一种应对多领域复杂环境的机器人的制作方法
本技术涉及机器人,尤其是涉及一种应对多领域复杂环境的机器人。
背景技术:
1、随着科学技术的发展和人文社会的进步,国家和各行业领域对卫生、安全等方面的要求也逐步提高。人工智能技术的飞速突破,使得机器人走进工业及民用相关领域,尤其是应对恶劣的高温、高腐蚀、易燃、易爆等高危环境,机器人的参与,有效降低了人身安全风险和企业财产损失,并且大幅提升了企业职业健康安全水平和国民生活水准。然而,机器人应对复杂环境的能力并没有跟上高速发展的感知、探测、识别等内在智能技术的脚步,时常会因为在复杂环境中发生物理性意外而丧失了本身搭载的智能模块应发挥出的功能。同时,机器人的物理结构平台的多样化,从另一个角度间接地限制了人工智能进一步应用推广的步伐。
技术实现思路
1、针对现有技术存在的问题,本实用新型提供一种应对多领域复杂环境的机器人,能够在面临任何复杂环境和突发外来冲击时,仍旧保持或迅速恢复物理站立姿态,实现在多领域复杂环境中稳定灵活行进、越障、自平衡,保证所搭载的智能模块完成既定任务,提高了机器人应对多领域复杂环境的机动性及工作的安全性与效率。
2、本实用新型的技术方案为:
3、一种应对多领域复杂环境的机器人,其特征在于,包括承载平台、行走机构、驱动传动机构,所述驱动传动机构设置在所述承载平台内,所述承载平台与所述行走机构相对活动,所述驱动传动机构与所述行走机构传动连接,所述应对多领域复杂环境的机器人的除行走机构之外的部分的重心高度低于所述承载平台的几何中心高度。
4、进一步的,所述重心在所述几何中心的正下方。
5、进一步的,所述承载平台的整体外观的包络面形状为球体或椭球体或胶囊体或卵形体。
6、进一步的,所述承载平台与所述行走机构之间齿轮啮合连接或滚动连接或辐轮式连接或磁悬浮非接触连接。
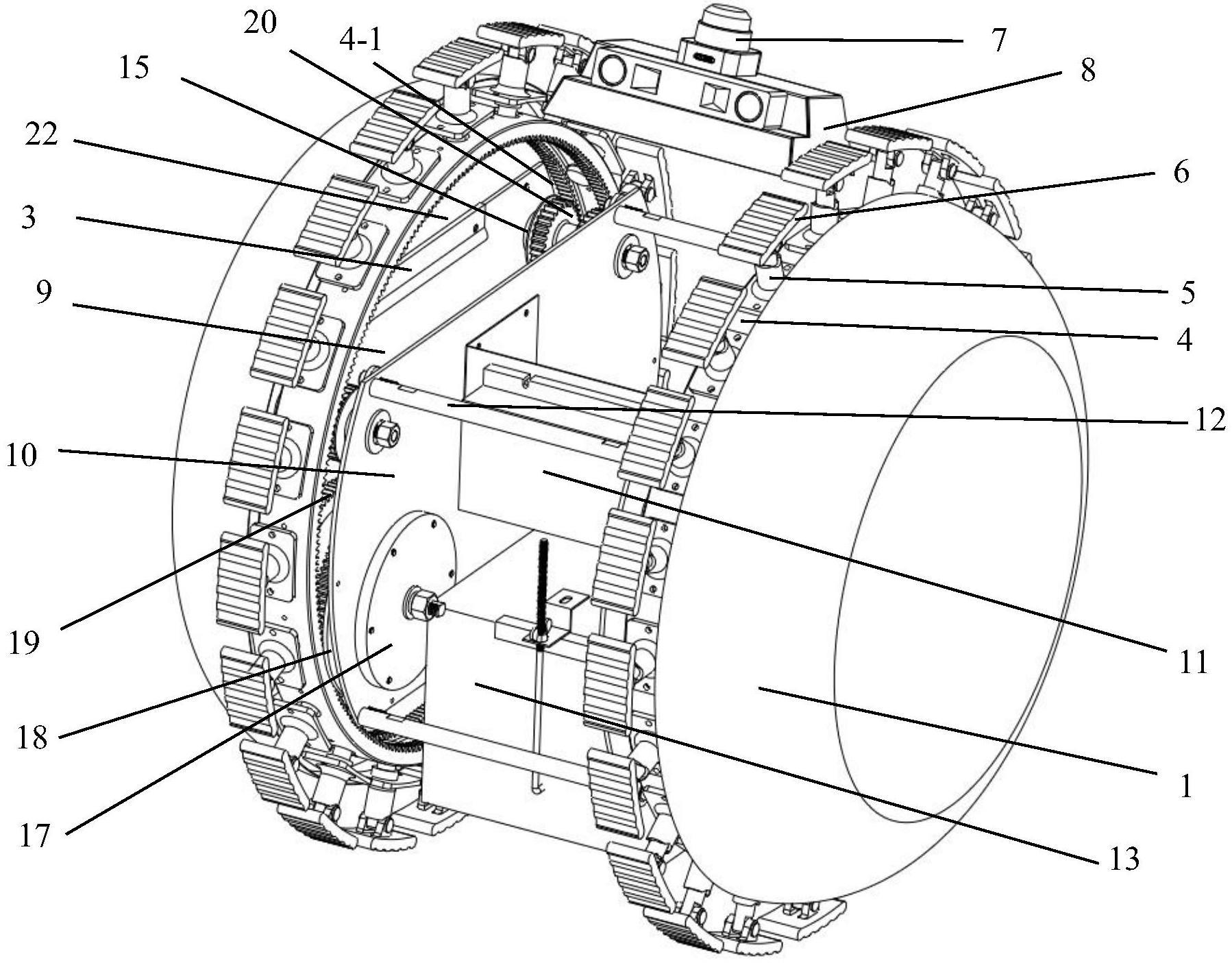
7、进一步的,所述承载平台包括中间壳体2、两个对称设置在中间壳体2两侧的端部壳体1;所述行走机构包括两个对称设置的行走轮,两个所述行走轮分别设置在中间壳体2的两端与对应侧端部壳体1之间,所述中间壳体2的两端分别与对应侧端部壳体1之间固定连接,两个所述行走轮之间转动连接。
8、进一步的,所述行走轮包括支撑环4,所述支撑环4的内侧壁开设有内轮齿4-1;所述驱动传动机构包括两个分别用于驱动两个所述行走轮的驱动传动组件,所述驱动传动组件包括无刷电机18、外齿轮19,所述无刷电机18的外壳与所述外齿轮19的中心孔固定连接,所述外齿轮19与所述支撑环4啮合,所述无刷电机18电连接有控制器。
