一种具有自动导航系统的AGV无人车的制作方法
一种具有自动导航系统的agv无人车
技术领域
1.本实用新型涉及无人车设备技术领域,具体为一种具有自动导航系统的agv无人车。
背景技术:
2.agv是自动导引运输车,agv是装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源,一般可透过电脑来控制其行进路线,以及行为,或利用电磁轨道来设立其行进路线,电磁轨道黏贴於地板上,无人搬运车则依循电磁轨道所带来的讯息进行移动与动作,agv以轮式移动为特征,较之步行、爬行或其它非轮式的移动机器人具有行动快捷、工作效率高、结构简单、可控性强、安全性好等优势,与物料输送中常用的其他设备相比,agv的活动区域无需铺设轨道、支座架等固定装置,不受场地、道路和空间的限制,因此,在自动化物流系统中,最能充分地体现其自动性和柔性,实现高效、经济、灵活的无人化生产,其自动化程度高,由计算机,电控设备,激光反射板等控制,当车间某一环节需要辅料时,由工作人员向计算机终端输入相关信息,计算机终端再将信息发送到中央控制室,由专业的技术人员向计算机发出指令,在电控设备的合作下,这一指令最终被agv接受并执行将辅料送至相应地点。
3.比如公告号为cn 112147999 b的专利文件公开了一种自动驾驶实验agv车辆平台,由环境感知系统感知复杂交通环境的变化;由定位导航系统实现精准定位;由路由器提供可移动的网络数据;由控制决策系统依靠工控机为核心处理器开展各类计算进行实车控制和车辆数据的收发;由路径规划系统主要在电子地图中进行路径规划;由人机交互系统进行工控机的指令输入,以及提供可视化操作界面;由数据传输总线实现车辆实时数据传输;由运动控制系统依靠agv电动车底盘进行执行,控制agv电动车底盘的运动控制。还设计人工接管系统,为遥控器,拥有控制的最高权限,在紧急情况下实现对agv电动车底盘的一键接管。本实用新型是一种低成本、多功能、多平台的自动驾驶实验agv车辆平台。
4.然而该结构在进行实际的自动导航运输操作时,设备核心的元件结构无法得到车体外部的保护操作,一旦agv无人车车体出现突发性的周边撞击问题时,设备的核心雷达元件,极易应外力无法进行缓冲,而传递至雷达表面,造成整体出现震荡,对雷达本身存在一定的危害,严重的撞击力甚至会导致雷达当场无法进行继续运行,需要进行立即维修操作,从而后续的维护成本较大,同时设备整体在进行撞击后,整体由于较好的瞬间锁死结构,车体轮胎部位可能还会打滑动平移,对车体造成二次伤害,不利于日常的使用,因此亟需设计一种具有自动导航系统的agv无人车来解决上述问题。
技术实现要素:
5.本实用新型的目的在于提供一种具有自动导航系统的agv无人车,以解决上述背景技术中提出现有的结构在进行实际的自动导航运输操作时,设备核心的元件结构无法得
到车体外部的保护操作,一旦agv无人车车体出现突发性的周边撞击问题时,设备的核心雷达元件,极易应外力无法进行缓冲,而传递至雷达表面,造成整体出现震荡,对雷达本身存在一定的危害,严重的撞击力甚至会导致雷达当场无法进行继续运行,需要进行立即维修操作,从而后续的维护成本较大,同时设备整体在进行撞击后,整体由于较好的瞬间锁死结构,车体轮胎部位可能还会打滑动平移,对车体造成二次伤害,不利于日常的使用问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种具有自动导航系统的agv无人车,包括agv无人车体,所述agv无人车体表面的中心固定连接有分风架,所述分风架的侧面均匀固定连接有泵机架,所述泵机架的内部设置有吸气泵,所述分风架的顶端固定连接有集气框,所述集气框的表面均匀设置有滤网架,所述集气框的表面固定连接有支撑杆,所述支撑杆的顶端设置有激光雷达,所述集气框的一侧设置有显示器,所述显示器的背部设置有散热板,所述agv无人车体表面的两侧设置有电池组,所述agv无人车体表面的两端设置有毫米波雷达,所述agv无人车体表面的四角固定连接有固轮架,所述agv无人车体的两侧固定连接有防护侧架;
