用于控制车辆后轮转向的设备、系统和方法以及车辆与流程
本公开内容涉及用于控制转向的设备、系统和方法。特别地但非排他地,本公开内容涉及用于控制诸如汽车的道路车辆的后轮转向的设备、系统和方法以及使用其的道路车辆。本发明的各方面涉及设备、系统、车辆、方法、计算机程序和其中存储有指令的非暂态计算机可读存储介质。
背景技术:
1、设计为在道路上使用的一些汽车被布置成具有均可转向的四个道路轮。对于这样的汽车,已知在低速下将后轮与前轮异相转向以增强操纵性,并且在高速下将后轮与前轮同相转向以增强稳定性。
2、这样的汽车的问题在于,可以增强道路上的性能的四轮转向布置并非最适合在其他地形上使用。
3、本发明的目的是解决现有技术的缺点。
技术实现思路
1、本发明的方面和实施方式提供了如下的设备、系统、车辆、方法和计算机程序以及其中存储有指令的非暂态计算机可读存储介质。
2、根据本发明的一个方面,提供了一种用于控制车辆后轮转向的设备,该设备包括控制装置,控制装置被配置成进行以下操作:接收第一信号,第一信号指示请求转向角;以及接收第二信号,第二信号指示从至少第一模式和第二模式中选择的选择模式;根据第一信号和第二信号确定建议后轮转向角;以及提供输出信号,输出信号被配置成使后轮以建议后轮转向角转向。这提供了以下优点:后轮的转向可以针对选择模式进行优化,例如以使车辆的操纵性或稳定性最大化,并且可以针对车辆正在行驶的地形进行优化。
3、在一些实施方式中,控制装置被配置成接收指示车辆的当前速度的第三信号,并且根据第三信号确定建议后轮转向角。这提供了以下优点:后轮的转向可以针对车辆在地形上行驶的速度进行优化,例如以使车辆的操纵性或稳定性最大化。
4、在一些实施方式中:建议后轮转向角是前轮转向角与增益值的乘积;控制装置被配置成利用取决于由第二信号指示的选择模式的增益值来确定建议后轮转向角。
5、在一些实施方式中,控制装置被配置成根据当前速度小于阈值速度还是大于阈值速度来选择增益值。这提供了以下优点:后轮的转向可以被布置成在低于阈值速度的情况下增强操纵性和/或在高于阈值速度的情况下增加稳定性。
6、在一些实施方式中,控制装置被配置成:根据当前速度小于阈值速度,使后轮以与前轮转向角异相的建议后轮转向角转向;以及根据当前速度大于阈值速度,使后轮以与前轮转向角同相的建议后轮转向角转向。这提供了以下优点:后轮的转向增强了小于阈值速度下的操纵性并增加了大于阈值速度下的稳定性。
7、在一些实施方式中,控制装置被配置成根据选择模式来选择阈值速度。这提供了以下优点:在稳定性不太重要的地形上,可以向车辆提供直到相对高的阈值速度下的增强的操纵性,而在稳定性更成问题的地形上,可以提供低至相对低的阈值速度下的增加的稳定性。
8、在一些实施方式中,控制装置被配置成从地形估计系统接收第二信号,地形估计系统被配置成根据检测到的车辆正在行驶的地面的特征来产生第二信号。这提供了以下优点:能够根据车辆行驶的地形的变化来自动地调整对建议后轮转向角的确定。
9、在一些实施方式中,控制装置被配置成:根据确定车辆的车轮与车轮所接触的地面之间的摩擦力低于第一摩擦力阈值而选择第一模式;以及根据确定所述摩擦力高于第一摩擦力阈值而选择第二模式。
10、在一些实施方式中,控制装置被配置成根据确定车辆的车轮所接触的地面能够由车辆的车轮引起变形而选择第一模式。
11、在一些实施方式中,响应于用户输入装置处的输入来产生第二信号。
12、在一些实施方式中,根据选择模式来确定车辆的至少一个性能特征,所述至少一个性能特征包括以下组中的至少之一:油门踏板映射;变速器映射;稳定性控制设置。
13、在一些实施方式中,控制装置被配置成将车辆的当前状况确定为多个预定义状况之一,并且确定取决于当前状况的建议后轮转向角;预定义状况包括以下中至少之一:低牵引力状况;以超过阈值侧倾角的侧倾角取向;沿斜坡下行向后移动。这提供了以下优点:可以针对车辆的当前状况优化后轮的转向。
14、在一些实施方式中,控制装置包括存储有指令的电子存储器装置以及电子处理器,电子处理器电耦接到电子存储器装置并且被配置成访问电子存储器装置并且执行指令。
15、根据本发明的另一方面,提供了一种系统,该系统包括根据前述段落中任一段落所述的设备以及至少一个致动器,所述至少一个致动器用于响应于输出信号来控制车辆的后轮的转向角。