9、进一步的,所述承载平台还包括密封组件、支撑组件;所述密封组件包括两个第一密封板22、两个第二密封板,所述支撑组件包括两个第一支撑板9、两个第二支撑板10、多个支撑杆12、至少两个连接轴15、与连接轴15数量相同的从动齿轮20;所述中间壳体2的两端敞开,所述端部壳体1的靠近中间壳体2的一端敞开、远离中间壳体2的一端封闭;两个第一密封板22分别固定在两个端部壳体1敞开一端的端面,两个第一支撑板9分别固定在两个第一密封板22的外侧壁,每个端部壳体1与对应的第一密封板22、第一支撑板9形成第一密封腔14;两个第二密封板分别固定在中间壳体2两端的端面,两个第二支撑板10分别固定在两个第二密封板的外侧壁,中间壳体2与两个第二密封板、两个第二支撑板10形成第二密封腔;每个第二支撑板10与对应侧的第一支撑板9之间通过至少一个连接轴15固定连接,两个第二支撑板10之间通过多个支撑杆12固定连接;所述无刷电机18的定子轴在两端分别与对应的第一支撑板9、第二支撑板10固定连接,所述从动齿轮20套在对应的连接轴15上,所述从动齿轮20与所述支撑环4啮合。
10、进一步的,所述内轮齿4-1有至少两圈,所述外齿轮19上设置有与所述内轮齿4-1圈数相同的第一外轮齿,所述从动齿轮20上设置有与所述内轮齿4-1圈数相同的第二外轮齿,每两圈内轮齿4-1相互平行,每圈第一外轮齿与对应的一圈内轮齿4-1啮合,每圈第二外轮齿与对应的一圈内轮齿4-1啮合。
11、进一步的,所述密封组件还包括两个第一定位卡3、两个第二定位卡,两个第一定位卡3分别固定在两个第一密封板22的外侧壁,两个第二定位卡分别固定在两个第二密封板的外侧壁,所述第一定位卡3、第二定位卡均在底端开设有定位槽,每个第一支撑板9在顶端卡在对应第一定位卡3的定位槽内并与第一定位卡3通过螺钉连接,每个第二支撑板10在顶端卡在对应第二定位卡的定位槽内并与第二定位卡通过螺钉连接。
12、进一步的,所述第一密封板22、第二密封板均在中部开设有检查孔;所述第一密封腔14、第二密封腔内填充有防震材料、防静电材料、磁性屏蔽材料、隔热材料、隔水材料中的一种或几种。
13、进一步的,还包括电源13、控制柜16;所述控制柜16的背板11、所述电源13固定在所述支撑杆12上或所述第二支撑板10的内侧壁,所述控制器设置在所述控制柜16内。
14、进一步的,所述中间壳体2的外侧壁顶端设置有安装架8,所述安装架8在顶端设置有视频采集装置7,所述视频采集装置7与所述控制器连接;所述中间壳体2的内部设置有救援仓。
15、进一步的,所述支撑环4的外侧壁沿周向均匀设置有多个支撑腿5,所述支撑腿5的尾端设置有支撑脚6。
