车辆EPS控制器的冗余控制方法、装置、车辆及介质与流程
本技术涉及汽车,特别涉及一种车辆eps控制器的冗余控制方法、装置、车辆及介质。
背景技术:
1、随着车辆电子技术的快速发展和自动驾驶诉求的提高,在车辆使用过程中,提高车辆转向控制系统的安全等级愈发重要,因此,为了满足新的转向控制系统,即线控转向系统的开发,需要进一步提高eps(electric power steering,电动助力转向)控制器以及ecu(electronic control unit,电子控制单元)的安全等级和失效冗余能力,从而提高车辆的转向控制安全等级,使其能够满足l3及以上的驾驶安全等级。
2、相关技术中,大多使用双冗余转向控制器,如转向系统fit10控制器,以实现车辆的转向控制。
3、然而,双冗余控制器的功能安全等级较低,无法满足l3及以上的驾驶安全等级,并且其失效冗余能力较差,在某一路控制模块失效时,易影响另外一路模块的输出助力,从而会导致车辆自动驾驶出现安全问题,亟需解决。
4、申请内容
5、有鉴于此,本技术旨在提出一种车辆eps控制器的冗余控制方法,该方法解决了相关技术中双冗余形式的控制单元功能安全等级较低,失效冗余能力较差,从而易影响控制器助力的正常输出等问题,通过采用多冗余形式的控制单元,以提高车辆控制单元的失效容错机制及安全等级,进而保障车辆的正常安全行驶。
6、为达到上述目的,本技术的技术方案是这样实现的:
7、一种车辆eps控制器的冗余控制方法,所述eps控制器包括第一控制单元、第二控制单元和冗余控制单元,其中,所述方法包括以下步骤:
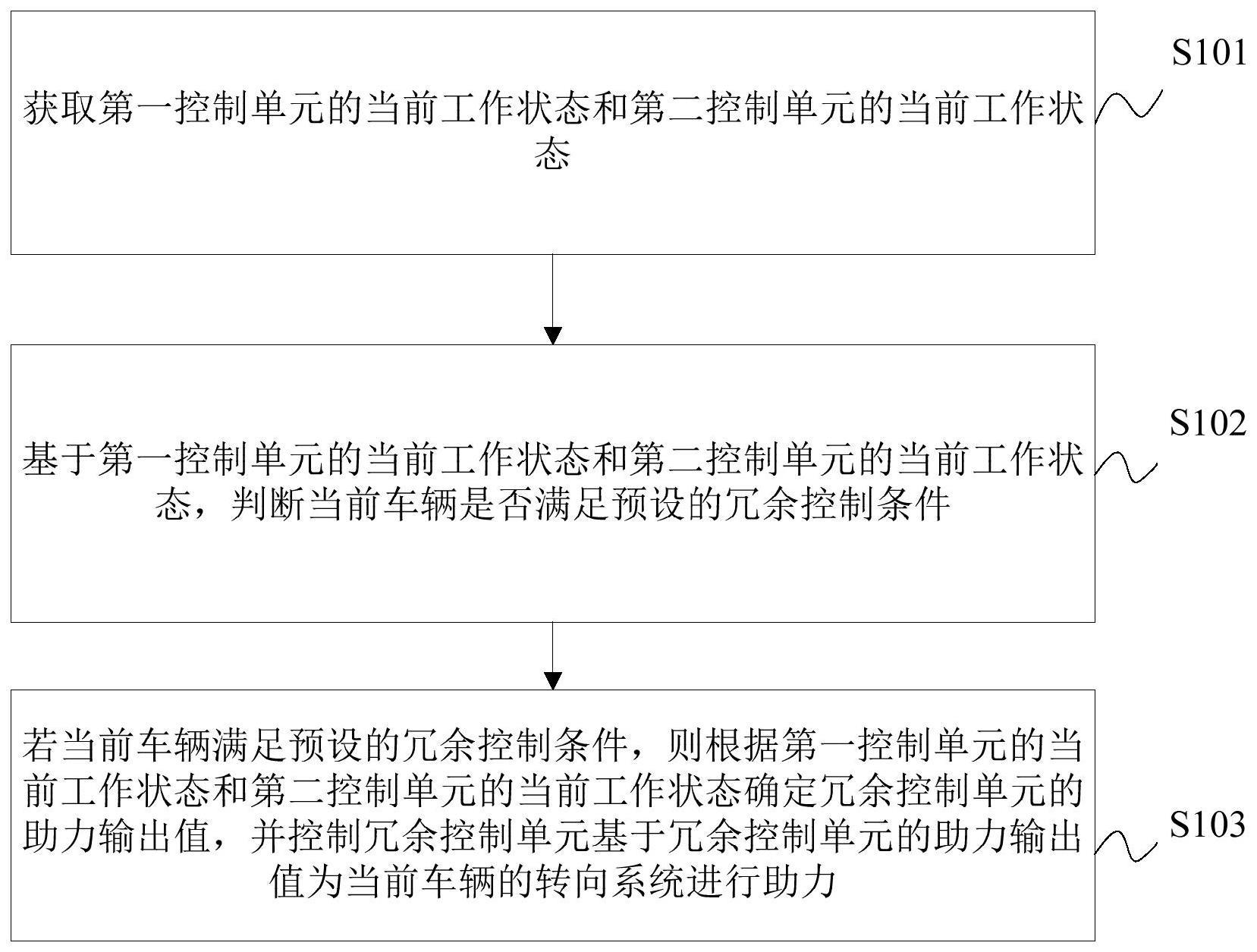
8、获取所述第一控制单元的当前工作状态和所述第二控制单元的当前工作状态;
9、基于所述第一控制单元的当前工作状态和所述第二控制单元的当前工作状态,判断当前车辆是否满足预设的冗余控制条件;以及
10、若所述当前车辆满足所述预设的冗余控制条件,则根据所述第一控制单元的当前工作状态和所述第二控制单元的当前工作状态确定所述冗余控制单元的助力输出值,并控制所述冗余控制单元基于所述冗余控制单元的助力输出值为所述当前车辆的转向系统进行助力。
11、进一步地,所述基于所述第一控制单元的当前工作状态和所述第二控制单元的当前工作状态,判断当前车辆是否满足预设的冗余控制条件,包括:
12、基于所述第一控制单元的当前工作状态,判断所述第一控制单元的助力输出值是否小于第一预设阈值;
13、和/或,基于所述第二控制单元的当前工作状态,判断所述第二控制单元的助力输出值是否小于第二预设阈值;
14、若所述第一控制单元的助力输出值小于所述第一预设阈值,和/或所述第二控制单元的助力输出值小于所述第二预设阈值,则判定所述当前车辆满足所述预设的冗余控制条件。
15、进一步地,所述根据所述第一控制单元的当前工作状态和所述第二控制单元的当前工作状态确定所述冗余控制单元的助力输出值,包括:
16、若所述第一控制单元的助力输出值小于所述第一预设阈值,且所述第二控制单元的助力输出值不小于所述第二预设阈值,则根据所述转向系统的总需求助力值和所述第二控制单元的助力输出值确定所述冗余控制单元的助力输出值的第一结果;
17、若所述第一控制单元的助力输出值不小于所述第一预设阈值,且所述第二控制单元的助力输出值小于所述第二预设阈值,则根据所述转向系统的总需求助力值和所述第一控制单元的助力输出值确定所述冗余控制单元的助力输出值的第二结果;