16、在一些实施方式中,该系统包括地形估计系统,地形估计系统被配置成确定车辆正在行驶的地形的特征,其中,控制装置被配置成根据控制装置从地形估计系统接收的信号来选择选择模式。
17、根据本发明的又一方面,提供了一种车辆,该车辆包括根据前述段落中任一段落所述的设备或根据前述段落之一所述的系统。
18、根据本发明的另一方面,提供了一种控制车辆后轮转向的方法,该方法包括:接收第一信号,第一信号指示请求转向角;以及接收第二信号,第二信号指示从至少第一模式和第二模式中选择的选择模式;根据第一信号和第二信号确定建议后轮转向角;以及使后轮以建议后轮转向角转向。这提供了以下优点:后轮的转向可以针对选择模式进行优化,例如以使车辆的操纵性或稳定性最大化,并且可以针对车辆正在行驶的地形进行优化。
19、在一些实施方式中,该方法包括:接收指示车辆当前速度的第三信号,并且根据第三信号来确定建议后轮转向角。这提供了以下优点:后轮的转向可以针对车辆正在地形上行驶的速度进行优化,例如以使车辆的操纵性或稳定性最大化。
20、在一些实施方式中,建议后轮转向角是前轮转向角与增益值的乘积。增益值取决于由第二信号指示的选择模式。
21、在一些实施方式中,该方法包括根据当前速度是低于阈值速度还是高于阈值速度来选择增益值。这提供了以下优点:后轮的转向可以被布置成在低于阈值速度的情况下增强操纵性和/或在高于阈值速度的情况下增加稳定性。
22、在一些实施方式中,该方法包括:根据当前速度低于阈值速度,使后轮以与前轮转向角异相的建议后轮转向角转向;以及根据当前速度高于阈值速度,使后轮以与前轮转向角同相的建议后轮转向角转向。这提供了以下优点:后轮的转向在低于阈值速度的情况下增强操纵性,并且在高于阈值速度的情况下增加稳定性。
23、在一些实施方式中,该方法包括根据选择模式来选择阈值速度。这提供了以下优点:在稳定性不太重要的地形上,可以在高达相对高的阈值速度的情况下向车辆提供增强的操纵性,而在稳定性更成问题的地形上,可以在低至相对低的阈值速度的情况下提供增加的稳定性。
24、在一些实施方式中,该方法包括根据车辆正在行驶的地面的检测特征或响应于用户输入装置处的输入来产生第二信号。
25、在一些实施方式中,该方法包括:将车辆的当前状态确定为多个预定义状态之一,并且确定取决于当前状态的建议后轮转向角。预定义状态包括以下中至少之一:低牵引力状况;以超过阈值侧倾角的侧倾角取向;沿斜坡下行向后移动。这提供了以下优点:可以针对车辆的当前状况优化后轮的转向。
26、根据本发明的另一方面,提供了一种计算机程序,该计算机程序在由处理器执行时使处理器执行根据前述段落中任一段落所述的方法。
27、根据本发明的又一方面,提供了一种存储有指令的非暂态计算机可读存储介质,指令在处理器上执行时使处理器执行根据前述段落中任一段落所述的方法。
28、根据本发明的另一方面,提供一种用于控制车辆转向的设备,该设备包括控制装置,该控制装置被配置成进行以下操作:接收第一信号,第一信号指示请求转向角;以及接收第二信号,第二信号指示选择模式;根据第一信号和第二信号确定建议转向角;以及提供输出信号,输出信号被配置成使车轮以转向建议角转向。
29、在一些实施方式中,选择模式是从多个不同地形模式中选择的,每种模式适合于相应类型的地形。
30、根据本发明的一个方面,提供了一种用于控制车辆后轮转向的设备,该设备包括控制装置,控制装置被配置成进行以下操作:确定车辆的向后移动状况;确定车辆的俯仰角;根据请求转向角、车辆的俯仰角和车辆的向后移动状况确定建议后轮转向角;以及提供输出信号,该输出信号被配置成根据建议后轮转向角控制后轮转向。
31、这提供了以下优点:当车辆沿斜坡下行向后移动时,可以以使得车辆能够被更容易地保持在期望路径上的方式使后轮转向。在斜坡非常陡的情况下,这可以使车辆能够被更容易地保持在防止车辆翻滚的沿斜坡向下的路径上。
32、在一些实施方式中,控制装置被配置成:根据俯仰角小于第一阈值俯仰角确定与前轮转向角异相的建议后轮转向角;以及根据俯仰角大于第一阈值俯仰角确定与前轮转向角不异相的建议后轮转向角。这提供了以下优点:在不太陡的斜坡上给车辆提供有增加的操纵性,但是当沿较陡斜坡倒车下行时更易于控制车辆。
