用于车辆的转向装置的制作方法
1.本发明涉及设置在车辆中的线控转向式转向装置。
背景技术:
2.线控转向式转向装置被构造成使得由驾驶员操作的方向盘和使车轮转动的齿条轴机械地分离,转向角传感器检测方向盘的转向角,并且转动致动器根据转向角使车轮转动。
3.通常,在常规的齿条小齿轮式转向装置中,车轮的最大转动角由齿条轴被机械地限制的位置决定。另一方面,在线控转向式转向装置中,方向盘与齿条轴不是机械连接的,因此方向盘的转向角不被机械地限制。
4.因此,线控转向式转向装置能够执行与齿条小齿轮式转向装置不同的控制。例如,在方向盘的转向角在规定时间段或更长时间段内保持与对应于齿条末端位置(齿条的移动被机械地限制的位置)的角度匹配的情况下,已知的技术通过使施加到方向盘的反作用力比通常情况大来提示驾驶员使方向盘返回(参见jp2011-251640a)。
5.顺便提及,当设计车辆的悬架及其周边时,需要在车轮与车身的一侧的构件(例如,框架或悬架;下文称为“车身侧构件”)之间留有规定间隙,使得即使车轮进入最大转动状态(使车轮转动到最大转动角的状态)并且悬架进入大行程状态(悬架的行程量变大的状态),车轮也不会干扰车身侧构件。更具体地,通过形成在车身侧构件上的凹部来防止车轮与车身侧构件之间的干扰。然而,当采用这种方法时,对车身侧构件的横截面形状施加严格的限制,这可能降低车身侧构件的设计灵活性。
6.另一方面,在线控转向式转向装置中,只要将作为转向控制的参数的车轮的最大转动角设定成使得车轮不干扰车身侧构件,就可以灵活地设定车轮的最大转动角,而不管转向装置的机械结构如何。因此,在线控转向式转向装置中,期望通过缓和用于防止车轮与车身侧构件之间的干扰的结构限制来提高诸如悬架的车身侧构件的设计灵活性。
技术实现要素:
7.鉴于上述背景技术,本发明的目的是提供一种用于车辆的线控转向式转向装置,该线控转向式转向装置能够防止车轮与车身侧构件之间的干扰,并且提高诸如悬架的车身侧构件的设计灵活性。
8.为了实现这种目的,本发明的一个方面提供一种用于车辆1的转向装置11,该转向装置包括:操作构件(方向盘13),该操作构件被构造成由驾驶员操作;转动构件(齿条轴12),该转动构件与操作构件机械地分离并且被构造成使车轮4转动;转动装置(转动致动器16),该转动装置被构造成驱动转动构件;以及控制器21,该控制器被构造成控制所述转动装置,其中,所述控制器具有:第一控制模式,在所述第一控制模式中,所述车轮的最大转动角被设定为与用于使所述车轮机械地转动的最大角度对应的第一角度;以及第二控制模式,在所述第二控制模式中,所述车轮的所述最大转动角被设定为小于所述第一角度的第
二角度;并且所述控制器被构造成基于自车的由行驶状况检测单元检测到的当前行驶状况来在所述第一控制模式与所述第二控制模式之间切换。
9.根据该方面,在车轮与车身侧构件之间的干扰不太可能发生的行驶状况下,也就是说,在悬架的行程量不变大的行驶状况下,车轮的最大转动角被设定为与用于使车轮机械地转动的最大角度对应的第一角度。因此,车辆的最小转弯半径变小,从而能够获得车辆的急转弯特性。另一方面,在车轮与车身侧构件之间的干扰可能发生的行驶状况下,也就是说,在悬架的行程量可能变大的行驶状况下,车轮的最大转动角被限制到小于第一角度的第二角度,使得能够防止车轮与车身侧构件之间的干扰。因此,可以防止车轮与车身侧构件之间的干扰,并且提高诸如悬架的车身侧构件的设计灵活性。
10.在上述方面中,优选地,所述行驶状况检测单元是被构造成检测作为所述行驶状况的车辆速度的车辆速度检测单元(车辆速度传感器22),并且所述控制器在所述车辆速度等于或低于规定值的情况下设置所述第一控制模式,并且在所述车辆速度高于所述规定值的情况下设置所述第二控制模式。
