一种内置陀螺仪和高清监控的5G重载爬壁机器人的制作方法
一种内置陀螺仪和高清监控的5g重载爬壁机器人
技术领域
1.本实用新型涉及机器人,特别涉及一种内置陀螺仪和高清监控的5g重载爬壁机器人。
背景技术:
2.对于船舶或者大型铁质罐体场景下,爬壁机器人一般采用永磁吸附,因为可以携带较大的负载(高压水射流的压力很大,对应的吸附力要求也高);同时工作面都有将强的曲面特征,所以也多采用轮式的永磁吸附;但是在机器人控制上多采用高遥控器进行控制,相当于需要一个驾驶员;很难实现机器人根据规划路径进行自主行进作业。
3.而常用的永磁吸附机器人,因为采用永磁体,其磁吸附力在同等的环境下可以认为是一个常数,在机器人负载有突变的时候,容易发生磁力不够的情况,但是据此提高永磁体,又会大幅提高自重导致负载能力下降。
技术实现要素:
4.为了解决上述技术问题,本实用新型中披露了一种内置陀螺仪和高清监控的5g重载爬壁机器人,本实用新型的技术方案是这样实施的:
5.一种内置陀螺仪和高清监控的5g重载爬壁机器人,包括驱动结构支架(6)、主动轮(7)、从动轮(3)、动力系统、磁性吸附装置和清洁装置(2),所述主动轮(7)、所述从动轮(3)、所述动力系统和所述清洁装置(2)安装在所述驱动结构支架(6)上,所述主控制器(8)内设置有通讯单元;所述主控制器(8)中运行有机器人车身控制系统;其特征在于:所述磁性吸附装置包括永磁体和电磁体(5);所述永磁体包括从动轮永磁体和主动轮永磁体;所述从动轮永磁体放置于所述从动轮(3)的轴下部;所述主动轮永磁体放置于所述主动轮(7)的轴下部;所述电磁体(5)安装在所述驱动结构支架(6)的底部。
6.优选地,还包括空间控制器(1);所述空间控制器(1)为九轴陀螺仪或者十轴陀螺仪;所述动力系统外围包裹有橡胶同步带;所述从动轮永磁体与工作面之间设置有橡胶同步带;所述主动轮永磁体与所述工作面之间设置有橡胶同步带;
7.优选地,所述动力系统包括大功率高扭矩直流电机和涡轮蜗杆减速机;所述大功率高扭矩直流电机连接所述涡轮蜗杆减速机。
8.优选地,还包括通信天线单元(9);所述通信天线单元(9)为5g通信天线单元;所述通信天线单元(9)连接所述通讯单元;所述通讯单元为5g通讯单元。
9.优选地,还包括摄像头(4);所述摄像头(4)为防水雨刮监控摄像头。
10.优选地,所述主控制器(8)使用基于arm的高主频内核。
11.优选地,所述清洁装置(2)为高压水射流摇臂或者真空回收盘。
12.优选地,所述驱动结构支架(6)上设置有安装孔位。
13.优选地,所述电磁体(5)设置有船型外壳保护。
14.实施本实用新型的技术方案可解决现有技术中在机器人负载有突变的时候,容易
发生磁力不够的情况,但是据此提高永磁体,又会大幅提高自重导致负载能力下降的技术问题;实施本实用新型的技术方案,可实现提高机器人负载适应能力,进而提高负载的技术效果。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一种实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
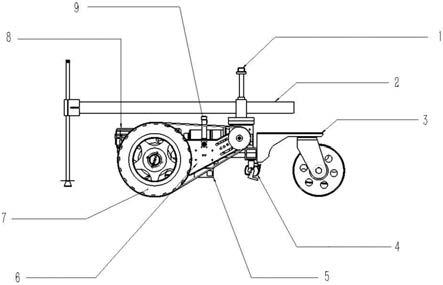
16.图1为一种内置陀螺仪和高清监控的5g重载爬壁机器人的主视图;
17.图2为一种内置陀螺仪和高清监控的5g重载爬壁机器人的俯视图。
18.在上述附图中,各图号标记分别表示:
19.空间控制器(1)、清洁装置(2)、从动轮(3)、摄像头(4)、电磁体(5)、驱动结构支架(6)、主动轮(7)、主控制器(8)、通信天线单元(9)。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.在一种具体的实施例中,如图1、2所示,一种内置陀螺仪和高清监控的5g重载爬壁机器人,包括驱动结构支架(6)、主动轮(7)、从动轮(3)、动力系统、磁性吸附装置和清洁装置(2),所述主动轮(7)、所述从动轮(3)、所述动力系统和所述清洁装置(2)安装在所述驱动结构支架(6)上,所述主控制器(8)内设置有通讯单元;所述主控制器(8)中运行有机器人车身控制系统;其特征在于:所述磁性吸附装置包括永磁体和电磁体(5);所述永磁体包括从动轮永磁体和主动轮永磁体;所述从动轮永磁体放置于所述从动轮(3)的轴下部;所述主动轮永磁体放置于所述主动轮(7)的轴下部;所述电磁体(5)安装在所述驱动结构支架(6)的底部。
22.在该种具体的实施例中,通过设置在主动轮(7)和从动轮(3)上的从动永磁体和主动永磁体,将整体固定在工作面上,并根据实际的情况对电磁体(5)进行控制,根据负载的不同,使用电磁体(5)实现对磁力的补充,如在高负载时启动电磁铁,低负载时关闭,从而提高了负载能力并有效提高了操作的灵活性,提高机器人负载适应能力,进而提高负载。
23.在一种优选的实施例中,如图1、2所示,还包括空间控制器(1);所述空间控制器(1)为九轴陀螺仪或者十轴陀螺仪,在作业过程中,可以通过该陀螺仪实时测量爬壁机器人的空间角度信息;从而得到工作面的状况,配合机器人控制系统实现在空间曲面内水平前进,垂直前进或者指定的角度的转向。
24.在一种优选的实施例中,如图1、2所示,所述动力系统外围包裹有橡胶同步带;所述从动轮永磁体与工作面之间设置有橡胶同步带;所述主动轮永磁体与所述工作面之间设置有橡胶同步带;所述动力系统包括大功率高扭矩直流电机和涡轮蜗杆减速机;所述大功
率高扭矩直流电机连接所述涡轮蜗杆减速机。
25.在该种优选的实施例中,通过橡胶同步带,避免了从动轮(3)或者主动轮(7)对工作面的直接接触,从而减少了工作过程中对于主动轮(7)或者从动轮(3)的磨损;动力系统为2套大功率高扭矩直流电机,配合涡轮蜗杆减速机实现扭矩增强和精确稳定的行进,同时电机内置于驱动支架和橡胶同步带的包覆之中,保护工作环境的安全。
26.在一种优选的实施例中,如图1、2所示,还包括通信天线单元(9);所述通信天线单元(9)为5g通信天线单元;所述通信天线单元(9)连接所述通讯单元;所述通讯单元为5g通讯单元,当需要工作是操作面高清图传实时回传时,可通过遥控器或者地面系统开启5g通信模式。
27.在一种优选的实施例中,还包括摄像头(4);所述摄像头(4)为防水雨刮监控摄像头,通常作业对象如大型船舶或者罐体距离操作人员比较远,在清洁时希望能够实时看到清洁后的表面情况,同时也起到同步探伤观察的作用。
28.在一种优选的实施例中,如图1、2所示,所述主控制器(8)使用基于arm的高主频内核;机器人车身控制系统mcs运行于arm内核高主频实时嵌入式操作系统,支持多种操控方式:近距现场可以是nrf遥控器,中距可以使用433mhz数传或者wifi图传,远距可以使用4g和5g;mcs通过高精度的的编码器可以实时监测电机运行的状态,如距离、角度等,实现准确的行动,机器人机身内置5g通信模块模块,当需要工作是操作面高清图传实时回传时,可通过遥控器或者地面系统开启5g通信模式。
29.在一种优选的实施例中,如图1、2所示,所述清洁装置(2)为高压水射流摇臂或者真空回收盘,所述驱动结构支架(6)上设置有安装孔位,可附加其他类型的清洁装置(2),实现一套车架同时多种清洁系统。
30.在一种优选的实施例中,如图1、2所示,所述电磁体(5)设置有船型外壳保护。
31.需要指出的是,以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1