33、在一些实施方式中,控制装置被配置成:接收指示从至少第一模式和第二模式中选择的选择模式的信号;以及当俯仰角大于第一阈值俯仰角时,根据第一模式被选择而确定与前轮转向角异相的建议后轮转向角,并且根据第二模式被选择而确定与前轮转向角不异相的建议后轮转向角。这提供了以下优点:当车辆处于诸如柏油路等易于控制车辆的地形上时,可以继续为车辆提供增强的操纵性,但是在其他地形例如沙丘或草地、碎石、雪或泥上,可以使后轮转向以使沿较陡斜坡的倒车下行更容易控制。
34、在一些实施方式中,控制装置被配置成根据第二模式被选择来确定零度的建议后轮转向角。
35、在一些实施方式中,控制装置被配置成从地形估计系统接收指示选择模式的信号,地形估计系统被配置成根据车辆正在行驶的地面的的检测特征来产生信号。这提供了以下优点:后轮的转向根据车辆正在行驶的地形而自动改变。
36、在一些实施方式中,可以根据确定车辆的车轮与车轮所接触的地面之间的摩擦力高于第一摩擦力阈值而选择第一模式,并且可以根据确定所述摩擦力低于第一摩擦力阈值而选择第二模式。这提供了以下优点:当车辆处于诸如柏油路的提供高抓地力的地形上时,可以继续为车辆提供增强的操纵性,而在提供较少抓地力的其他地形上,可以以使沿斜坡的倒车下行更容易控制的方式使后轮转向。
37、在一些实施方式中,可以根据确定车轮所接触的地面能够由车辆的车轮引起变形而选择第二模式。这提供了以下优点:可以优化后轮的转向以使沿由诸如沙子的材料形成的斜坡倒车下行更容易控制。
38、在一些实施方式中,设备被配置成从用户输入装置接收指示选择模式的信号。
39、在一些实施方式中,根据选择模式来确定车辆的至少一个性能特征,所述至少一个性能特征包括由以下组成的组中的至少之一:油门踏板映射;变速器映射;稳定性控制设置。
40、在一些实施方式中,建议后轮转向角是前轮转向角和增益值的乘积,并且控制装置被配置成:根据俯仰角低于第一阈值俯仰角,利用第一增益值确定第一建议后轮转向角;以及根据俯仰角大于第二阈值俯仰角,利用第二增益值确定第二建议后轮转向角,第二增益值的大小小于第一增益值。第二增益值可以为正或负,并且其也可以与第一增益值相同。
41、在一些实施方式中,控制装置被配置成根据确定俯仰角大于第二阈值俯仰角来确定建议后轮转向角为零。
42、在一些实施方式中,根据确定向后移动状况和大于第三阈值俯仰角的俯仰角,确定与转向输入成比例的建议后轮转向角,并且确定与转向输入成比例且小于后轮转向角的建议前轮转向角。
43、在一些实施方式中,根据确定向后移动状况和大于第三阈值俯仰角的俯仰角,使前轮转向锁定并且确定与转向输入成比例的建议后轮转向角。
44、在一些实施方式中,控制装置被配置成根据接收到指示车辆的向后移动的信号和/或接收到指示车辆的倒档被选择的信号来确定向后移动状况。这样提供了以下优点:当如由倒档选择所指示的有意进行倒车时,以及当由于例如在具有低摩擦力和/或可变形表面的陡坡上的失败爬坡引起倒车时,可以更容易使车辆沿斜坡下行向后转向。
45、在一些实施方式中,控制装置被配置成将车辆的当前状况确定为多个预定义状况之一,并且确定取决于当前状况的建议后轮转向角;并且预定义状况包括以下中至少之一:低牵引力状况;以超过阈值侧倾角的侧倾角取向。
46、在一些实施方式中,控制装置被配置成当俯仰角超过第四阈值俯仰角时确定车辆不处于低牵引力状况。这提供了以下优点:如果车辆由于例如在具有低摩擦力和/或可变形表面的陡坡上的失败爬坡而停止,则控制装置将后轮的转向控制成针对沿斜坡下行的向后倒车优化,而不是错误地确定车辆被卡住。
47、在一些实施方式中,控制装置包括存储有指令的电子存储器装置以及电子处理器,电子处理器电耦接到电子存储器装置并且被配置成访问电子存储器装置并执行指令。
48、根据本发明的另一方面,提供了一种系统,该系统包括根据前述段落中任一段落所述的设备以及至少一个致动器,所述至少一个致动器用于响应于输出信号来控制车辆的后轮的转向角。
49、根据本发明的又一方面,提供了一种车辆,其包括根据前述段落中任一段落所述的设备或根据前述段落所述的系统。
