实现。这种遮挡可以根据对由倒车摄像机的视频输入信号所生成的图像的分析来求取。在此,对于分析而言尤其考虑对由倒车摄像机的视频信号产生的图像进行图像特征分析和/或亮度分布分析和/或颜色分析。遮挡可以包括:倒车摄像机到对象上的视野在空间上被拖车挡住,和/或,拖车到对象上的阴影投射。在进一步的步骤中,在借助倒车摄像机求取的图像中,拖车的成像被代表被遮挡的对象的图像元素叠加,例如被停车线的图示叠加。换句话说,为了辅助调度操作,对于倒车摄像机来说不再可见的对象作为图形表示投影到拖车的成像上,从而该对象对于用户来说仍保持可见。由倒车摄
像机求取的图像的图形表示例如可以在组合显示器和/或中央信息显示器和/或平视显示器上进行。因此,根据本发明的方法能够实现一种成本低的单相机系统,该单相机系统用于在“调度操作内关于地点固定的周围环境结构来定向挂车组合”方面辅助该操作。在此,省去在拖车上设置附加摄像机的必要性。
[0007]
从属权利要求示出本发明的优选扩展方案。
[0008]
在一个优选的扩展方案中,根据本发明的方法包括产生俯视图像的步骤,其中,在图像中通过倒车摄像机的被拖车遮挡的视野的成像来叠加来自在调度操作之前和/或调度操作期间由倒车摄像机拍摄的周围环境拍摄内容的俯视图像。在根据本发明的方法的这个步骤中,尤其,例如在启动和/或经过调度区域时由倒车摄像机所拍摄的周围环境拍摄内容被添加到显示器的俯视图像中。尤其,因此在图像中与倒车摄像机的被拖车遮挡的视野的成像相应的图形区域可以由之前的周围环境拍摄内容逼真地表示。这使得用户可以更简单地调度挂车组合。附加地或者替代地,在调度操作之前和/或在调度操作期间由倒车摄像机所拍摄的图像或周围环境拍摄内容尤其以运动补偿的方式通过对图像的不可见区域进行可视化来叠加。周围环境拍摄内容尤其可以在向前驶向调度操作区域期间被拍摄。
[0009]
在根据本发明的方法的另一有利构型中,图像元素附加地代表拖车的轨迹的图形表示。这尤其可以以测距法方式借助于求取牵引车辆的转向角来实现。图形表示例如可以具有直线和/或曲线。
[0010]
在另一有利的构型中,根据本发明的方法还包括,用后视镜备用摄像机感测拖车的步骤和求取拖车在由倒车摄像机所求取的图像中的成像位置的步骤。换句话说,尤其可以考虑在调度操作期间拖车的运动。响应于此例如可以在调度过程期间更新拖车在由倒车摄像机所求取的图像上的位置。尤其,在拖车不再遮挡对象的情况下可以将图像元素隐没。这可以减少用户方面的分心程度并且节省计算能力。
[0011]
在根据本发明的方法的另一有利构型中,对象包括停泊的其它车辆和/或地面标记,尤其是停车线和/或车道带,和/或是植物和/或建筑物,和/或是交通标志牌,和/或设施、例如消防栓,和/或是交通标志牌,和/或是道路结构、例如路缘,和/或是井盖。在待感测的对象类型方面的预给定可以在工厂方面已被预先限定,或者可以由用户来设定。此外,在此可以通过倒车摄像机感测多个对象并且在被拖车遮挡的情况下可以作为图像元素在由倒车摄像机示出的图像上被叠加到拖车的成像上。此外,可以在图像上对对象、例如车道带进行尤其线性的外推法。尤其,在对象本身运动的情况下,例如当停放的车辆启动时,该车辆在遮挡的情况下可以被分类为“不安全”或“非地点固定的”,因此例如可以视觉地和/或听觉地和/或触觉地向用户输出警告。因此,可以提高在调度操作期间的安全性。
[0012]
