园区无人快递车自动配送装置及方法与流程
1.本发明涉及物流运输领域,具体涉及一种园区无人快递车自动配送装置及方法。
背景技术:
2.随着无人驾驶技术的不断发展,越来越多的无人驾驶产品开始得到了应用,特别是在场景相对简单的园区。同时现代网络化销售的方式推动了现代快递业的发展,网购和快递已经深入人们的生活,现在全国专职快递人员已超百万在进行快递配送。在住宅小区(特别是别墅区)、专有园区的快递配送中,出于安全和管理的原因,物业方往往不允许快递人员进入园区送货,只能采取在园区门口等待和放置在园区门口自助货柜的方式,如果园区面积较大,这种方式必然给快递物品的及时送达带来不便,也给快递人员和业主带来不便。而此类园区人员较少,道路情况规范,区域内车辆很少,非常适合利用低速、园区无人驾驶快递车进行最后一公里的自动配送。
技术实现要素:
3.本发明的目的在于提供一种园区无人快递车自动配送装置及方法,以解决封闭管理园区内的配送不便的问题。
4.为解决上述技术问题,本发明提供了一种技术方案:一种园区无人快递车自动配送方法,包括以下步骤,
5.s1、用户通过客户端完成线上购物后,快递员将快递存放至储物柜;
6.s2、管理端向客户端发送取件通知,用户通过客户端选择配送端的配送时间;
7.s3、管理端通过无线网络收集所有无人快递配送车的状态信息,生成信息总集;
8.s4、管理端根据信息总集及配送时间选择预计配送时间最短的无人快递配送车;
9.s5、被选定的无人快递配送车运动至储物柜,将储物柜中存放的快递取出;
10.s6、管理端根据用户地址和当前无人快递配送车位置进行路径规划,并生成取件码发送至客户端;
11.s7、无人快递配送车根据规划的路径将快递运至用户位置,期间管理端控制路径中的门禁开启及关闭;
12.s8、管理端向客户端发送取件通知,用户根据取件码进行取件;
13.s9、无人快递配送车完成配送作业后,若收到管理端分配的新的配送任务,则执行s5~s8所述步骤;否则由管理端为其规划路径使其回到等待区域。
14.按上述方案,s3中信息总集为b(t),t为当前时刻,每一个无人快递配送车的状态信息为b(x)={x,g(x),t(x),z(x),d(x)}∈b(t);
15.其中,x为无人快递配送车编号;g(x)={1,2,3},分别表示无人快递配送车的空闲、损坏以及占用;t(x)为无人快递配送车预计转为空闲状态的时间;z(x)为无人快递配送车在转为空闲状态时的位置到储物柜的距离;d(x)为无人快递配送车在转为空闲状态时,预计运动到储物柜的时间;
[0016][0017]
其中,t0为预测的无人快递配送车从当前时刻转为空闲的时间,δt为管理端根据无人快递配送车的历史运行记录得到的时间误差值。
[0018]
按上述方案,s4过程具体为,根据用户选择的配送时间得到配送时间与当前时刻的时间间隔δt,并计算所有无人快递配送车到储物柜的路程s和时间t,其中,
[0019]
s=z(x)
[0020]
t=t(x)+d(x)
[0021]
根据δt和t筛选符合以下条件的无人快递配送车;
[0022]
|t-δt|≤δδ
[0023]
其中,δδ为用户能够容忍的时间误差值;筛选获得无人快递配送车v1、v2…vn
;随后计算上述无人快递配送车到储物柜的距离s1、s2…
sn,并选取到储物柜的距离最小的无人快递配送车。
[0024]
按上述方案,s5中无人快递配送车将快递从储物柜中取出的过程具体如下,
[0025]
无人快递配送车接收到管理端分配的配送任务后运动至储物柜,储物柜通过传感器对无人快递车进行识别,并将识别到的无人快递车编号上传至管理端;随后管理端根据该无人快递车的编号确定该无人快递车正在执行的配送任务,并将该无人快递车将要配送的快递所存放的位置发送至储物柜和无人快递车;
[0026]