50、根据本发明的另一方面,提供了一种用于控制车辆后轮转向的方法,该方法包括:确定车辆的向后移动状况;确定车辆的俯仰角;根据请求转向角、车辆的俯仰角和车辆的向后移动状况确定建议后轮转向角;以及根据建议后轮转向角控制后轮转向。
51、这提供了以下优点:当车辆沿斜坡下行向后移动时,以使得车辆能够被更容易地保持在期望路径上的方式使后轮转向。在斜坡非常陡的情况下,这可以使车辆能够被更容易地保持在防止车辆翻滚的沿斜坡向下的路径上。
52、在一些实施方式中,该方法包括:根据俯仰角小于第一阈值俯仰角确定与前轮转向角异相的建议后轮转向角;以及根据俯仰角大于第一阈值俯仰角确定与前轮转向角不异相的建议后轮转向角。这提供了以下优点:在不太陡的斜坡上车辆更容易被操纵,但是当沿较陡斜坡倒车下行时更易于控制车辆。
53、在一些实施方式中,该方法包括:接收指示从至少第一模式和第二模式中选择的选择模式的信号;以及当俯仰角大于第一阈值俯仰角时,根据所选择的第二模式确定与前轮转向角不异相的建议后轮转向角,并且根据所选择的第一模式确定与前轮转向角异相的建议后轮转向角。这提供了以下优点:当车辆处于诸如柏油路的易于控制车辆的地形上时,可以继续为车辆提供增强的操纵性,但是在其他地形如沙丘或草、碎石、雪或泥土上,可以使后轮转向以使沿较陡斜坡的倒车下行更容易控制。
54、在一些实施方式中,该方法包括从地形估计系统接收指示选择模式的信号,该地形估计系统被配置成根据所车辆正在行驶的地面的检测特征来产生信号。这提供以下优点:后轮的转向根据车辆正在行驶的地形而自动改变。
55、在一些实施方式中,根据确定车辆的车轮与车轮所接触的地面之间的摩擦力高于第一摩擦力阈值而选择第一模式;以及根据确定所述摩擦力低于第一摩擦力阈值而选择第二模式。这提供以下优点:当车辆处于诸如柏油路的提供高抓地力水平的地形上时,可以继续为车辆提供增强的操纵性,而在提供较少抓地力的其他地形上时,可以以使沿斜坡的倒车下行更容易控制的方式使后轮转向。
56、在一些实施方式中,根据确定与车轮所接触的地面能够由车辆的车轮引起变形而选择第二模式。这提供了以下优点,可以优化后轮的转向以使沿由诸如沙子的材料形成的斜坡的倒车下行更容易控制。
57、在一些实施方式中,根据用户输入装置处的用户输入来产生指示选择模式的信号。
58、在一些实施方式中,建议后轮转向角是前轮转向角与增益值的乘积,并且该方法包括:根据俯仰角小于阈值俯仰角,利用第一增益值来确定第一建议后轮转向角;以及根据俯仰角大于第二阈值俯仰角,利用第二增益值来确定第二建议后轮转向角,第二增益值小于第一增益值。
59、在一些实施方式中,该方法包括根据确定俯仰角大于第二阈值俯仰角而确定建议后轮转向角为零。
60、在一些实施方式中,该方法包括:将车辆的当前状态确定为多个预定义状况之一,并且确定取决于当前状况的建议后轮转向角;以及预定义状况包括以下中的至少之一:低牵引力状况;以大于阈值侧倾角的侧倾角取向。
61、根据本发明的另一方面,提供了一种计算机程序,该计算机程序在被处理器执行时使处理器执行根据前述段落中的任一段落所述的方法。
62、根据本发明的又一方面,提供了一种存储有指令的非暂态计算机可读存储介质,指令当处理器上执行时使处理器执行根据前述段落中的任一段落所述的方法。
63、根据本发明的再一方面,提供了一种用于控制车辆后轮转向的设备,该设备包括控制装置,该控制装置被配置成:根据定义车辆的当前状态的多个状态值来确定车辆的状况;以及根据请求转向角和车辆的状况确定建议后轮转向角;以及根据建议后轮转向角使车辆的后轮转向。
64、在一些实施方式中,状态值包括包含以下的组中的至少两个:侧倾角、俯仰角、纵向速度、纵向加速度、向心加速度、横摆率目标、横摆率测量值、请求转向角和车辆方向指示。
65、在一些实施方式中,控制装置被配置成将车辆的状况确定为多个预定义状况之一。在一些实施方式中,预定义状况包括标准状况和由以下组成的组中的至少之一:车辆沿斜坡下行向后移动的倒车下行状况;以及车辆以大于阈值侧倾角的侧倾角取向的边坡(bank)状况;低牵引力状况。
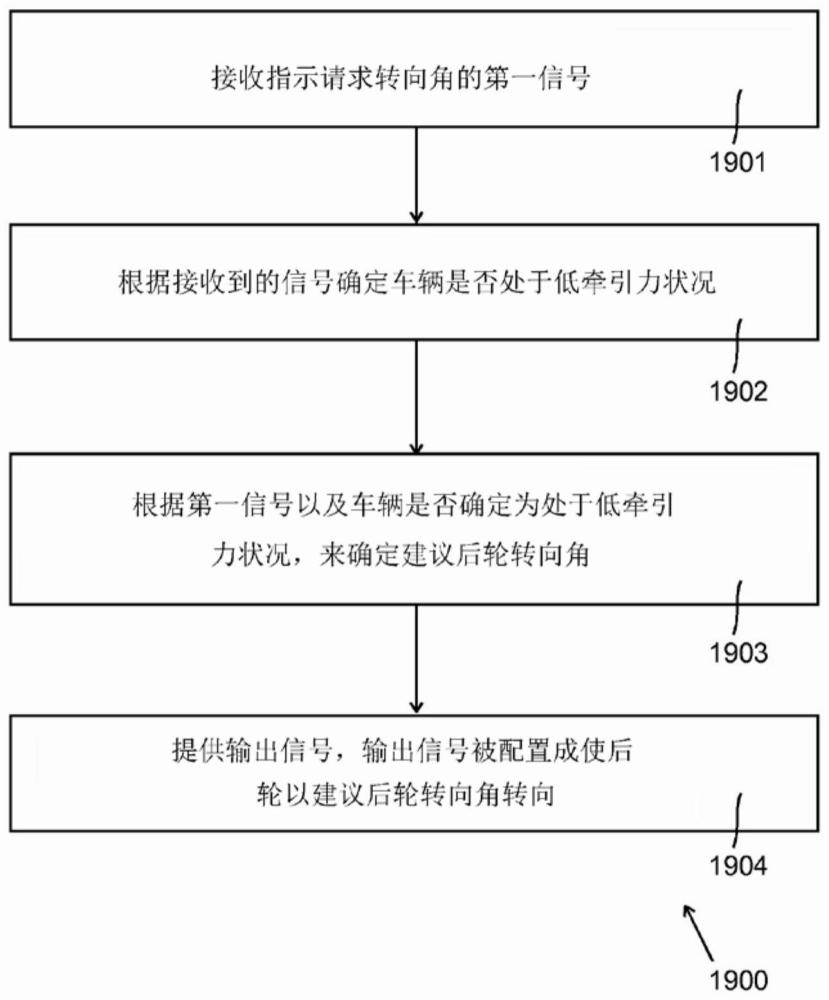
