海洋电力转向自动驾驶系统的制作方法
[0001]
本发明涉及一种船舶控制系统,包括自动驾驶系统和动力转向系统。
背景技术:
[0002]
船舶可配备自动驾驶系统,该系统允许船舶在无需人工输入的情况下自动转向。自动驾驶系统可能需要额外的装置将自动驾驶系统连接到现有的船舶转向系统。因此,需要消除附加装置连接,简化自动驾驶系统与船舶转向系统的集成。
技术实现要素:
[0003]
本发明公开了一种用于船舶的控制系统,包括自动驾驶系统和动力转向系统。自动驾驶系统被设置成接收指示导航信息的第一信号并输出指示转向动作的第二信号。动力转向系统与自动驾驶系统通信,并被设置为基于第二信号旋转或转动方向舵和推进装置中的至少一个。
[0004]
还公开了一种用于船舶的控制系统,包括自动驾驶系统和动力转向系统。自动驾驶系统包括处理器,所述处理器被设置为从gps模块和游牧装置中的至少一个接收指示导航信息的第一信号,并且被设置为提供基于所述第一信号的指示转向动作的第二信号。动力转向系统包括转向辅助装置和控制器。转向辅助装置可操作地连接到方向舵和推进装置中的至少一个。控制器被设置为接收第二信号,并被编程为基于第二信号指令转向辅助装置移动至少一个方向舵和推进装置。
[0005]
从以下与图纸结合的描述中,这些优势和其他特征将变得更加明显。
附图说明
[0006]
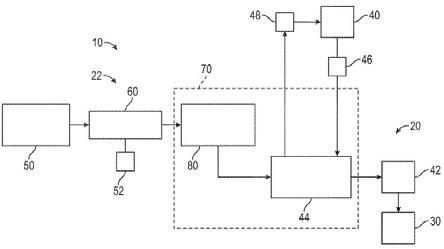
本发明的主题在说明书结束时在权利要求书中特别指出并明确主张。从以下详细描述和随附图纸中可以明显看出本发明的上述特征和其他特征以及优点,其中:图1是一个控制船舶系统的示意图。
[0007]
详细描述现在参考图,其中本公开将参考具体实施例进行描述,而不限制其,需要理解的是,所公开的实施例仅仅是对本公开的说明,本公开可以各种形式和替代形式体现。这些数字不一定要按比例缩放;有些特征可能被夸大或最小化,以显示特定部件的详细信息。因此,本文所公开的具体结构和功能细节不应被解释为限制性的,而应仅作为教导本领域技术人员不同地使用本发明的代表性基础。
[0008]
参考该图,示意性地说明了一艘船舶的控制系统10。控制系统10包括动力转向系统20和自动驾驶系统22。
[0009]
动力转向系统20与方向舵和或推进装置30(如舷外发动机)进行操作连接。动力转向系统20被布置成转动、转动或操纵方向舵和或推进装置30,以响应船舶操作员提供的输入或自动驾驶系统22提供的控制信号来操纵船舶。
[0010]
船舶操作员可通过方向盘40向动力转向系统20提供输入,以操纵船舶。输入可通过机械、无线或有线连接与配备动力转向系统20的转向辅助装置42进行通信或传输,动力转向系统20随后根据输入移动方向舵推进装置30。
[0011]
在所示实施例中,提供给方向盘40的操作员输入通过动力转向控制器44进行电子通信。转向传感器46与方向盘40中的至少一个和与方向盘40相关联的转向轴通信。转向传感器46被设置为向动力转向控制器44提供指示施加到至少一个方向盘和与方向盘40相关联的转向轴上的旋转位置、角度位置、输入力或输入扭矩的信号。动力转向控制器44用于接收信号并向转向辅助装置42提供命令或信号,以移动方向舵和或推进装置30。
[0012]
转向辅助装置42可以是转向柱电动转向(ceps)装置、齿条式电动转向(reps)装置、其组合或类似装置。如果转向辅助装置42被布置为ceps装置,则转向辅助装置42可直接连接到与方向盘40相关联的转向轴上。如果转向辅助装置42作为重复装置布置,则转向辅助装置42可与方向舵和或推进装置30耦合或靠近方向舵和或推进装置30布置。