16、进一步的,所述支撑环4的外侧壁沿周向均匀开设有多个支撑腿安装孔4-2;所述支撑腿5包括套筒5-1、伸缩杆5-2、弹簧5-3;所述套筒5-1从尾端到首端依次包括第一轴段、安装板、第二轴段,所述安装板的宽度大于所述支撑腿安装孔4-2的内径且大于所述第一轴段的直径,所述第二轴段设置在所述支撑腿安装孔4-2内,所述安装板与所述支撑环4之间固定连接;所述套筒5-1内开设有与所述套筒5-1共轴的伸缩杆安装孔,所述伸缩杆5-2从尾端到首端依次包括第三轴段、直径大于伸缩杆安装孔内径的第四轴段,所述第三轴段从所述支撑环4的内侧穿入所述伸缩杆安装孔并伸出所述伸缩杆安装孔;所述支撑脚6在首端端面设置有两个相互平行的安装边6-1,所述第三轴段的尾端伸入两个所述安装边6-1之间,所述第三轴段与两个所述安装边6-1之间通过销轴5-4转动连接;所述弹簧5-3套设在所述第一轴段上并在两端分别抵靠在所述安装板的尾端端面与所述支撑脚6的首端端面。
17、进一步的,所述支撑脚6为扁平板状或球状或弧形板状或船桨板状。
18、本实用新型的有益效果为:
19、(1)本实用新型通过设置几何中心高度高于机器人的除行走机构之外部分的重心高度的承载平台、设置与承载平台相对活动的行走机构、设置与行走机构传动连接的驱动传动机构,使得机器人类似不倒翁,实现机器人在面临任何复杂环境和突发外来冲击时,仍旧能够保持或迅速恢复物理站立姿态,不影响所搭载的智能模块完成既定任务,解决了现有机器人容易在复杂环境中发生物理性意外而丧失搭载的智能模块应发挥的功能的技术问题,提高了机器人应对多领域复杂环境的机动性及工作的安全性与效率。本实用新型还优选了承载平台的整体外观的包络面形状为球体或椭球体或胶囊体或卵形体,能够进一步提高机器人的自平衡效果,还优选了承载平台与行走机构之间的连接方式为齿轮啮合连接或滚动连接或辐轮式连接或磁悬浮非接触连接,能够进一步提高承载平台对行走机构的支撑效果同时提高行走机构相对承载平台的活动性能,提高机器人应对多领域复杂环境的能力。
20、(2)本实用新型通过设置包括中间壳体、端部壳体的承载平台并在中间壳体两端与对应侧端部壳体之间设置行走轮,能够同时提高机器人的自平衡效果与行走机构的行走稳定性,进一步提高机器人应对多领域复杂环境的能力。
21、(3)本实用新型通过在行走轮中支撑环的内侧壁开设内轮齿使得支撑环形成内齿轮、在驱动传动组件中设置与无刷电机固定连接的外齿轮同支撑环啮合,能够实现动力向行走轮的稳定传递,提高机器人运行的稳定性。