18、若所述第一控制单元的助力输出值小于所述第一预设阈值,且所述第二控制单元的助力输出值小于所述第二预设阈值,则根据所述转向系统的总需求助力值确定所述冗余控制单元的助力输出值的第三结果。
19、进一步地,在判定所述第一控制单元的助力输出值小于所述第一预设阈值后,所述控制所述冗余控制单元基于所述冗余控制单元的助力输出值为所述当前车辆的转向系统进行助力,包括:
20、断开所述第一控制单元对应的第一相保护开关和第一三相驱动电路的同时,控制所述冗余控制单元对应的第二相保护开关和第二三相驱动电路闭合;
21、基于所述第一结果,控制所述冗余控制单元代替所述第一控制单元为所述当前车辆的转向系统进行助力。
22、进一步地,在判定所述第二控制单元的助力输出值小于所述第二预设阈值后,所述控制所述冗余控制单元基于所述冗余控制单元的助力输出值为所述当前车辆的转向系统进行助力,包括:
23、断开所述第二控制单元对应的第三相保护开关和第三三相驱动电路的同时,控制所述冗余控制单元对应的第四相保护开关和第四三相驱动电路闭合;
24、基于所述第二结果,控制所述冗余控制单元代替所述第二控制单元为所述当前车辆的转向系统进行助力。
25、进一步地,在判定所述第一控制单元的助力输出值小于所述第一预设阈值,且判定所述第二控制单元的助力输出值小于所述第二预设阈值后,所述控制所述冗余控制单元基于所述冗余控制单元的助力输出值为所述当前车辆的转向系统进行助力,包括:
26、断开第一相保护开关、第一三相驱动电路、第三相保护开关和第三三相驱动电路的同时,控制第二相保护开关、第二三相驱动电路、第四相保护开关和第四三相驱动电路闭合;
27、基于所述第三结果,控制所述冗余控制单元代替所述第一控制单元和所述第二控制单元为所述当前车辆的转向系统进行助力。
28、本技术实施例的车辆eps控制器的冗余控制方法,通过获取第一控制单元和第二控制单元的当前工作状态,基于第一控制单元和第二控制单元的当前工作状态,在当前车辆满足预设的冗余控制条件时根据第一控制单元和第二控制单元的当前工作状态确定冗余控制单元的助力输出值,并控制冗余控制单元基于冗余控制单元的助力输出值为当前车辆的转向系统进行助力。由此,解决了相关技术中双冗余形式的控制单元功能安全等级较低,失效冗余能力较差,从而易影响控制器助力的正常输出等问题,通过采用多冗余形式的控制单元,以提高车辆控制单元的失效容错机制及安全等级,进而保障车辆的正常安全行驶。
29、本技术的另一个目的在于提出一种车辆eps控制器的冗余控制装置,该装置解决了相关技术中双冗余形式的控制单元功能安全等级较低,失效冗余能力较差,从而易影响控制器助力的正常输出等问题,通过采用多冗余形式的控制单元,以提高车辆控制单元的失效容错机制及安全等级,进而保障车辆的正常安全行驶。
30、为达到上述目的,本技术的技术方案是这样实现的:
31、一种车辆eps控制器的冗余控制装置,所述eps控制器包括第一控制单元、第二控制单元和冗余控制单元,其中,包括:
32、获取模块,用于获取所述第一控制单元的当前工作状态和所述第二控制单元的当前工作状态;
33、判断模块,用于基于所述第一控制单元的当前工作状态和所述第二控制单元的当前工作状态,判断当前车辆是否满足预设的冗余控制条件;以及