[0013]
转向辅助装置42包括一个辅助机构,根据转向传感器46和或自动驾驶系统22发出的信号,该机构被布置为向方向舵和或推进装置30施加力,以移动方向舵和或推进装置30。
[0014]
辅助机构可包括与动力转向控制器44通信的液压传感器。液压传感器可操作地连接到液压管路和液压回油管中的至少一个。液压管路和液压回油管可操作地连接到执行器气缸、推杆或类似装置,该执行器气缸、推杆或类似装置可操作地连接到转向连杆齿轮齿条转向系统,该转向系统连接到方向舵推进装置30。
[0015]
辅助机构可包括通过传动系统连接到方向舵推进装置30的电动驱动电机。包括多个电线的电驱动电机,例如电源线、电回流线和与动力转向控制器44通信的其他输入线。电动驱动电机被布置成转动或驱动方向舵推进装置30。
[0016]
辅助机构可包括通过推拉电缆组件连接到方向舵推进装置30的机械装置。机械装置可以是液压系统、电气系统或电液系统,其布置用于移动缆绳组件以转动、转动或以其他方式移动方向舵、推进装置30。
[0017]
在至少一个实施例中,执行器48连接或设置在与方向盘40相关联的转向轴上。执行器48被设置为向方向盘40提供输入。执行器48的布置可以向与方向盘40相关联的转向轴提供可调节的反馈扭矩水平。执行器48与动力转向控制器44通信,其被布置成旋转或反向旋转方向盘40,以响应自动驾驶系统22对船舶的转向或引导,从而使方向舵推进装置30移动。如果自动驾驶系统22使方向舵推进单元30移动以引导船舶朝向左舷(例如左),则动力转向控制器44被编程为命令致动器48使方向盘40朝向端口旋转
ꢀ-
响应于方向舵推进单元30的运动的侧面或左侧。如果自动驾驶系统22使得方向舵推进单元30移动以将船舶朝向右舷侧(例如右侧)引导,则动力转向控制器44被编程。为了响应于舵推进单元30的运动,命令致动器48使方向盘40朝向右舷侧或右侧旋转。
[0018]
自动驾驶仪系统22被设置为向动力转向系统20的转向辅助装置42提供信号或输入,以转动或以其他方式移动方向舵和/或推进装置30,以使船舶转向或引导至所需位置。自动驾驶仪系统22的设置使该船舶能够作为半自主或自主的船舶进行操作,该船舶能够独立于方向盘40进行导航或导航,或不需要该船舶的操作员接合方向盘40。根据gps模块50或游牧设备52提供的信息,自动驾驶仪系统22用于引导或引导船舶沿路径行驶,并对设置和漂移进行流线修正。
[0019]
自动驾驶系统22被设置成从gps模块50或游牧设备52接收指示导航信息的第一信号。并设置为基于第一信号向动力转向系统20的转向辅助单元42输出指示转向动作的第二信号。
[0020]
第一个信号可由gps模块50或游牧设备52提供。gps模块50可以是一个全球定位系统(gps),与船舶或gps设备一起提供。游牧设备52可以是移动电话或其他手持/便携式设备,具有与自动驾驶仪系统22通信的gps功能。游牧设备52可配备导航/映射/路由应用程序。gps模块50或游牧设备52也可以是兼容的国家海洋电子协会(nmea)0183、nmea 2000设备或类似设备。
[0021]
gps模块50或游牧设备52使船舶操作员能够输入操作员选择的目的地、操作员选择的方位、操作员选择的路线、操作员选择的航路点或多个操作员选择的航路点。gps模块50或游牧设备52可连接到自动驾驶仪系统22或与之连接,自动驾驶仪系统22被布置为使用数据、信息、信息,或由gps模块50或游牧设备52提供的信号,用于操作动力转向系统20以引导船舶。动力转向系统20的操作可以独立于油门或推进控制来完成,这样,船舶的速度可以继续由船舶的操作员手动控制。在至少一个实施例中,根据响应动力转向系统20的操作的船舶执行的操纵,自动驾驶系统22被设置为影响船舶的速度。例如,自动驾驶系统22可以提高或降低船舶速度以执行各种转向操作。