22、(4)本实用新型通过在承载平台的密封组件中设置密封板、支撑组件中设置支撑板、支撑杆及连接轴,实现中间壳体同端部壳体之间的稳定连接,通过在连接轴上设置从动齿轮与支撑环啮合,实现对行走轮的稳定支撑,通过中间壳体、端部壳体、密封组件、支撑组件、驱动传动组件与行走轮的配合,能够将驱动、传动、平衡机理有机结合,使得机器人具备行进、越障、自平衡等功能,进一步提升机器人运行过程中的稳定性,大大降低机器人在面临复杂环境和突发外来冲击时物理性意外如倾斜与侧翻发生的几率,使得物理站立姿态保持或迅速恢复,而且能够实现特定领域内不同功能机器人外形的统一化。
23、(5)本实用新型通过根据需求设置支撑环内侧壁内轮齿、驱动传动组件中外齿轮上外轮齿及连接轴上从动齿轮上外轮齿的圈数,能够进一步提升动力传递的稳定性及对行走轮支撑的稳定性,大大提高机器人运行的稳定性。
24、(6)本实用新型通过端部壳体、中间壳体均与密封组件中对应的密封板、支撑组件中对应的支撑板之间形成密封腔,使得控制平台处于封闭腔内部,能够防止外界气、水、固体颗粒等物质进入机器人内部以危害系统,还能够通过封闭组件侧的拆解对机器人内部结构进行维护,提高机器人运行的安全性与使用寿命,通过在密封腔内部填充各种功能材料,使得机器人具备防震、防撞击、缓冲、消除静电、屏蔽磁场、隔热、防水等功能,提升机器人应对多领域复杂环境的能力。
25、(7)本实用新型通过在密封板上设置定位卡,实现对支撑板在密封板上安装时的定位,能够提高安装的准确性与机器人的密封性能。
26、(8)本实用新型通过将控制柜的背板、电源固定在支撑杆上或第二支撑板的内侧壁,能够起到对承载平台的配重作用,提升承载平台的平衡性。
27、(9)本实用新型通过在中间壳体内部设置救援仓及在顶端安装架上设置视频采集装置,使得机器人能够在多领域复杂环境中根据需求配置救援系统或根据采集的视频分析环境情况,提高机器人应对多领域复杂环境的能力。
28、(10)本实用新型通过在支撑环的周向均匀设置支撑腿与支撑脚,能够承载机器人的自重及各方向外来的压力,配合驱动传动机构,能够使得机器人整体稳定、行进、翻越、停止。
29、(11)本实用新型通过在行走轮中设置与支撑环固连的套筒、从支撑环内侧伸入套筒内且在尾端与支撑脚转动连接的伸缩杆、套设在套筒上安装板与支撑脚之间的弹簧,形成可伸缩的支撑腿、可相对支撑腿转动的支撑脚,能够提升机器人行走过程中的平稳性与灵活性,而且本实用新型针对不同领域复杂环境设计支撑脚的形状为扁平板状或球状或弧形板状或船桨板状,使得机器人能够在楼梯、沙地、水下等多领域复杂环境中稳定行走,提高机器人应对多领域复杂环境的能力。
- 还没有人留言评论。精彩留言会获得点赞!