随后无人快递车运动至所要配送快递存放位置的下方,并通过自身设置的伸缩装置将配送箱抬升至取件位置,并打开配送箱;进而储物柜打开对应的柜门,并通过其储物空间内设置的推出装置将快递推至配送箱内,并关闭柜门;
[0027]
当无人快递车检测到其配送箱内接收到快递后,关闭配送箱并通过伸缩装置降下配送箱。
[0028]
按上述方案,s8中,无人快递配送车设置有配送箱开启时间限制,当用户完成取件但未关闭配送箱时,配送箱在开启时间超过其时间限制后关闭,并将配送任务完成信息发送至管理端。
[0029]
一种用于实现上文所述园区无人快递车自动配送方法的园区无人快递车自动配送装置,该装置包括管理端、储物柜、园区门禁、客户端以及若干无人快递配送车;其中管理端通过电缆与园区门禁连接,管理端通过无线网络与客户端及所有无人快递配送车连接;无人快递配送车设置有配送箱以及与配送箱连接的伸缩装置,配送箱内设置有用于识别快递的传感器。
[0030]
按上述方案,该装置还包括通过电缆与管理端连接的电梯。
[0031]
按上述方案,每个无人快递配送车具有互不相同的无人快递配送车编号。
[0032]
按上述方案,储物柜具有能够识别无人快递配送车编号的传感器。
[0033]
按上述方案,客户端及所有无人快递配送车通过蜂窝网络uu接口与管理端进行无线通讯。
[0034]
本发明的有益效果是:通过管理端、储物柜以及无人快递配送车,实现了对快递的存储和运输,解决了封闭式管理园区内快递员无法送货上门的问题,避免了用户亲自前往
储物柜进行取件;在非封闭管理园区内采用该装置,可以降低快递员的工作负担,减少人员接触,降低传染病的传播风险。
附图说明
[0035]
图1为本发明一实施例的园区无人快递车自动配送装置结构图;
[0036]
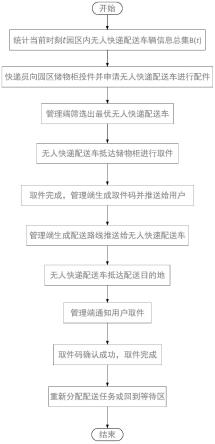
图2为本发明一实施例的园区无人快递车自动配送方法流程图;
[0037]
图3为本发明一实施例的用户网上购物流程图;
[0038]
图4为本发明一实施例的无人快递车筛选流程图。
具体实施方式
[0039]
为使本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本公开保护的范围。
[0040]
参见图1,一种园区无人快递车自动配送装置,该装置包括管理端、储物柜、园区门禁、客户端以及若干无人快递配送车;其中管理端通过电缆与园区门禁连接,管理端通过无线网络与客户端及所有无人快递配送车连接;无人快递配送车设置有配送箱以及与配送箱连接的伸缩装置,配送箱内设置有用于识别快递的传感器。
[0041]
进一步地,该装置还包括通过电缆与管理端连接的电梯。
[0042]
进一步地,每个无人快递配送车具有互不相同的无人快递配送车编号。
[0043]
进一步地,储物柜具有能够识别无人快递配送车编号的传感器。
[0044]
进一步地,客户端及所有无人快递配送车通过蜂窝网络uu接口与管理端进行无线通讯。
[0045]
参见图2~图4,一种利用上文所述的园区无人快递车自动配送装置实现的园区无人快递车自动配送方法,包括以下步骤,
[0046]
s1、用户通过客户端完成线上购物后,快递员将快递存放至储物柜;
[0047]
s2、管理端向客户端发送取件通知,用户通过客户端选择配送端的配送时间;
[0048]
s3、管理端通过无线网络收集所有无人快递配送车的状态信息,生成信息总集;
[0049]
s4、管理端根据信息总集及配送时间选择预计配送时间最短的无人快递配送车;
[0050]
s5、被选定的无人快递配送车运动至储物柜,将储物柜中存放的快递取出;
[0051]
s6、管理端根据用户地址和当前无人快递配送车位置进行路径规划,并生成取件码发送至客户端;
[0052]