[0022]
第一个信号可以是标准化的nmea信息或数据/信息,其中包含导航信息,可通过自动驾驶仪系统22发送至动力转向系统20,以引导船舶。标准化的nmea信息包括使用通信从gps模块50或游牧设备52传输的句子,例如串行通信、无线通信(例如蓝牙、近场通信)。gps模块50或游牧设备52将信息传递给转换器60,例如rs-232到ttl转换器,并最终传递给自动驾驶系统22的控制单元70的处理器。
[0023]
控制单元70包括处理器80,在一些实施例中包括动力转向控制器44。处理器80可以是微处理器,用于分析或解释通过转换器60从gps模块50或游牧设备52接收到的信息。转换器60将rs-232转换为ttl,将消息转换成处理器80可以分析的格式。
[0024]
处理器80被安排或编程为运行处理代码,该代码可以解析gps模块50或游牧设备52提供的信息。处理器80从推荐的当前信息(rmc)和推荐的导航(rmb)中收集有用的信息。处理器80被设置为输出指示转向操作的第二信号,并将第二信号传递给动力转向控制器44,后者反过来操作动力转向系统20来执行转向操作。
[0025]
处理器80还可以接收和使用诸如船舶速度、船舶在地面上的航向、目的地方位或交叉航迹误差值等信息来确定与第二信号相关的所需转向动作。处理器80可由控制器(例如比例积分微分控制器)调节,并可向与动力转向系统20相关联的动力转向控制器44发送所需的转向动作或所需的位置信息。在至少一个实施例中,可以调节或包含处理器80的控制器可以配备或可以是动力转向控制器44的一部分。
[0026]
动力转向系统20随后可根据第二个信号移动、启动、转动、转动或改变方向舵/推进装置30的位置。动力转向控制器44可向执行器48提供信号或命令,以根据第二个信号移动、旋转或转动方向盘40。执行器48对方向盘40的旋转可与方向舵/推进装置30的移动或旋转量相当或成比例。在至少一个实施例中,所述执行器48可被设置为使方向盘40朝着船舶的转向或引导方向脉冲。
[0027]
船舶的操作员可以通过操作方向盘40或通过关闭开关、按钮等来停用自动驾驶系
统22来超越自动驾驶系统22。当自动驾驶仪系统22开启并引导船舶时,如果船舶操作员提供操作员输入,例如方向盘40的角位移或旋转位移大于阈值位移,动力转向控制器44可命令执行器48提供触觉反馈或在预定角度旋转范围内向方向盘40施加角度旋转,以指示方向控制正在移交给船舶操作员。在至少一个实施例中,动力转向控制器44可输出用于显示指示向操作员移交的指示器。指示器可以是听觉指示器、触觉指示器或通过gps模块50的视觉指示器、gps模块50的显示接口、与自动驾驶仪系统22通信的游牧装置52的显示接口或船舶的显示接口。
[0028]
如果在自动驾驶仪系统22开启和引导船舶时,船舶操作员向方向盘40提供小于临界位移的操作员输入,自动驾驶仪系统22可继续为船舶提供指导。在至少一个实施例中,响应到小于阈值位移的方向盘40的操作员输入,动力转向控制器44可命令执行器48在预定的角度旋转范围内向方向盘40提供双向角度旋转或枢轴,以指示没有向操作员移交方向控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1