66、根据本发明的一个方面,提供了一种用于控制车辆后轮转向的设备,该设备包括控制装置,该控制装置被配置成:根据接收到的信号确定车辆是否处于低牵引力状况;以及接收指示前轮转向角的第一信号;根据第一信号以及是否确定车辆处于低牵引力状况来确定建议后轮转向角;以及提供输出信号,该输出信号被配置成使后轮以建议后轮转向角转向。这提供了以下优点:如果由于车辆正在行驶的地形提供的牵引力差而导致车辆卡住或仅行进缓慢,则可以通过后轮的转向来模拟被设计成产生额外的抓地力的前轮周期性转向。例如,驾驶员可以在请求动力系产生扭矩的情况下左右摆动方向盘,以清除前轮下方的松散表面层,从而在下方的较硬表面上获得更好的牵引力。后轮可以模拟该动作以在后轮与地面之间另外提供更好的牵引力。
67、在一些实施方式中,建议后轮转向角是前轮转向角与增益值的乘积。控制装置被配置成:根据车辆处于低牵引力状况而选择第一增益值以及根据车辆未处于低牵引力状况而选择第二增益值;并且第一增益值大于第二增益值。这提供了以下优点:当试图增加牵引力时,可以使后轮以与前轮的角度更像的角度摆动。
68、在一些实施方式中,控制装置被配置成根据所满足的一组标准来确定车辆处于低牵引力状况。这提供了以下优点:车辆能够自动确定适合于低牵引力状况的建议后轮转向角。例如,不需要用户在用户输入装置处提供输入以利用适合于增加牵引力的较大的第二增益值来使后轮转向。
69、在一些实施方式中,标准之一包括确定前轮转向角以高于阈值频率的频率摆动。
70、在一些实施方式中,标准之一包括从动力系请求扭矩的指示。
71、在一些实施方式中,控制装置被配置成:接收指示车辆的测量横摆率的信号,以及根据前轮转向角、后轮转向角和轮速度指示来计算目标横摆率;并且标准之一包括车辆的测量横摆与目标横摆之间的差大于阈值。这提供了以下优点:控制装置能够准确地确定车辆是否处于低牵引力状况。
72、在一些实施方式中,控制装置被配置成接收选择模式的指示,并且当确定车辆处于低牵引力状况时,控制装置被配置成根据选择模式确定后轮的建议转向角。这提供了以下优点:例如,在当前选择模式(例如在粗糙的岩石地形上使用的模式)不合适时,不必使用在车辆卡在沙子或泥土中时将有助于释放车辆的后轮转向。
73、在一些实施方式中,响应于用户输入或响应于地形传感器信号来选择选择模式。
74、在一些实施方式中,当确定车辆处于低牵引力状况时,控制装置被布置成提供输出信号,该输出信号被配置成使后轮的转向与前轮的转向异相。这提供了以下优点:当车辆的牵引力得到提高时,后轮中用于获得更大牵引力的附加转向只会使车辆转弯更快,而如果后轮与前轮同相转向,当车辆的牵引力提高时,车辆可能会突然移动至转向方向的一侧。
75、在一些实施方式中,控制装置被配置成将车辆的当前状态确定为多个预定义状态之一并且确定取决于当前状态的建议后轮转向角;并且预定义状态包括以下至少之一:以大于阈值侧倾角的侧倾角取向;以大于阈值俯仰角的俯仰角沿斜坡下行向后移动。这提供了以下优点:可以针对车辆的当前状况优化后轮的转向。
76、在一些实施方式中,控制装置包括:电子存储器装置,并且在该电子存储器装置中存储有指令;电子处理器,该电子处理器电耦接至电子存储器装置并且被配置成访问电子存储器装置并执行指令。
77、根据本发明的另一方面,提供了一种用于控制车辆的后轮的转向的系统,该系统包括根据前述段落中的任一段落所述的设备以及至少一个致动器,所述至少一个致动器用于响应于输出信号来控制车辆的后轮的转向角。
78、在一些实施方式中,该系统包括被配置成感测车辆的横摆率的感测装置。
79、在一些实施方式中,感测装置包括陀螺仪。
80、根据本发明的另一方面,提供了一种车辆,该车辆包括根据前述段落中的任一段落所述的设备或根据前述段落中的任一段落所述的系统。
81、在一些实施方式中,车辆包括用于控制车辆的前轮的转向角的转向机构,该转向机构包括可手动操作的装置,该可手动操作的装置被配置成使得能够调节转向机构。
82、根据本发明的另一方面,提供了一种利用前轮转向和后轮转向来控制车辆后轮转向的方法,该方法包括:根据接收到的信号确定车辆是否处于低牵引力状况;接收指示前轮转向角的第一信号;根据第一信号和是否确定车辆处于低牵引力状况来确定建议后轮转向角;以及使后轮以建议后轮转向角转向。这提供了以下优点:如果由于车辆正在行驶的地形提供的牵引力差而导致车辆卡住或仅行进缓慢,则可以通过后轮的转向来模拟被设计成产生额外的抓地力的前轮周期性转向。
