一种工业用多足稳定运输机器人的制作方法
1.本实用新型属于工业运输机器人技术领域,尤其涉及一种工业用多足稳定运输机器人。
背景技术:
2.工业运输是指工业企业为组织生产、再生产所进行的各种运输。按其活动范围可分为厂外运输和厂内运输。前者指企业与外单位之间的运输活动;后者指企业内部直接为生产过程服务的运输活动。按物料移动方向,可分为水平运输(如传送带运输)、垂直运输(如升降机运输)、水平垂直运输(如行车运输);按运输的连续与否,可分为连续性运输(如管道输送)、间断性运输(如手推车运输)。
3.在现有技术中,目前的工业运输机器人大多为双足运输,然而这种运输机器人在运输较重货物或复杂路况时极易出现颠簸或货物摔落,稳定性欠缺。
技术实现要素:
4.本实用新型提供一种工业用多足稳定运输机器人,旨在解决目前的工业运输机器人稳定性欠缺的问题。
5.本实用新型是这样实现的,一种工业用多足稳定运输机器人,包括机盘,其特征在于,所述机盘外端设置有连接端片,所述连接端片下端设置有第一电缸,所述第一电缸外端设置有第一电机,所述第一电机前端设置有固定架,所述固定架内设置有第二电机,所述第二电机下方设置有第二电缸,所述第一电机、所述第二电机、所述第一电缸和所述第二电缸与外部电源及外部控制器电连接,并受外部控制器控制。
6.更进一步地,所述机盘上端中央设置有连接盘,所述连接盘中央设置有定位盘。
7.更进一步地,所述第一电缸上端设置有第一伸缩杆,所述第一伸缩杆上端设置于所述连接端片内,所述第一电缸外端设置有连接架,所述连接架外端设置有所述第一电机。
8.更进一步地,所述第一电机右端设置有第一转轴,所述第一转轴外端设置有第一连接环。
9.更进一步地,所述第一连接环设置于第一摇臂内侧,所述第一摇臂前端设置有第二摇臂,所述第二摇臂与所述第一摇臂连接处设置有第一定位轴。
10.更进一步地,所述第二摇臂外侧设置有第二连接环,所述第二连接环设置于第二转轴外端,所述第二转轴设置于所述第二电机右端。
11.更进一步地,所述第二电缸上端设置有第二伸缩杆,所述第二电缸与所述固定架连接处设置有底座。
12.更进一步地,所述第二伸缩杆和所述底座外端均设置有缓冲轴,所述缓冲轴间设置有弹簧。
13.更进一步地,所述第二伸缩杆前端设置有连杆,所述连杆前端设置有机器脚,所述连杆与所述第二伸缩杆和所述机器脚连接处均设置有连接座。
14.所述机器脚上设置有第三摇臂,所述第三摇臂与所述机器脚底部连接处设置有第四摇臂,所述第三摇臂和所述第四摇臂连接处设置有第二定位轴且所述第二定位轴设置于底座上。
15.关于实施本实用新型的有益技术效果为:首先,由于本实用新型设置了第一连接环、第二连接环、第一摇臂、第二摇臂和第一定位轴,使得本实用新型在运输时可通过改变第一摇臂和第二摇臂夹角降低本实用新型重心,提高了本实用新型的稳定性;其次,由于本实用新型设置了机盘、连接端片、连接架和固定架,使得本实用新型在载物时通过机盘下的多个固定架分散压力,提高了本实用新型的实用性。
附图说明
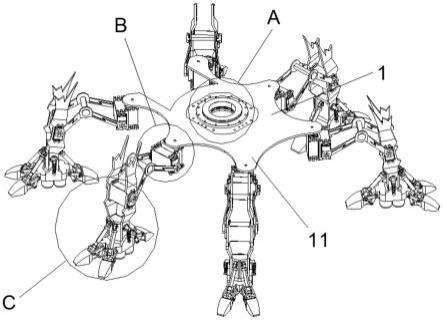
16.图1是本实用新型的整体结构示意图;
17.图2是本实用新型的附图1中a处局部视图;
18.图3是本实用新型的附图1中b处局部视图;
19.图4是本实用新型的附图1中c处局部视图;
20.图5是本实用新型的附图4中d处局部视图;
