一种可自编程驱动的六足机器人的制作方法
1.本实用新型涉及机器人技术领域,特别涉及一种可自编程驱动的六足机器人。
背景技术:
2.六足机器人是模仿蜘蛛的行动模式而设计的一种仿生机器人,随着科学技术的不断发展,六足机器人在抢险救灾、警用救援等领域中可以起到重要作用。
3.以往的六足机器人存在以下缺点:1、机器人的防撞效果不佳;2、机器人用来安装控制电路板的避震效果不佳;3、机器人不能方便在保持防尘效果的同时提升散热效果。为此,我们提出一种可自编程驱动的六足机器人。
技术实现要素:
4.本实用新型的主要目的在于提供一种可自编程驱动的六足机器人,可以有效解决背景技术中的问题。
5.为实现上述目的,本实用新型采取的技术方案为:
6.一种可自编程驱动的六足机器人,包括圆形底盘、控制电路板安装盒和固定柱,所述圆形底盘外围连接有固定柱,所述固定柱顶部一端设置有圆形卡槽,所述柱形弹簧下端均设置有第一伺服电机,所述第一伺服电机的输出端套设于圆形卡槽内,所述第一伺服电机外侧连接有第一连接板且第一连接板下端通过螺钉固定安装有l形板,所述l形板一侧设置有第二伺服电机,所述l形板一端设置有固定槽且第二伺服电机的输出端卡设于固定槽内,所述第二伺服电机外侧连接有第二连接板且第二连接板下端通过螺钉固定安装有抬升支脚,所述圆形底盘顶部两端均连接有导筒,所述控制电路板安装盒底部两端连接有导杆且导杆底端位于导筒内,所述导杆底部通过柱形弹簧与导筒内底部连接,所述控制电路板安装盒顶部通过紧固螺钉固定安装有顶盖,所述顶盖顶部靠近边缘处均开设有预留槽,所述预留槽内设置有防尘网,所述控制电路板安装盒外围通过预留孔安装有走线管,所述圆形底盘底端外围通过卡槽卡设有防撞挡条。
7.进一步地,所述防撞挡条为橡胶材料制成。
8.进一步地,所述控制电路板安装盒内底部通过螺丝安装有控制电路板,所述控制电路板的电力输出端与第一伺服电机和第二伺服电机的电力输入端通过导线构成电连接,所述导线贯穿走线管。
9.进一步地,所述固定柱的数量具体设置为六组且沿圆形底盘的圆心呈圆周均匀分布。
10.与现有技术相比,本实用新型具有如下有益效果:
11.1.本实用新型一种可自编程驱动的六足机器人,利用圆形底盘底端外围套设的防撞挡条,可以有效提升圆形底盘的防撞效果,从而可以减小本机器人在爬行时的受到损坏的可能。
12.2.本实用新型一种可自编程驱动的六足机器人,利用导筒内底部的柱形弹簧,方
便在本机器人进行爬行时,有效对控制电路板安装盒进行避震,防止控制电路板安装盒内底部安装的控制电路板易于在机器人爬行时损坏。
13.3.本实用新型一种可自编程驱动的六足机器人,利用顶盖顶部靠近边缘处安装的预留槽和防尘网,可以方便在保持防尘效果的同时提升控制电路板安装盒的散热效果,大大提升实用性。
附图说明
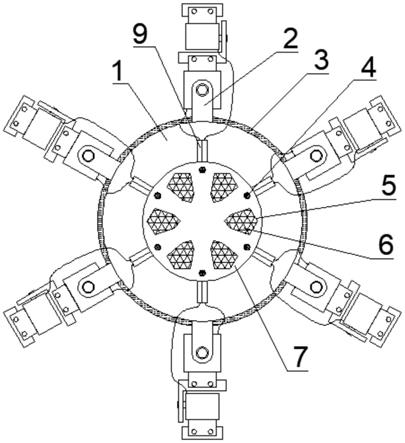
14.图1为本实用新型一种可自编程驱动的六足机器人的整体结构示意图。
15.图2为本实用新型一种可自编程驱动的六足机器人的圆形底盘和控制电路板安装盒侧视结构示意图。
16.图3为本实用新型一种可自编程驱动的六足机器人的第一伺服电机和第二伺服电机示意图。
17.图中:1、圆形底盘;2、固定柱;3、防撞挡条;4、紧固螺钉;5、预留槽;6、防尘网;7、顶盖;8、控制电路板安装盒;9、走线管;10、导筒;11、导杆;12、柱形弹簧;13、抬升支脚;14、圆形卡槽;15、第一伺服电机;16、第一连接板;17、l形板;18、第二伺服电机;19、第二连接板。