s7、无人快递配送车根据规划的路径将快递运至用户位置,期间管理端控制路径中的门禁的开启/关闭以及电梯的运行;
[0053]
s8、管理端向客户端发送取件通知,用户根据取件码进行取件;
[0054]
s9、无人快递配送车完成配送作业后,若收到管理端分配的新的配送任务,则执行s5~s8所述步骤;否则由管理端为其规划路径使其回到等待区域。
[0055]
进一步地,用户完成线上购物后,快递员根据购物过程中用户提供的用户地址配送至园区,并通过储物柜输入用户地址,随后储物柜将用户地址发送至管理端,管理端控制
储物柜打开柜门,快递员将快递存放至储物柜中并关闭柜门,完成投件。
[0056]
进一步地,s3中信息总集为b(t),t为当前时刻,每一个无人快递配送车的状态信息为b(x)={x,g(x),t(x),z(x),d(x)}∈b(t);
[0057]
其中,x为无人快递配送车编号;g(x)={1,2,3},分别表示无人快递配送车的空闲、损坏以及占用;t(x)为无人快递配送车预计转为空闲状态的时间;
[0058]
z(x)为无人快递配送车在转为空闲状态时的位置到储物柜的距离;d(x)为无人快递配送车在转为空闲状态时,预计运动到储物柜的时间;
[0059][0060]
其中,t0为预测的无人快递配送车从当前时刻转为空闲的时间,δt为管理端根据无人快递配送车的历史运行记录得到的时间误差值。
[0061]
进一步地,s4过程具体为,根据用户选择的配送时间得到配送时间与当前时刻的时间间隔δt,并计算所有无人快递配送车到储物柜的路程s和时间t,其中,
[0062]
s=z(x)
[0063]
t=t(x)+d(x)
[0064]
根据δt和t筛选符合以下条件的无人快递配送车;
[0065]
|t-δt|≤δδ
[0066]
其中,δδ为用户能够容忍的时间误差值;筛选获得无人快递配送车v1、v2…vn
;随后计算上述无人快递配送车到储物柜的距离s1、s2…
sn,并选取到储物柜的距离最小的无人快递配送车。
[0067]
进一步地,s5中无人快递配送车将快递从储物柜中取出的过程具体如下,
[0068]
无人快递配送车接收到管理端分配的配送任务后运动至储物柜,储物柜通过传感器对无人快递车进行识别,并将识别到的无人快递车编号上传至管理端;随后管理端根据该无人快递车的编号确定该无人快递车正在执行的配送任务,并将该无人快递车将要配送的快递所存放的位置发送至储物柜和无人快递车;
[0069]
随后无人快递车运动至所要配送快递存放位置的下方,并通过自身设置的伸缩装置将配送箱抬升至取件位置,并打开配送箱;进而储物柜打开对应的柜门,并通过其储物空间内设置的推出装置将快递推至配送箱内,并关闭柜门;
[0070]
当无人快递车检测到其配送箱内接收到快递后,关闭配送箱并通过伸缩装置降下配送箱。
[0071]
进一步地,执行配送任务的无人快递配送车运行至储物柜准备进行取件时,储物柜通过传感器获取无人快递配送车编号,并将该编号传输至管理端,管理端根据编号控制储物柜打开对应柜门并将快递投放至无人快递配送车的配送箱中;无人快递配送车确认快递放置完毕后关闭配送箱,并继续执行配送任务。
[0072]
进一步地,无人快递配送车在运送快递过程中周期性地将自身位置发送至管理端,管理端根据其位置控制规划路径上的门禁的开启/关闭以及电梯的运行。
[0073]
进一步地,当无人快递车将快递运载至用户门口时,管理端通过远程启动用户门铃提醒用户取件。
[0074]
进一步地,s8中,无人快递配送车设置有配送箱开启时间限制,当用户完成取件但未关闭配送箱时,配送箱在开启时间超过其时间限制后关闭,并将配送任务完成信息发送至管理端。
[0075]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1