此外有利地,图像元素可以根据转向角和/或车辆速度和/或加速度来示出。为此,尤其能想到已知的测距法。
[0013]
在本发明第一方面的另一有利构型中,根据本发明的用于辅助的方法可以通过低于预先限定的速度,例如6公里/小时,和/或通过用户输入来触发。因此,在特别有问题的调度操作的情况下,用户可以及早地安排通过倒车摄像机对周围环境拍摄,从而在调度操作期间为用户提供足够的图像数据用于辅助。
[0014]
在另一有利的构型中,根据本发明的方法包括求取拖车已耦接的步骤。这可以通过可供牵引车辆使用的所有周围环境传感器来实现,尤其是通过拖车耦合传感器和/或超
声波传感器和/或倒车摄像机来实现。由此,再次可以节省计算能力,因为在没有拖车的情况下在调度操作时不需要实施根据本发明的方法。此外,例如也可以借助牵引车辆的车载电子装置来决定停用在耦接的情况下持久对拖车进行感测的超声波传感器。
[0015]
在一个有利的扩展方案中,根据本发明的方法包括过滤对象的如下步骤:该对象是否具有碰撞相关性。例如,可以为在牵引车辆的车载电子装置的存储器上预先限定的参考分配针对不同对象的不同碰撞相关性。例如,如果通过倒车摄像机求取到消防栓,则可以给这个消防栓分配高的碰撞相关性。在是地面标记的情况下,例如可以给该地面标记分配“无碰撞相关性”的属性。例如,可以借助倒车摄像机来求取消防栓的位置。在被拖车遮挡的情况下,可以以测距法来求取对消防栓的靠近。然后例如,对象、即例如消防栓可以通过叠加的图像元素视“碰撞危险”而定地用颜色来编码(从绿色到红色)。此外或替代地,也可以输出声学警告,尤其是颤音和/或喇叭和/或蜂鸣声,和/或可以输出触觉反馈、例如方向盘振动。附加地或替代地,也可以根据牵引车引导的相关性来过滤对象。为此,也可以根据预先限定的参考对对象进行归类。在此,所述归类尤其可以分层地进行。例如,停车线可以比井盖被分配更高的等级。尤其,可以过滤掉等级低的对象。因此,拖车的成像叠加可以构型为对于用户来说更清晰。
[0016]
根据本发明的以下方面具有带有上述技术特征的有利构型和扩展方案以及具有根据本发明的方法的普遍优点并且相应地具有分别与此相关的技术效果。因此,为了避免重复,下面省去了重新列举。
[0017]
根据第二方面,本发明涉及一种系统,该系统设置为用于实施根据本发明第一方面的方法。尤其,该系统可以包含在挂车组合(由牵引车辆和拖车组成)中。尤其,牵引车辆包括倒车摄像机、包括分析评价单元以及显示器,所述倒车摄像机设置为用于感测静止的对象,所述分析评价单元设置为用于求取静止的对象被拖车的遮挡并且所述分析评价单元还设置为用于将带有代表被遮挡对象的图像元素的拖车成像叠加到借助倒车摄像机所求取的图像中,所述显示器设置为用于示出图像。
[0018]
根据第三方面,本发明涉及一种挂车组合,所述挂车组合包括根据本发明第二方面的系统。
附图说明
[0019]
下面,参照附图详细说明本发明的实施例。在附图中:
[0020]
图1示出根据发明的挂车组合的一个实施方式;
[0021]
图2示出根据发明的挂车组合的一个实施方式的俯视图;
[0022]
图3示出根据本发明的方法的一个实施方式的方法步骤的图解;
[0023]
图4示出根据本发明的方法的另一实施方式的方法步骤的图解;以及
[0024]
图5示出根据本发明的方法的一个实施方式的流程图。
具体实施方式
[0025]
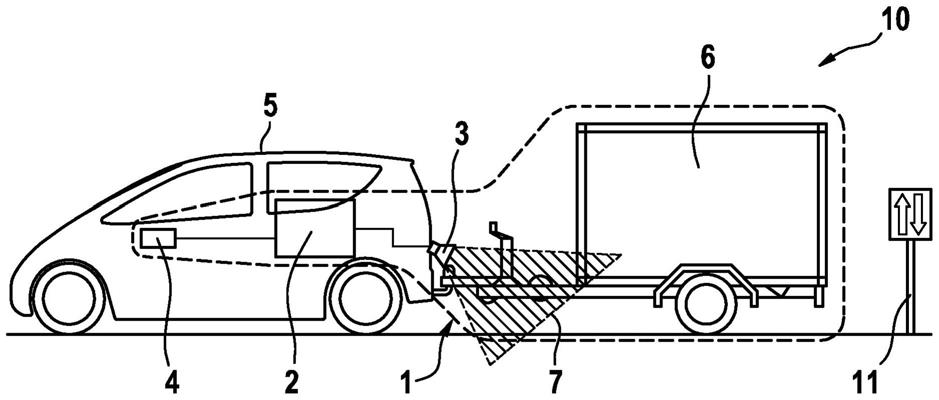