83、在一些实施方式中,建议后轮转向角是前轮转向角与增益值的乘积;根据确定车辆处于低牵引力状况而选择第一增益值;根据确定车辆不处于低牵引力状况而选择第二增益值;并且第一增益值大于第二增益值。这提供了以下优点:当试图增加牵引力时,可以使后轮以与前轮的角度更像的角度摆动。
84、在一些实施方式中,根据所满足的一组标准来确定车辆处于低牵引力状况。这提供了以下优点:能够自动确定适合于低牵引力状况的建议后轮转向角。
85、在一些实施方式中,标准之一包括确定前轮转向角以高于阈值频率的频率摆动。
86、在一些实施方式中,标准之一包括所请求的扭矩的指示。
87、在一些实施方式中,该方法包括:接收指示车辆的测量横摆率的信号,以及根据前轮转向角、后轮转向角和接收到的车辆的速度指示来计算目标横摆率;并且标准之一包括车辆的测量横摆与大于阈值的目标横摆之间的差。这提供了以下优点:控制装置能够准确地确定车辆是否处于低牵引力状况。
88、在一些实施方式中,该方法包括接收选择模式的指示,并且根据选择模式确定后轮的建议转向角。这提供了以下优点:例如,在当前选择模式(例如在粗糙的岩石地形上使用的模式)不合适时,不必使用在车辆卡在沙子或泥土中时将有助于释放车辆的后轮转向。
89、在一些实施方式中,响应于用户输入或响应于地形传感器信号来选择选择模式。
90、在一些实施方式中,当确定车辆处于低牵引力状况时,该方法包括使后轮的转向与前轮的转向异相。这提供了以下优点:当车辆的牵引力得到提高时,后轮中用于获得更大牵引力的附加转向只会使车辆转弯更快,而如果后轮与前轮同相转向,当车辆的牵引力提高时,车辆可能会突然移动至转向方向的一侧。
91、根据本发明的又一方面,提供了一种计算机程序,该计算机程序在由处理器执行时使处理器执行根据前述段落中的任一段落所述的方法。
92、根据本发明的又一方面,提供了一种其中存储有指令的非暂态计算机可读存储介质,该指令在处理器上被执行时使处理器执行根据前述段落中的任一段落所述的方法。
93、根据本发明的一个方面,提供了一种用于控制车辆的转向的设备,该设备包括控制装置,该控制装置被配置成:接收指示请求转向角的第一信号;接收指示车辆的侧倾角的第二信号;根据第一信号确定车辆的可转向轮的建议转向角;以及提供输出信号,该输出信号被配置成使可转向轮以建议转向角转向;其中,根据所满足的一组标准,控制装置被配置成根据第二信号来确定建议转向角。这提供了以下优点:对驾驶员来说更容易保持沿边坡的期望路径(例如在边坡上方恒定的高度)。
94、在一些实施方式中,控制装置被配置成根据接收到指示增大的侧倾角的第二信号来增大建议转向角。这提供了以下优点:随着边坡的陡度变化,控制装置能够自动补偿边坡对车辆的变化影响,并且因此更容易维持沿边坡的期望路径。
95、在一些实施方式中,从转向输入传感器接收第一信号,该转向输入传感器被配置成接收用户请求的转向角。
96、在一些实施方式中,该设备被配置成控制车辆后轮转向。
97、在一些实施方式中,第一信号指示前轮转向角,并且建议转向角是建议后轮转向角。
98、在一些实施方式中,根据标准被满足,控制装置被配置成根据指示前轮转向角为零的第一信号来确定非零后轮转向角。这提供了以下优点:驾驶员能够在不转动方向盘的情况下保持沿边坡的直的路径。
99、在一些实施方式中,非零后轮转向角被布置成根据侧倾角为正(这对应于车辆的左侧相对于车辆的右侧升高)而将车辆的后部转至右侧;并且非零后轮转向角被布置成根据侧倾角为负将车辆的后部转至左侧。这提供了以下优点:后轮使车辆的后部向边坡下方转向,以使车辆稍微向边坡上方成角度,并且使车辆在沿边坡的路径上行驶。
100、在一些实施方式中,根据标准被满足,控制装置被配置成根据接收到指示增大小于阈值角的前轮转向角的第一信号来减小后可转向轮的建议转向角。这提供了以下优点:后轮转向能够平稳地过渡到标准模式,以使得驾驶员能够平稳地改变车辆的行驶路线,例如离开边坡。
101、在一些实施方式中,根据标准被满足,控制装置被配置成根据接收到指示增大大于阈值角的前轮转向角的第一信号来增大后可转向轮的建议转向角。这提供了以下优点:当转向角大于阈值角时,对转向的控制过渡到更敏捷的模式。