21.图中:1、机盘;11、连接端片;12、连接盘;13、定位盘;2、第一电缸;21、第一伸缩杆;22、连接架;23、第一电机;24、第一转轴;3、第一定位轴;31、第一摇臂;32、第一连接环;33、第二摇臂;34、第二连接环;4、固定架;41、第二电机;42、第二转轴;43、底座;5、第二电缸;51、第二伸缩杆;52、缓冲轴;53、弹簧;6、连杆;61、连接座;62、机器脚;63、第三摇臂;64、第四摇臂;65、第二定位轴。
具体实施方式
22.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
23.参照图1-图5,本实用新型为一种工业用多足稳定运输机器人,包括机盘1,其特征在于,机盘1外端设置有连接端片11,连接端片11下端设置有第一电缸2,第一电缸2外端设置有第一电机23,第一电机23前端设置有固定架4,固定架4内设置有第二电机41,第二电机41下方设置有第二电缸5,第一电机23、第二电机41、第一电缸2和第二电缸5与外部电源及外部控制器电连接,并受外部控制器控制。
24.机盘1上端中央设置有连接盘12,连接盘12中央设置有定位盘13,便于机盘1与货物连接固定。
25.第一电缸2上端设置有第一伸缩杆21,第一伸缩杆21上端设置于连接端片11内,第一电缸2外端设置有连接架22,连接架22外端设置有第一电机23,便于带动连接端片11升降。
26.第一电机23右端设置有第一转轴24,第一转轴24外端设置有第一连接环32,便于带动第一连接环32运动。
27.第一连接环32设置于第一摇臂31内侧,第一摇臂31前端设置有第二摇臂33,第二摇臂33与第一摇臂31连接处设置有第一定位轴3,便于固定第一摇臂31和第二摇臂33。
28.第二摇臂33外侧设置有第二连接环34,第二连接环34设置于第二转轴42外端,第二转轴42设置于第二电机41右端,便于带动第二连接环34运动。
29.第二电缸5上端设置有第二伸缩杆51,第二电缸5与固定架4连接处设置有底座43,便于带动第二伸缩杆51升降。
30.第二伸缩杆51和底座43外端均设置有缓冲轴52,缓冲轴52间设置有弹簧53,使得第二伸缩杆51缓慢升降并回落。
31.第二伸缩杆51前端设置有连杆6,连杆6前端设置有机器脚62,连杆6与第二伸缩杆51和机器脚62连接处均设置有连接座61,便于带动机器脚62运动。
32.机器脚62上设置有第三摇臂63,第三摇臂63与机器脚62底部连接处设置有第四摇臂64,第三摇臂63和第四摇臂64连接处设置有第二定位轴65且第二定位轴65设置于底座43上。
33.本实用新型的工作原理为:使用本实用新型时,先启动第一电缸2,第一电缸2带动第一伸缩杆21收缩,第一伸缩杆21带动机盘1下降,再将待运输货物通过定位盘13与机盘1固定后机盘1升高;当本实用新型运输货物质量提高时,第一电机23和第二电机41分别带动第一转轴24和第二转轴42旋转,第一转轴24和第二转轴42分别通过第一连接环32和第二连接环34带动第一摇臂31和第二摇臂33间夹角增大,固定架4向外倾斜,机盘重心降低;第二电缸5带动第二伸缩杆51升降,第二伸缩杆51升降过程中带动机器脚62运动完成运输。
34.关于实施本实用新型的有益技术效果为:首先,由于本实用新型设置了第一连接环32、第二连接环34、第一摇臂31、第二摇臂33和第一定位轴3,使得本实用新型在运输时可通过改变第一摇臂31和第二摇臂33夹角降低本实用新型重心,提高了本实用新型的稳定性;其次,由于本实用新型设置了机盘1、连接端片11、连接架22和固定架4,使得本实用新型在载物时通过机盘1下的多个固定架4分散压力,提高了本实用新型的实用性。
35.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1