11.根据该方面,能够基于车辆速度适当地切换控制模式。也就是说,当车辆以低速行驶时,最大转动角被设定为第一角度,使得车轮能够尽可能地转动。因此,当在狭窄的道路上停放车辆或驾驶车辆时,可以发挥车辆的急转弯特性。另一方面,当车辆以高速行驶时,最大转动角被限制到第二角度,从而防止车轮显著地转动。因此,即使在车轮在横向加速度大的状态下(例如,在车辆进行高速转动的状态下)移动到台阶上的这种情形下悬架的行程量变大(即使悬架被大幅延伸),也可以防止车轮与车身侧构件之间的干扰。
12.在上述方面中,优选地,所述第二角度是在所述车轮的滑移角变为等于或大于规定阈值的情况下所述车轮的角度。
13.根据该方面,在车轮的滑移角变得等于或大于规定阈值的状态下,即使转动角改变,车辆的横向力也不会显著改变。因此,期望通过将车轮的最大转动角限制到第二角度来防止车轮不必要地转动。顺便提及,上述阈值可以被设定为车轮的与横向力根据滑移角而显著改变的小滑移角区域和横向力不根据滑移角而显著改变的大滑移角区域之间的边界(或其附近)对应的角度。
14.在上述方面中,优选地,在所述第一控制模式中,在所述行驶状况改变到与所述第二控制模式对应的情况下,所述控制器控制所述转动装置,使得所述车轮的实际转动角与所述第二角度匹配。
15.根据该方面,可以将最大转动角改变到适合于当前行驶状况的角度。结果,车轮转动而不管驾驶员的转向操作如何。然而,即使实际转动角改变到第二角度,车辆的横向力也不会显著改变,因此车辆的行为不会显著改变。因此,可以防止驾驶员感觉到不适。
16.在上述方面中,优选地,在与所述第一控制模式对应的所述行驶状况下,所述控制器在检测到所述车轮移动到台阶上之后将所述最大转动角设定为已被校正为减小规定值的所述第一角度。
17.根据该方面,在正常情形下悬架的行程量不太可能变大的行驶状况下,当车轮移动到台阶上时悬架的行程量变大的情况下,作为最大转动角的第一角度被校正为减小,使得能够确实防止车轮与车身侧构件之间的干扰。顺便提及,例如,可以基于竖直加速度来检测车轮移动到台阶上。
18.在上述方面中,优选地,所述第一角度是在悬架的初始状态下所述车轮不干扰车身的一侧的构件、并且在所述悬架的规定大行程状态下所述车轮干扰所述车身的一侧的构件的角度,并且所述第二角度是在所述悬架的所述大行程状态下所述车轮不干扰所述车身的一侧的构件的角度。
19.根据该方面,可以通过将车轮的最大转动角设定为第一角度来获取急转弯特性。此外,可以通过将车轮的最大转动角限制到第二角度来可靠地防止车轮与车身侧构件之间的干扰。
20.因此,根据上述方面,可以提供一种线控转向式转向装置,该线控转向式转向装置能够防止车轮与车身侧构件之间的干扰,并且提高诸如悬架的车身侧构件的设计灵活性。
附图说明
21.图1是设置有根据本实施方式的转向装置的车辆的示意性框图;
22.图2是示出车轮的转动状态的车身的仰视图;
23.图3是示出车轮的横向力特性的曲线图;以及
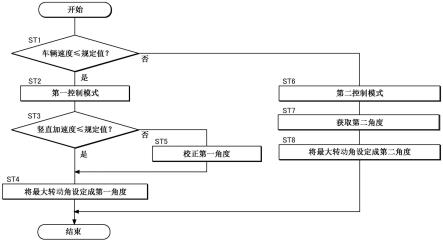
24.图4是示出由控制器执行的最大转动角控制的过程的流程图。
具体实施方式
25.以下,将参照附图详细描述本发明的实施方式。
26.图1是设置有根据本实施方式的转向装置11的车辆1的示意性框图。如图1所示,车辆1是四轮汽车,包括由车身2经由悬架3支撑的四个车轮4。
27.车辆1包括驱动车轮4的动力装置5(使车辆行驶的驱动装置)以及改变从动力装置5到车轮4的驱动力的传递模式的变速器6(传动装置)。动力装置5由内燃发动机和电动马达中的至少一者构成,并且动力装置5的驱动力和制动力(发动机制动)被传递到车轮4。动力装置5根据驾驶员的加速器操作来控制。此外,变速器6根据驾驶员的换档操作来控制。
28.此外,车辆1包括使车轮4(例如,前轮4)转动的线控转向式转向装置11。转向装置11包括齿条轴12(转动构件)、方向盘13(操作构件)、转向角传感器14、转动角传感器15、转动致动器16(转动装置)、反作用力致动器17(反作用力装置)和转向转矩传感器18。顺便提及,转向装置11由所谓的无轴线控转向式转向装置构成,在该无轴线控转向式转向装置中,齿条轴12和方向盘13不机械连接。