34、控制模块,用于若所述当前车辆满足所述预设的冗余控制条件,则根据所述第一控制单元的当前工作状态和所述第二控制单元的当前工作状态确定所述冗余控制单元的助力输出值,并控制所述冗余控制单元基于所述冗余控制单元的助力输出值为所述当前车辆的转向系统进行助力。
35、进一步地,所述判断模块,具体用于:
36、基于所述第一控制单元的当前工作状态,判断所述第一控制单元的助力输出值是否小于第一预设阈值;
37、和/或,基于所述第二控制单元的当前工作状态,判断所述第二控制单元的助力输出值是否小于第二预设阈值;
38、若所述第一控制单元的助力输出值小于所述第一预设阈值,和/或所述第二控制单元的助力输出值小于所述第二预设阈值,则判定所述当前车辆满足所述预设的冗余控制条件。
39、进一步地,所述控制模块,具体用于:
40、若所述第一控制单元的助力输出值小于所述第一预设阈值,且所述第二控制单元的助力输出值不小于所述第二预设阈值,则根据所述转向系统的总需求助力值和所述第二控制单元的助力输出值确定所述冗余控制单元的助力输出值的第一结果;
41、若所述第一控制单元的助力输出值不小于所述第一预设阈值,且所述第二控制单元的助力输出值小于所述第二预设阈值,则根据所述转向系统的总需求助力值和所述第一控制单元的助力输出值确定所述冗余控制单元的助力输出值的第二结果;
42、若所述第一控制单元的助力输出值小于所述第一预设阈值,且所述第二控制单元的助力输出值小于所述第二预设阈值,则根据所述转向系统的总需求助力值确定所述冗余控制单元的助力输出值的第三结果。
43、进一步地,所述控制模块,具体用于:
44、断开所述第一控制单元对应的第一相保护开关和第一三相驱动电路的同时,控制所述冗余控制单元对应的第二相保护开关和第二三相驱动电路闭合;
45、基于所述第一结果,控制所述冗余控制单元代替所述第一控制单元为所述当前车辆的转向系统进行助力。
46、进一步地,所述控制模块,具体用于:
47、断开所述第二控制单元对应的第三相保护开关和第三三相驱动电路的同时,控制所述冗余控制单元对应的第四相保护开关和第四三相驱动电路闭合;
48、基于所述第二结果,控制所述冗余控制单元代替所述第二控制单元为所述当前车辆的转向系统进行助力。
49、进一步地,所述控制模块,具体用于:
50、断开所述第一相保护开关、所述第一三相驱动电路、所述第三相保护开关和所述第三三相驱动电路的同时,控制所述第二相保护开关、所述第二三相驱动电路、所述第四相保护开关和所述第四三相驱动电路闭合;
51、基于所述第三结果,控制所述冗余控制单元代替所述第一控制单元和所述第二控制单元为所述当前车辆的转向系统进行助力。
52、所述的车辆eps控制器的冗余控制装置与上述的车辆eps控制器的冗余控制方法相对于现有技术所具有的优势相同,在此不再赘述。
53、本技术的再一个目的在于提出一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的车辆eps控制器的冗余控制方法。
54、本技术的再一个目的在于提出一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的车辆eps控制器的冗余控制方法。
55、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
技术实现思路
- 还没有人留言评论。精彩留言会获得点赞!