7.前嘴座和驱动架,所述前嘴座与agv无人车体的一端之间固定连接,所述驱动架与agv无人车体的另一端之间固定连接,所述前嘴座远离agv无人车体的一端固定连接有防护前架,所述防护前架的内部设置有第一收缩架,所述第一收缩架正面的两端设置有第一排气槽,所述第一收缩架的背面设置第一折叠气囊,所述第一折叠气囊的背面设置有第一进气阀,所述驱动架远离agv无人车体的一端固定连接有防护后架,所述防护后架与防护前架结构相同,所述驱动架的两侧固定连接有安装轮架,所述安装轮架的内部设置有驱动轮,所述驱动架靠近agv无人车体的一端设置有散热网槽,所述防护后架靠近驱动架的一端设置有第一监测外阀。
8.优选的,所述前嘴座靠近agv无人车体的一端设置有控制器,所述前嘴座的两侧设置有转向轮。
9.优选的,所述防护前架的两端固定连接有卡扣板,所述第一收缩架的两端固定连接有卡扣条。
10.优选的,所述固轮架的内部设置有限位胶框,所述限位胶框的内部设置有管型气囊。
11.优选的,所述固轮架的背部固定连接有输送管,所述输送管的一端设置有阻气阀。
12.优选的,所述防护侧架的内壁固定连接有卡固条,所述防护侧架的内部设置
㕛
第二收缩架,所述第二收缩架的背面设置有第二折叠气囊,所述第二收缩架正面的两端设置有第二排气槽,所述第二折叠气囊的背部设置有第二进气阀。
13.优选的,所述前嘴座的内部设置有第一连通管,所述agv无人车体两侧的内部设置有第二连通管。
14.优选的,所述防护侧架的内部设置有第二监测外阀,所述防护前架的内部设置有第三监测外阀。
15.与现有技术相比,本实用新型的有益效果是:
16.该具有自动导航系统的agv无人车,通过设置的agv无人车体、分风架、吸气泵、集气框、滤网架、防护侧架、前嘴座、驱动架、防护前架、第一收缩架、第一排气槽、第一折叠气囊、防护后架、卡扣板、卡扣条、第二收缩架、第二折叠气囊和第二排气槽,可以实现对agv无
人车体以及表面核心元件进行有效的防碰撞保护操作,在实际的使用过程中,工作人员首先启动agv无人车体整体,使其进行自动导航式的移动运输操作,此时通过依次启动分风架侧面泵机架内部的吸气泵,使其从集气框处进行匀速缓慢的吸气操作,然后在通过分风架将集气框处吸入的气流快速的向agv无人车体的四个方向进行输送操作,在第一连通管和第二连通管的辅助下,气流均匀的进入到agv无人车体两端的防护前架和防护后架以及两侧的防护侧架内部,使得第一收缩架和第二收缩架处于微鼓起状态,此时气流从第一收缩架两端的第一排气槽和第二收缩架两端的第二排气槽处进行匀速的排气操作,保证日常进行有效的保护agv无人车体周边缓冲保护操作,一旦agv无人车体在向前移动过程中,出现紧急碰撞问题时,首先第一收缩架可以向防护前架内部进行压缩操作,当防护前架的第三监测外阀处监测到气压回流时,然后设备就会同时启动所有的吸气泵,使得分风架处进行全力的抽气操作,将气压瞬间提升到最强,然后在较强气压的作用下,卡扣板和卡扣条的连接处会被冲开,第一收缩架内部的第一进气阀进行展开操作,从而对agv无人车体的前嘴座位置进行全面的包覆操作,进行有效的缓冲保护操作,同样采用相同的结构设计的防护后架以及采用类似结构设计的防护侧架整体,均在强气压的冲击下,进行展开保护操作,使得整个防护结构为一个整体设计,快速实现对agv无人车体周边位置的全面防护操作,使得agv无人车体整体碰撞后,保持稳定的保护状态,进而为agv无人车体表面的电池组和毫米波雷达整体进行快速稳定的防护操作,体现了设备设计的实用性。
17.该具有自动导航系统的agv无人车,通过设置的集气框、支撑杆、激光雷达、显示器、散热板、固轮架、驱动架、散热网槽、限位胶框、管型气囊、输送管和阻气阀,进一步提高设备整体的使用效果,在日常的使用过程中,吸气泵启动时可以进行匀速的吸气操作,集气框周边产生高效持续的散热气流,可以将激光雷达、显示器、电池组和毫米波雷达工作产生的热量,快速的吸入到集气框的内部,并且驱动架内部的热量同样可以通过从散热网槽处源源不断的排向集气框内,然后顺着分风架和第一连通管和第二连通管稳定的进入到防护侧架或防护前架内部,根据气流的热胀冷缩,使得带有热量的气流更好的为第一折叠气囊和第二折叠气囊的膨胀提供充实的力量,提供设备稳定散热的同时,还提高第一折叠气囊和第二折叠气囊弹出时的保护效果,同时当第二连通管内部充满强气流后,第二连通管两侧的阻气阀处可以被气流冲开,使得气流快速的沿着输送管进入到固轮架内部,此时固轮架内部的管型气囊内部快速充满气流,在限位胶框的限位下,管型气囊快速将转向轮和驱动轮的轮面进行包覆操作,受到设备整体的快速的抬起,避免设备出现滑动造成二次伤害,为设备提供更加全面的保护,体现了设备设计的全面性。