102、在一些实施方式中,根据一组标准中的一个标准未满足,控制装置被配置成在第一信号指示前轮转向角为零时确定后轮转向角为零。这提供了以下优点:除非该组标准中的所有标准被满足——这指示车辆正在驶过边坡,否则后轮转向能够以常规方式进行操作。
103、在一些实施方式中,根据一组标准中的一个标准未被满足,控制装置被配置成当接收到的第一信号指示增大大于或小于阈值角的前轮转向角时,增大后可转向轮的建议转向角。
104、在一些实施方式中,控制装置被配置成接收模式信号,并且当标准被满足时,控制装置被配置成根据模式信号来确定后可转向轮的建议转向角。这提供了以下优点:可以以期望最适当地补偿边坡对车辆的影响的方式来控制后轮转向。例如,当车辆沿边坡行驶并且前轮以零度转向时,后轮可以在用于在沙子上行驶的模式下以相对大的角度转向,而在用于在坚硬的地面上行驶的模式下以相对较小的角度或零度转向。
105、在一些实施方式中,模式信号响应于用户输入而生成或者响应于地形传感器信号而生成。
106、在一些实施方式中,控制装置被配置成确定后可转向轮的建议转向角,该建议转向角是前轮转向角与增益值的乘积;增益值取决于所有标准是否被满足;并且控制装置被配置成根据从一个标准也不满足到所有标准被满足的变化,使得在第一增益值与第二增益值之间逐渐过渡。这提供了以下优点:当车辆以平稳的方式驶上边坡时,转向会自动进行调整,从而使用户能够容易地保持车辆方向的控制。
107、在一些实施方式中,该组标准包括第二信号,第二信号指示大于阈值角的侧倾角。
108、在一些实施方式中,该组标准包括侧倾角在限定的时间段内连续大于阈值角。这提供了以下优点:如果车辆以从大于阈值角摆动到小于阈值角的角度沿边坡行驶,则转向确实会迅速变动。
109、在一些实施方式中,控制装置被配置成:接收指示车辆的当前速度的速度信号;并且该组标准包括指示当前速度小于阈值速度的速度信号。
110、在一些实施方式中:控制装置被配置成将车辆的当前状况确定为多个预定义状况之一,并且确定取决于当前状况的建议后轮转向角;并且预定义状况包括以下中的至少之一:低牵引力状况;以大于阈值俯仰角的俯仰角沿斜坡下行向后移动。这提供了以下优点:可以针对车辆的当前状况优化后轮转向。
111、在一些实施方式中,控制装置包括:电子存储器装置,并且在该电子存储器装置中存储有指令;电子处理器,该电子处理器电耦接至电子存储器装置并且被配置成访问电子存储器装置并执行指令。
112、根据本发明的另一方面,提供了一种用于控制车辆的转向的系统,该系统包括根据前述段落中的任一段落所述的设备以及至少一个致动器,该至少一个致动器用于响应于输出信号来控制车辆的车轮的转向角。
113、根据本发明的又一方面,提供了一种车辆,该车辆包括根据前述段落中的任一段落所述的设备或根据前述段落所述的系统。
114、根据本发明的另一方面,提供了一种用于控制车辆的转向的方法,该方法包括:根据请求转向角确定车辆的可转向轮的建议转向角;以及提供输出信号,该输出信号被配置成使可转向轮以建议转向角转向;其中,根据一组标准被满足,根据车辆的侧倾角来确定建议转向角。这提供了以下优点:对驾驶员来说,更容易保持沿边坡的期望路径(例如在边坡上方恒定的高度)。
115、在一些实施方式中,方法包括根据接收到指示增加侧倾角的第二信号来增加建议转向角。这提供了以下优点:随着边坡的陡度变化,边坡对车辆的变化影响得到补偿,并且因此更容易保持沿边坡的期望路径。
116、在一些实施方式中,输出信号被配置成控制车辆后轮转向。
117、在一些实施方式中,所述第一信号指示前轮转向角,并且建议转向角是建议后轮转向角。
118、在一些实施方式中,根据标准被满足,方法包括:根据指示前轮转向角为零的所述第一信号来确定非零后轮转向角;以及根据接收到指示增大低于阈值角的前轮转向角的第一信号来减小后可转向轮的建议转向角。这提供了以下优点:驾驶员能够在不转动方向盘的情况下维持沿边坡的直的路径,以及平滑地转变成标准模式,以使得驾驶员能够平滑地改变车辆的线路,例如离开边坡。
119、在一些实施方式中,一组标准之一是第二信号指示大于阈值角的侧倾角。