29.方向盘13由驾驶员操作。转向角传感器14检测方向盘13的转向角。转动角传感器15检测车轮4(例如,前轮4)的转动角。转动致动器16通过推或拉齿条轴12来驱动齿条轴12,从而使车轮4转动。反作用力致动器17向方向盘13施加对驾驶员的操作的反作用力。转向转矩传感器18检测施加到转向轴19的转向转矩。顺便提及,可以不设置转向转矩传感器18,并且可以通过仅使用反作用力致动器17中的旋转角传感器(转向角传感器)来控制方向盘13。
30.此外,车辆1包括控制器21(电子控制单元:ecu)、车辆速度传感器22(驾驶状况检测单元和车辆速度检测单元)和加速度传感器23。控制器21由处理器、存储器等构成,并基于诸如转向角传感器14、转动角传感器15、转向转矩传感器18、车辆速度传感器22和加速度传感器23的传感器的检测结果来控制转动致动器16和反作用力致动器17。
31.接下来,将描述每个车轮4的转动状态。图2是示出车轮4的转动状态的车身2的仰
视图。
32.在车身2的左侧和右侧,设置有在前后方向上延伸的一对侧框架41。此外,每个车轮4(在下文中简称为“车轮4”)由车身2经由对应的悬架3(在下文中简称为“悬架3”)支撑。在车轮4的最大转动状态(使车轮4转动到最大转动角的状态)下悬架3进入大行程状态(悬架3的行程量(行程长度)大的状态)的情况下,侧框架41和悬架3的下框架42分别对应于可能干扰车轮4的位于车身2的一侧的构件(以下称为“车身侧构件”)。
33.顺便提及,控制器21(参见图1)具有第一控制模式和第二控制模式,在第一控制模式中,车轮4的最大转动角被设定为与用于使车轮4机械地转动的最大角度对应的第一角度,在第二控制模式中,车轮4的最大转动角被设定为小于第一角度的第二角度。控制器21根据自车(即,车辆1)的当前行驶状况来执行控制以在第一控制模式与第二控制模式之间切换。
34.顺便提及,第一角度是在悬架3的初始状态下车轮4不干扰车身侧构件、但在悬架3的规定大行程状态(例如,悬架3的行程量大于规定量的状态)下干扰车身侧构件的角度。第二角度是在悬架3的大行程状态下车轮4不干扰车身侧构件的角度。
35.因此,在车轮4与车身侧构件之间的干扰不太可能发生的行驶状况下,也就是说,在悬架3的行程量不变大的行驶状况下,车轮4的最大转动角被设定为与用于使车轮4机械地转动的最大角度对应的第一角度。因此,车辆1的最小转弯半径变小,从而能够获得车辆1的急转弯特性。
36.另一方面,在车轮4与车身侧构件之间的干扰可能发生的行驶状况下,也就是说,在悬架3的行程量可能变大的行驶状况下,车轮4的最大转动角被限制到小于第一角度的第二角度,使得能够防止车轮4与车身侧构件之间的干扰。
37.在图2所示的示例中,在侧框架41上形成有两个凹部45和47,并且在悬架3的下框架42上形成有凹部46。如果在车轮4与车身侧构件之间的干扰可能发生的行驶状况下最大转动角不限制到第二角度,则可以形成这些凹部45、46、47。如果存在这样的凹部45、46、47,则会对侧框架41和下框架42的横截面形状施加严格的限制,这可能会降低侧框架41和下框架42的设计灵活性。
38.相反,在本实施方式中,在车轮4与车身侧构件之间的干扰可能发生的行驶状况下,最大转动角被限制到第二角度。因此,不需要设置凹部45、46、47,或者能够减小凹部45、46、47的深度。也就是说,在上述构造中,如果在车轮4处于与用于使车轮4机械地转动的最大角度对应的第一角度的状态下悬架3进入大行程状态,则车轮4可能干扰车身侧构件。即使采用这种构造,也可以通过在悬架3可能变为大行程状态的行驶状况下控制车轮4以使车轮4仅转动至小于第一角度的第二角度,来防止车轮4干扰车身侧构件。