附图说明
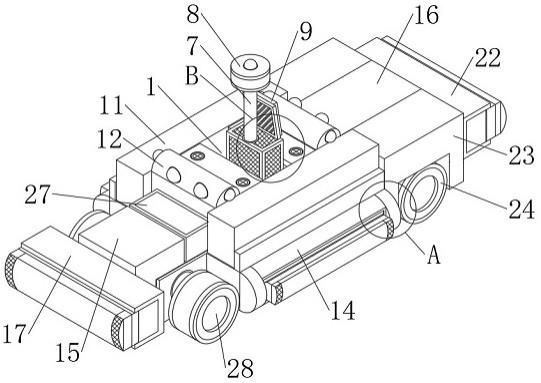
18.图1为本实用新型结构的立体示意图;
19.图2为本实用新型agv无人车体结构的整体示意图;
20.图3为本实用新型防护前架结构的分视示意图;
21.图4为本实用新型固轮架结构的整体示意图;
22.图5为本实用新型防护侧架结构的整体示意图;
23.图6为本实用新型驱动架和防护后架结构的分视示意图;
24.图7为本实用新型图1中a处结构的放大示意图;
25.图8为本实用新型图1中b处结构的放大示意图。
26.图中:1、agv无人车体;2、分风架;3、泵机架;4、吸气泵;5、集气框;6、滤网架;7、支撑杆;8、激光雷达;9、显示器;10、散热板;11、电池组;12、毫米波雷达;13、固轮架;14、防护侧架;15、前嘴座;16、驱动架;17、防护前架;18、第一收缩架;19、第一排气槽;20、第一折叠气囊;21、第一进气阀;22、防护后架;23、安装轮架;24、驱动轮;25、散热网槽;26、第一监测外阀;27、控制器;28、转向轮;29、卡扣板;30、卡扣条;31、限位胶框;32、管型气囊;33、输送管;34、阻气阀;35、卡固条;36、第二收缩架;37、第二折叠气囊;38、第二排气槽;39、第二进气阀;40、第一连通管;41、第二连通管;42、第二监测外阀;43、第三监测外阀。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.请参阅图1-8,本实用新型提供的一种实施例:
29.一种具有自动导航系统的agv无人车,本技术中使用的agv无人车体1、吸气泵4、激光雷达8、显示器9、电池组11、毫米波雷达12、第一折叠气囊20、控制器27、管型气囊32和第二折叠气囊37为市场上可直接购买到的产品,其原理和连接方式均为本领域技术人员熟知的现有技术,包括agv无人车体1,agv无人车体1表面的中心固定连接有分风架2,分风架2的侧面均匀固定连接有泵机架3,泵机架3的内部设置有吸气泵4,分风架2的顶端固定连接有集气框5,集气框5的表面均匀设置有滤网架6,集气框5的表面固定连接有支撑杆7,支撑杆7的顶端设置有激光雷达8,集气框5的一侧设置有显示器9,显示器9的背部设置有散热板10,agv无人车体1表面的两侧设置有电池组11,agv无人车体1表面的两端设置有毫米波雷达12,agv无人车体1表面的四角固定连接有固轮架13,agv无人车体1的两侧固定连接有防护侧架14,固轮架13的内部设置有限位胶框31,限位胶框31的内部设置有管型气囊32,固轮架13的背部固定连接有输送管33,输送管33的一端设置有阻气阀34,防护侧架14的内壁固定连接有卡固条35,防护侧架14的内部设置
㕛
第二收缩架36,第二收缩架36的背面设置有第二折叠气囊37,第二收缩架36正面的两端设置有第二排气槽38,第二折叠气囊37的背部设置有第二进气阀39,吸气泵4启动时可以进行匀速的吸气操作,集气框5周边产生高效持续的散热气流,可以将激光雷达8、显示器9、电池组11和毫米波雷达12工作产生的热量,快速的吸入到集气框5的内部,并且驱动架16内部的热量同样可以通过从散热网槽25处源源不断的排向集气框5内,然后顺着分风架2和第一连通管40和第二连通管41稳定的进入到防护侧架14或防护前架17内部,根据气流的热胀冷缩,使得带有热量的气流更好的为第一折叠气囊20和第二折叠气囊37的膨胀提供充实的力量。
30.前嘴座15和驱动架16,前嘴座15与agv无人车体1的一端之间固定连接,驱动架16与agv无人车体1的另一端之间固定连接,前嘴座15远离agv无人车体1的一端固定连接有防护前架17,防护前架17的内部设置有第一收缩架18,第一收缩架18正面的两端设置有第一排气槽19,第一收缩架18的背面设置第一折叠气囊20,第一折叠气囊20的背面设置有第一进气阀21,驱动架16远离agv无人车体1的一端固定连接有防护后架22,防护后架22与防护
