一种海底声呐机器人用密封外壳
1.本发明涉及声呐机器人领域,特别涉及一种密封外壳。
背景技术:
2.海底声呐机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具,海底声呐机器人有很多组件构成,其中就有海底声呐机器人用密封外壳。现有的具有海底声呐机器人用密封外壳在使用时存在一定的弊端:海底声呐机器人用密封外壳只具备密封作用,功能比较单一,防护性不足,功能集成性若,导致整个设备体积和重量都比较大,从而面临着进一步提高功能集成度的需求。
技术实现要素:
3.本发明的目的是:提供一种海底声呐机器人用密封外壳,可以有效解决背景技术中的问题。
4.本发明的技术方案是:一种海底声呐机器人用密封外壳,包括:
5.机器人壳体,所述机器人壳体包括前部壳体、玻璃罩和尾部壳体,所述玻璃罩的外表面靠近两端位置分别与前部壳体和尾部壳体的内表面固定连接,所述玻璃罩与前部壳体的连接处和玻璃罩与尾部壳体的连接处均设置有密封防水装置,所述玻璃罩的外表面设置有防护装置,所述尾部壳体的外表面开设有环形槽。
6.浮力装置,所述浮力装置包括环形气囊和气囊防护件,所述环形气囊和气囊防护件均安装在环形槽上,所述环形气囊设置在气囊防护件的内部。
7.优选的,所述环形气囊包括一号气囊、环形安装座和若干组支撑块,所述一号气囊通过环形安装座安装在环形槽的内底面中间位置,若干组所述支撑块均固定安装在一号气囊的外表面,所述一号气囊与机器人壳体内部的供气装置连接。
8.优选的,所述气囊防护件包括二号气囊和金属网,所述二号气囊的内表面开设有若干组限位槽,所述金属网外表面的若干组限位条分别与若干组限位槽卡接。
9.优选的,所述尾部壳体上设置有气压调节装置,所述气压调节装置与环形气囊连通。
10.优选的,所述气压调节装置包括排气管和排气组件,所述排气管的外表面中间位置固定安装在尾部壳体上,所述排气组件安装在排气管上。
11.优选的,所述排气组件包括单向阀和防水透气膜,所述排气管的一端与一号气囊连通,所述单向阀安装在排气管的另一端,所述防水透气膜设置在排气管的内部。
12.优选的,所述密封防水装置包括橡胶条,所述橡胶条的两端分别固定安装在机器人壳体各个部分的连接处,机器人壳体各个部分包括前部壳体、玻璃罩和尾部壳体,机器人壳体各个部分的连接处包括前部壳体与玻璃罩的连接处以及玻璃罩和尾部壳体的连接处。
13.优选的,所述橡胶条与机器人壳体连接的外表面开设有条形槽,所述条形槽的内
表面固定安装有压力传感器。
14.优选的,所述防护装置包括两组弧形安装板和两组防护格栅,两组所述弧形安装板对称安装在玻璃罩的外表面,所述防护格栅位于弧形安装板之间,所述弧形安装板上设置有照明灯。
15.优选的,所述防护格栅包括相互连接的若干组弧形横杆和若干组弧形纵杆,若干组所述弧形横杆均倾斜设置。
16.有益效果:1、本发明通过设置的浮力装置,包括浮力装置环形气囊和气囊防护件,气囊防护件位于环形气囊的外侧,气囊防护件上的金属网的强度高,能够起到一定防护效果,而且环形气囊外表面的支撑块与气囊防护件内表面接触,使得环形气囊与气囊防护件之间存在一定的空隙,能够有效防护一号气囊,避免一号气囊损坏,防护效果好,使用寿命长。
17.2、本发明通过设置的浮力装置,浮力装置设置在机器人壳体上,配合声呐机器人内部的驱动装置,能够快速辅助声呐机器人返回水面,使得声呐机器人的密封外壳功能更加的齐全,使用效果更好。
18.3、本发明通过设置的气压调节装置,使用时气压调节装置能够进行排气,改变一号气囊内部气体量,从而改变浮力装置的浮力大小,使得声呐机器人使用时更加的灵活。
19.4、本发明通过设置的防护装置,防护格栅能够有效保护玻璃罩,而且能够引导污泥流动,使得声呐机器人内部的摄像装置能够采集海底数据,通过设置的密封防水装置,能够进一步提升声呐机器人的密封效果,而且能够检测橡胶圈处的压力,能够判断机器人壳体外壳各部分连接处是否出现故障,使用效果更好,而且整个海底声呐机器人用密封外壳的结构简单,成本较低,使用效果好,能够大规模生产应用,较为实用。
附图说明
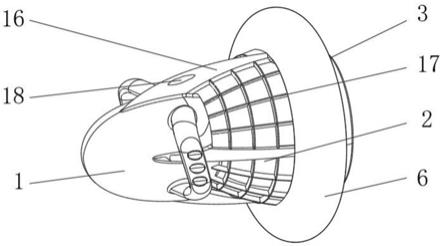
20.图1为本发明的整体结构示意图;
21.图2为本发明的正视结构图;
22.图3为本发明的内部局部结构图;