具体实施方式
18.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
19.如图1
‑
3所示,一种可自编程驱动的六足机器人,包括圆形底盘1、控制电路板安装盒8和固定柱2,所述圆形底盘1外围连接有固定柱2,所述固定柱2顶部一端设置有圆形卡槽14,所述柱形弹簧12下端均设置有第一伺服电机15,所述第一伺服电机15的输出端套设于圆形卡槽14内,所述第一伺服电机15外侧连接有第一连接板16且第一连接板16下端通过螺钉固定安装有l形板17,所述l形板17一侧设置有第二伺服电机18,所述l形板17一端设置有固定槽且第二伺服电机18的输出端卡设于固定槽内,所述第二伺服电机18外侧连接有第二连接板19且第二连接板19下端通过螺钉固定安装有抬升支脚13,所述圆形底盘1顶部两端均连接有导筒10,所述控制电路板安装盒8底部两端连接有导杆11且导杆11底端位于导筒10内,所述导杆11底部通过柱形弹簧12与导筒10内底部连接,所述控制电路板安装盒8顶部通过紧固螺钉4固定安装有顶盖7,所述顶盖7顶部靠近边缘处均开设有预留槽5,所述预留槽5内设置有防尘网6,所述控制电路板安装盒8外围通过预留孔安装有走线管9,所述圆形底盘1底端外围通过卡槽卡设有防撞挡条3。
20.其中,所述防撞挡条3为橡胶材料制成。
21.本实施例中如图1所示,橡胶材料制成的防撞挡条3具有良好的防护效果,可以在圆形底盘1底部受到撞击时,有效对撞击能量进行吸收。
22.其中,所述控制电路板安装盒8内底部通过螺丝安装有控制电路板,所述控制电路板的电力输出端与第一伺服电机15和第二伺服电机18的电力输入端通过导线构成电连接,所述导线贯穿走线管9。
23.本实施例中如图1所示,通过对控制电路板进行编程,从而可以经由贯穿于走线管9内的导线将编程后的输出信号传递到第一伺服电机15和第二伺服电机18上,从而实现对
第一伺服电机15和第二伺服电机18的转动控制。
24.其中,所述固定柱2的数量具体设置为六组且沿圆形底盘1的圆心呈圆周均匀分布。
25.本实施例中如图1所示,利用多组固定柱2,方便多组导线进行走线。
26.需要说明的是,本实用新型为一种可自编程驱动的六足机器人,工作时,控制电路板和蓄电池均安装在控制电路板安装盒8内底部,通过对控制电路板进行编程,从而可以经由贯穿于走线管9内的导线将编程后的输出信号传递到第一伺服电机15和第二伺服电机18上,从而实现对第一伺服电机15和第二伺服电机18的转动控制,第一伺服电机15工作时,方便带动抬升支脚13进行转动,第二伺服电机18在工作时,方便带动抬升支脚13进行抬起或放下,进而可以实现本机器人的行走,利用圆形底盘1底端外围套设的防撞挡条3,可以有效提升圆形底盘1的防撞效果,从而可以减小本机器人在爬行时的受到损坏的可能,利用导筒10内底部的柱形弹簧12,方便在本机器人进行爬行时,有效对控制电路板安装盒8进行避震,防止控制电路板安装盒8内底部安装的控制电路板易于在机器人爬行时损坏,利用顶盖7顶部靠近边缘处安装的预留槽5和防尘网6,可以方便在保持防尘效果的同时提升控制电路板安装盒8的散热效果,大大提升实用性。
27.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1