120、在一些实施方式中,一组标准之一是侧倾角在限定的时间段内连续地高于阈值角。这提供了以下优点:在车辆沿着以从大于阈值角摆动至小于阈值角的角度沿边坡行驶,转向确实迅速地变动。
121、在一些实施方式中,一组标准之一是当前速度低于阈值速度。
122、根据本发明的另一方面,提供了一种计算机程序,其在由处理器执行时使处理器执行根据前面段落中任一段落所述的方法。
123、根据本发明的又一方面,提供了其中存储有指令的非暂态计算机可读存储介质,该指令在处理器上执行时使处理器执行根据前面段落中任一段落所述的方法。
124、根据本发明的一方面,提供了用于车辆的转向系统的控制系统,该控制系统包括一个或更多个控制器,该控制系统被配置成将减速时间值与目标时间值进行比较,其中,减速时间值指示直到车辆的速度达到零的预测持续时间,并且根据比较输出控制转向轮的转向角的控制信号,使得转向轮在车辆速度达到零时被控制成朝向向前直行状况转动。
125、这提供了不会使轮“空转”的好处,并且另外的好处是不会过度地限制转向角,使得操纵性提高。这在转向系统是后轮转向系统的控制系统中是特别有利的,这是因为部件和致动器与在前轮转向系统中相比可以具有更小的机械性能和电气性能。
126、在一些实施方式中,控制系统被配置成根据减速时间值等于或小于目标时间值,或者换言之,根据目标时间值等于或大于减速时间值,输出控制信号。
127、在本发明的实施方式中,目标时间值可以是存储在一个或更多个控制器的存储器内的预定时间值。
128、在前述实施方式的替选实施方式中,目标时间值包括致动器时间值,该致动器时间值指示车辆的转向轮返回到向前直行状况的持续时间。优选地,根据当前致动器位移和致动器速率来确定致动器时间值。
129、致动器速率可以是存储在一个或更多个控制器的存储器中的预定值,替选地,可以根据表面摩擦值和车辆质量值中的至少之一来确定致动器速率。
130、目标时间值还可以包括可调时间值,其优选地至少部分地根据控制系统内的估计等待时间来确定。
131、还可以至少部分地根据以下中的至少一项来动态地确定可调时间值:当前车辆速度,当前车辆加速度,表面摩擦值和车辆质量值。
132、可调时间值可以是存储在一个或更多个控制器的存储器内的预定时间值。
133、在本发明的一些实施方式中,向前直行状况可以在相对平行于车辆的纵轴为-3.5度至3.5度的范围内。
134、在本发明的实施方式中,控制系统可以被配置成接收指示当前车辆速度的速度信号、指示当前车辆加速度的加速度信号,并且根据接收到的速度信号和加速度信号来确定减速时间值。
135、替选地,控制系统可以被配置成接收指示一段时间内的车辆速度的多个速度信号,并且根据接收到的多个速度信号来确定减速时间值。
136、在一些实施方式中,控制信号优先于正常使用控制信号。
137、在一些实施方式中,控制系统被配置成接收指示车辆的行驶模式的行驶模式信号,根据行驶模式信号不输出控制信号。行驶模式可以是岩石爬行模式(rock crawlmode)。
138、根据本发明的一方面,提供了转向系统,其包括根据前述方面所述的控制系统。
139、在一些实施方式中,转向系统包括转向致动器。
140、根据本发明的一方面,提供了一种车辆,其包括根据前述方面所述的控制系统或转向系统。优选地,车辆是后轮转向车辆或全轮转向车辆。
141、根据本发明的一方面,提供了控制车辆的转向系统的方法,该方法包括:将减速时间值与目标时间值进行比较,其中,减速时间值指示直到车辆的速度达到零的预测持续时间,并且根据比较控制转向轮的转向角,使得转向轮在车辆速度达到零时返回到向前直行状况。
142、在本技术的范围内,明确地表示的是,在前述段落中、权利要求中和/或下面的描述和附图中阐述的各个方面、实施方式、示例和替选方案以及尤其其各个特征可以被独立地采用或者任意组合地采用。即,所有的实施方式和/或任何实施方式中的特征可以按任何方式和/或组合来进行组合,除非这些特征不兼容。申请人保留更改任何原始提交的权利要求或者相应地提交任何新权利要求的权利,包括将任何原始提交的权利要求修改成引用和/或合并任何其他权利要求的任何特征的权利,尽管并非最初以该方式要求保护。
- 还没有人留言评论。精彩留言会获得点赞!