23.图4为图3中a处结构的放大图;
24.图5为图3中b处结构的放大图;
25.图6为本发明中气囊防护件的局部结构图。
26.附图标记说明:1
‑
前部壳体;2
‑
玻璃罩;3
‑
尾部壳体;4
‑
环形槽;5
‑
环形气囊;6
‑
气囊防护件;7
‑
环形安装座;8
‑
支撑块;9
‑
金属网;10
‑
排气管;11
‑
单向阀;12
‑
防水透气膜;13
‑
橡胶条;14
‑
条形槽;15
‑
压力传感器;16
‑
弧形安装板;17
‑
防护格栅;18
‑
照明灯。
具体实施方式
27.一种海底声呐机器人用密封外壳,如图1
‑
6所示,包括:
28.机器人壳体,机器人壳体包括前部壳体1、玻璃罩2和尾部壳体3,玻璃罩2的外表面靠近两端位置分别与前部壳体1和尾部壳体3的内表面固定连接,玻璃罩2与前部壳体1的连接处和玻璃罩2与尾部壳体3的连接处均设置有密封防水装置,玻璃罩2的外表面设置有防护装置,尾部壳体3的外表面开设有环形槽4。
29.浮力装置,浮力装置包括环形气囊5和气囊防护件6,环形气囊5和气囊防护件6均安装在环形槽4上,环形气囊5设置在气囊防护件6的内部。
30.环形气囊5包括一号气囊、环形安装座7和若干组支撑块8,一号气囊通过环形安装座7 安装在环形槽4的内底面中间位置,若干组支撑块8均固定安装在一号气囊的外表面,一号气囊与机器人壳体内部的供气装置连接。
31.气囊防护件6包括二号气囊和金属网9,二号气囊的内表面开设有若干组限位槽,金属网9外表面的若干组限位条分别与若干组限位槽卡接。
32.尾部壳体3上设置有气压调节装置,气压调节装置与环形气囊5连通。
33.气压调节装置包括排气管10和排气组件,排气管10的外表面中间位置固定安装在尾部壳体3上,排气组件安装在排气管10上。
34.供气装置为浮力装置供气,气压调节装置能够对供气装置进行排气,从而实现浮力装置的浮力。
35.排气组件包括单向阀11和防水透气膜12,排气管10的一端与一号气囊连通,单向阀11 安装在排气管10的另一端,防水透气膜12设置在排气管10的内部。
36.单向阀11和防水透气膜12的设置能够避免外界的水进入到浮力装置的内部。
37.密封防水装置包括橡胶条13,橡胶条13的两端分别固定安装在机器人壳体各个部分的连接处。
38.橡胶条13与机器人壳体连接的外表面开设有条形槽14,条形槽14的内表面固定安装有压力传感器15。
39.压力传感器15检测条形槽14内部压力,机器人壳体各个部分出现连接不牢固时,外界的水进入到条形槽14内部,压力传感器15会检测到压力变大。
40.防护装置包括两组弧形安装板16和两组防护格栅17,两组弧形安装板16对称安装在玻璃罩2的外表面,防护格栅17位于弧形安装板16之间,弧形安装板16上设置有照明灯18。
41.使用时照明灯18启动,照亮海底声呐机器人周边,使得玻璃罩2内部的摄像装置能够拍摄周边图片,采集数据。
42.防护格栅17包括相互连接的若干组弧形横杆和若干组弧形纵杆,若干组弧形横杆均倾斜设置,海底声呐机器人在海底运行时,水流冲击在机器人壳体上,水流将淤泥沿着弧形横杆吹走。
43.需要说明的是,本发明为一种海底声呐机器人用密封外壳,使用时,海底声呐机器人位于海底,供气装置和气压调节装置配合,实现浮力装置浮力的调节,从而提高海底声呐机器人运行的灵活性。
44.通过设置的浮力装置,浮力装置设置在机器人壳体上,配合声呐机器人内部的驱动装置,能够快速辅助声呐机器人返回水面,使得声呐机器人的密封外壳功能更加的齐全,使用效果更好。
45.通过设置的气压调节装置,使用时气压调节装置能够进行排气,改变一号气囊内部气体量,从而改变浮力装置的浮力大小,使得声呐机器人使用时更加的灵活。
46.通过设置的防护装置,防护格栅17能够有效保护玻璃罩2,而且能够引导污泥流动,使得声呐机器人内部的摄像装置能够采集海底数据,通过设置的密封防水装置,能够进
一步提升声呐机器人的密封效果,而且能够检测橡胶圈处的压力,能够判断机器人壳体外壳各部分连接处是否出现故障,使用效果更好,而且整个海底声呐机器人用密封外壳的结构简单,成本较低,使用效果好,能够大规模生产应用,较为实用。
47.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1