39.因此,可以防止车轮4与车身侧构件之间的干扰,并且提高诸如侧框架41和悬架3的车身侧构件的设计灵活性。因此,可以通过使车身侧构件的结构合理化(例如,通过确保车身侧构件的横截面面积)来减小车身侧构件的重量。此外,在不显著改变车身侧构件的形状的情况下,可以通过增大最大转动角来减小车辆1的最小转弯半径,并因此增强其急转弯特性。
40.接下来,将描述在第二控制模式中被设定为最大转动角的第二角度。图3是示出车轮4的横向力特性的曲线图,即,横向力根据车轮4的滑移角的改变特性。在下文中,“横向
力”表示横向力的绝对值,并且“滑移角”表示滑移角的绝对值。
41.横向力根据由车轮4的转动引起的滑移角而产生。此时,在滑移角相对小的小滑移角区域中,随着车轮4转动并且滑移角对应地变大,横向力增大。相反,在滑移角相对大的大滑移角区域,即使车轮4转动并且滑移角对应地变大,横向力也几乎不改变。例如,在车轮4在中速范围或高速范围内显著转动的情况下,即使滑移角变大,横向力也几乎不改变。
42.在本实施方式中,在第二控制模式中被设定为最大转动角的第二角度被设定为车轮4的与作为边界值的滑移角对应的角度,该边界值是横向力根据滑移角而显著改变的每个小滑移角区域与横向力不根据滑移角而显著改变的每个大滑移角区域之间的边界值。
43.因此,即使车轮4转动超过第二角度,横向力也几乎不改变,因此车轮4转动超过第二角度变得无效。因此,可以通过将车轮4的最大转动角限制到第二角度来防止车轮4不必要地转动。
44.在本实施方式中,通过使用转动角限制映射来在第二控制模式中设定作为最大转动角的第二角度。在该转动角限制映射中,可以基于由车辆速度传感器22检测到的车辆速度和由转动角传感器15检测到的转动角来获取第二角度。
45.顺便提及,可以基于车辆速度和转动角来检测(估计)滑移角。因此,可以基于车辆速度和转动角来设定第二角度(即,车轮4的与作为小滑移角区域与大滑移角区域之间的边界值的滑移角对应的角度)。
46.顺便提及,可以基于由加速度传感器23检测到的横向加速度来估计横向力。因此,可以基于由加速度传感器23检测到的横向加速度来设定第二角度。此外,在可以检测悬架3的行程量的情况下(例如,在使用能够控制其阻尼力的可变阻尼器的情况下),可以基于悬架的行程量来设定第二角度。
47.接下来,将描述由控制器21执行的最大转动角控制的过程。图4是示出最大转动角控制的过程的流程图。
48.首先,控制器21确定车辆速度是否等于或小于规定值(步骤st1)。
49.在车辆速度等于或小于规定值的情况下(st1:是),控制器21设置(选择)第一控制模式(步骤st2)。
50.接下来,控制器21根据竖直加速度是否等于或小于规定值(步骤st3)来确定车轮4是否移动到台阶(路缘等)上。顺便提及,可以从通过使用传感器和摄像头检测车辆1前方的障碍物的系统来获取关于台阶的信息,并且因此可以基于关于台阶的信息来检测车轮4移动到台阶上。另选地,可以基于悬架3的行程量来检测车轮4移动到台阶上。
51.在竖直加速度等于或小于规定值的情况下,也就是说,在车轮4未移动到台阶上的情况下(st3:是),控制器21将最大转动角设定为第一角度(步骤st4)。
52.另一方面,在竖直加速度大于规定值的情况下,也就是说,在控制器21检测到车轮4移动到台阶上的情况下(st3:否),控制器21通过将第一角度减小规定值来校正第一角度(st5)。然后,控制器21将最大转动角设定为经校正的第一角度(步骤st4)。第一角度的校正范围可以被适当地设定为常数,或者可以基于竖直加速度的大小等来设定(改变)。
53.此外,在车辆速度高于规定值的情况下(st1:否),控制器21设置(选择)第二控制模式(步骤st6)。接下来,控制器21基于转动角限制映射来获取第二角度(步骤st7)。接下来,控制器21将最大转动角设定为第二角度(步骤st8)。