前架17结构相同,驱动架16的两侧固定连接有安装轮架23,安装轮架23的内部设置有驱动轮24,驱动架16靠近agv无人车体1的一端设置有散热网槽25,防护后架22靠近驱动架16的一端设置有第一监测外阀26,前嘴座15靠近agv无人车体1的一端设置有控制器27,前嘴座15的两侧设置有转向轮28,防护前架17的两端固定连接有卡扣板29,第一收缩架18的两端固定连接有卡扣条30,前嘴座15的内部设置有第一连通管40,agv无人车体1两侧的内部设置有第二连通管41,防护侧架14的内部设置有第二监测外阀42,防护前架17的内部设置有第三监测外阀43,一旦agv无人车体1在向前移动过程中,出现紧急碰撞问题时,首先第一收缩架18可以向防护前架17内部进行压缩操作,当防护前架17的第三监测外阀43处监测到气压回流时,然后设备就会同时启动所有的吸气泵4,使得分风架2处进行全力的抽气操作,将气压瞬间提升到最强,然后在较强气压的作用下,卡扣板29和卡扣条30的连接处会被冲开,第一收缩架18内部的第一进气阀21进行展开操作,从而对agv无人车体1的前嘴座15位置进行全面的包覆操作,进行有效的缓冲保护操作,同样采用相同的结构设计的防护后架22以及采用类似结构设计的防护侧架14整体,均在强气压的冲击下,进行展开保护操作。
31.工作原理:使用时,使用人员首先启动agv无人车体1整体,使其进行自动导航式的移动运输操作,此时通过依次启动分风架2侧面泵机架3内部的吸气泵4,使其从集气框5处进行匀速缓慢的吸气操作,然后在通过分风架2将集气框5处吸入的气流快速的向agv无人车体1的四个方向进行输送操作,在第一连通管40和第二连通管41的辅助下,气流均匀的进入到agv无人车体1两端的防护前架17和防护后架22以及两侧的防护侧架14内部,使得第一收缩架18和第二收缩架36处于微鼓起状态,此时气流从第一收缩架18两端的第一排气槽19和第二收缩架36两端的第二排气槽38处进行匀速的排气操作,保证日常进行有效的保护agv无人车体1周边缓冲保护操作,一旦agv无人车体1在向前移动过程中,出现紧急碰撞问题时,首先第一收缩架18可以向防护前架17内部进行压缩操作,当防护前架17的第三监测外阀43处监测到气压回流时,然后设备就会同时启动所有的吸气泵4,使得分风架2处进行全力的抽气操作,将气压瞬间提升到最强,然后在较强气压的作用下,卡扣板29和卡扣条30的连接处会被冲开,第一收缩架18内部的第一进气阀21进行展开操作,从而对agv无人车体1的前嘴座15位置进行全面的包覆操作,进行有效的缓冲保护操作,同样采用相同的结构设计的防护后架22以及采用类似结构设计的防护侧架14整体,均在强气压的冲击下,进行展开保护操作,使得整个防护结构为一个整体设计,快速实现对agv无人车体1周边位置的全面防护操作,使得agv无人车体1整体碰撞后,保持稳定的保护状态,进而为agv无人车体1表面的电池组11和毫米波雷达12整体进行快速稳定的防护操作,在日常的使用过程中,吸气泵4启动时可以进行匀速的吸气操作,集气框5周边产生高效持续的散热气流,可以将激光雷达8、显示器9、电池组11和毫米波雷达12工作产生的热量,快速的吸入到集气框5的内部,并且驱动架16内部的热量同样可以通过从散热网槽25处源源不断的排向集气框5内,然后顺着分风架2和第一连通管40和第二连通管41稳定的进入到防护侧架14或防护前架17内部,根据气流的热胀冷缩,使得带有热量的气流更好的为第一折叠气囊20和第二折叠气囊37的膨胀提供充实的力量,提供设备稳定散热的同时,还提高第一折叠气囊20和第二折叠气囊37弹出时的保护效果,同时当第二连通管41内部充满强气流后,第二连通管41两侧的阻气阀34处可以被气流冲开,使得气流快速的沿着输送管33进入到固轮架13内部,此时固轮架13内部的管型气囊32内部快速充满气流,在限位胶框31的限位下,管型气囊32快速将
转向轮28和驱动轮24的轮面进行包覆操作,受到设备整体的快速的抬起,避免设备出现滑动造成二次伤害,以上为本实用新型的全部工作原理。
32.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1