图1示出根据本发明的挂车组合10的一种实施方式,该挂车组合包括在这里呈载客车形式的牵引车辆5和拖车6。此外,挂车组合10包括根据本发明的系统1,该系统包括显示器4、分析评价单元2和倒车摄像机3。在此,倒车摄像机3设置为用于借助于分析评价单元
2来求取:之前通过倒车摄像机3的视野7所感测的、在这里呈标志牌形式的对象11是否被拖车6遮挡。与分析评价单元2连接的显示器4示出相应的图像,该图像包含拖车6的成像,并且在拖车6遮挡了对对象11的视野7的情况下,代表对象11的图像元素13叠加到该成像上。
[0026]
图2示出来自俯视图的根据本发明的挂车组合10的一个实施方式。
[0027]
图3通过相应的俯视图示出根据本发明的方法的一种实施方式的方法步骤的图解,所述俯视图分别示出牵引车辆5的成像、拖车6的成像和倒车摄像机3的视野7的成像。在此,图3中的序列图(kacheln)用于解释步骤s1至s6。对于步骤s1,示出挂车组合10的向前行驶的俯视图,该向前行驶由向前箭头8符号化。在此,倒车摄像机3感测对象11(在当前情况下是车道上的停车线9)。对于步骤s2,示出调度操作的开始。在此,停车线9由于视野12被遮挡而没有被示出。在步骤s3中在触发了根据本发明的用于在调度操作时进行辅助的方法之后,将代表该对象的图像元素13投影到被遮挡的区域中。在步骤s4至s6的图解中,拖车6同时被倒车摄像机3感测到并且该拖车的位置连续地被求取,以便能够相对于停车线9来进行定向。在此,当对于倒车摄像机3来说由于遮挡而不能感测到真实的停车线9时,图像元素13被叠加到被遮挡的视野12的成像上和拖车6的成像上。
[0028]
图4示出根据本发明的方法步骤的图解,其中,在调度操作开始之前并且在该调度操作期间所拍摄的、由倒车摄像机3拍摄的环境拍摄内容被添加到俯视图像中。在此,图4内的序列图解释了方法步骤l1至l6。在此,在步骤l1中,在向前行驶(在调度操作开始之前)期间以及在步骤l2中在调度操作开始期间,由倒车摄像机3所感测的周围环境的图像被存储。最后在步骤l3中,将之前所拍摄的图像叠加到被遮挡的视野12的成像上,由此,被遮挡的视野12的成像相对于被遮挡的真实视野12在面积方面减小地被示出。在步骤l4至l6中,将之前拍摄的倒车摄像机图像以运动补偿的方式叠加到被遮挡视野12的成像上。经运动补偿所创建的这种图像例如可以类似连环画地以“3d-艺术地图”和/或以线条图和/或以幻象(geisterbild)和/或以渐变图像的形式示出。这例如可以在分析评价单元2的3d图形处理器上、尤其在车载主机上实现。
[0029]
图5示出根据本发明的方法的一个实施方式的流程图。在第一步骤100中,触发根据本发明的方法,所述方法用于在由牵引车辆5例如以小于6公里/小时的速度缓慢行驶进行的调度操作情况下进行辅助。响应于此,在第二步骤200中,通过牵引车辆5的倒车摄像机3来感测静止的对象11,例如停车线9。在第三步骤300中,例如借助分析评价单元2来求取,是否存在被遮挡的视野12,这可能由于对象11被拖车6遮挡所引起。如果存在这种遮挡,则在第四步骤400中,在由倒车摄像机3所求取的图像上,拖车6的图像被代表被遮挡的对象11的图像元素13叠加,该图像例如在显示器4上示出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1