54.因此,在本实施方式中,在车辆速度等于或低于规定值的情况下,在第一控制模式中将最大转动角设定为第一角度。另一方面,在车辆速度高于规定值的情况下,在第二控制模式中将最大转动角设定为第二角度。因此,当车辆1以低速行驶时,最大转动角被设定为第一角度,使得车轮4能够尽可能地转动。因此,当在狭窄的道路上停放车辆1或驾驶车辆1时,可以发挥车辆1的急转弯特性。另一方面,当车辆1以高速行驶时,最大转动角被限制到第二角度,从而防止车轮4显著转动。因此,即使在车轮4在横向加速度大的状态下(例如,在车辆1进行高速转动的状态下)移动到台阶上的这种情形下悬架3的行程量变大(即使悬架3被大幅延伸),也能够防止车轮4与车身侧构件之间的干扰。
55.此外,在本实施方式中,在与第一控制模式对应的行驶状况下,控制器21在检测到车轮4移动到台阶上之后将最大转动角设定为已被校正为减小规定值的第一角度。因此,在正常情形下悬架3的行程量不太可能变大的行驶状况下,当车轮4移动到台阶上时悬架3的行程量变大的情况下,作为最大转动角的第一角度被校正为减小,使得能够可靠地防止车轮4与车身侧构件之间的干扰。
56.顺便提及,在车轮4的实际转动角比经校正的第一角度更接近原始第一角度的情况下,最大转动角可以被设定为第一角度,并且转动致动器16可以被控制成使得车轮4的实际转动角与第一角度匹配,以便强制地将车轮4的实际转动角改变到第一角度。
57.此外,在本实施方式中,在控制器21随着车辆1加速并且因此车辆速度增加而从第一控制模式转变到第二控制模式的情况下,最大转动角从第一角度改变到第二角度。此时,车轮4的实际转动角可以处于第一角度至第二角度之间的范围内。例如,在车轮4的最大转动状态下车辆1加速的情况下,控制器21从第一控制模式转变到第二控制模式,因此在车轮4的实际转动角处于第一角度至第二角度之间的范围内的状态下,最大转动角从第一角度切换到第二角度。
58.在这种情况下,控制器21控制转动致动器16,使得车轮4的实际转动角与第二角度匹配,并且因此车轮4的实际转动角被强制改变到第二角度。因此,可以将最大转动角改变到适合于当前行驶状况的角度。
59.另一方面,当车轮4的实际转动角以这种方式被强制改变到第二角度时,车轮4被转动而不管驾驶员的转向操作如何。然而,此时,车轮4的实际转动角处于第一角度至第二角度之间的范围内。也就是说,车轮4的滑移角处于横向力不根据滑移角而显著改变的大滑移角区域中。因此,即使实际转动角被强制改变到第二角度,车辆1的横向力也不会显著改变,因此车辆1的行为不会显著改变。因此,可以防止驾驶员感觉到不适。
60.此外,在控制器21从第一控制模式切换到第二控制模式并且最大转动角从第一角度改变到第二角度的情况下,最大转动角可以从第一角度逐渐改变到第二角度,并且因此车轮4的实际转动角可以逐渐改变到第二角度。因此,可以抑制车辆1的行为的改变,并且减少驾驶员感觉到的不适。
61.顺便提及,在本实施方式中,将车辆速度设定成作为用于在第一控制模式与第二控制模式之间进行切换的标准的行驶状况,在图4的步骤st1中,确定车辆速度是否等于或低于规定值。然而,作为用于切换控制模式的标准的行驶状况并不限于车辆速度。例如,由加速度传感器23检测的横向加速度、悬架3的通过使用阻尼力能够被控制的可变阻尼器来检测的行程量、从通过使用传感器和摄像头检测车辆1前方的障碍物的系统输出的信息等
可以被设定成作为用于切换控制模式的标准的行驶状况。
62.以上,对本发明的具体实施方式进行了描述,但本发明并不应限定于上述实施方式,并且可以进行各种修改和改变。例如,在本发明的范围内,可以适当地改变每个构件和每个部分的具体构造、布置、数量、角度、过程等。此外,并非上述实施方式中所示的所有结构元件都是必需的,并且可以适当地选择性采用它们。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1