一种基于救生船的水域紧急救生方法与流程
1.本发明涉及用于游泳池、海滩、江河湖泊等水域的救生设施领域,特别是涉及一种基于救生船的水域紧急救生方法。
背景技术:
2.在游泳池、海滩、江河湖泊等水域,人们经常会进行集中游泳等水域活动,在活动进行中,需要配备救生人员进行安保,防止有人在水中遇到危险,一般救生人员数量有限,很难对所有活动人员进行监控,因此不一定能发现有人遇险,且发现有人遇到危险时,救生人员也难以快速响应以对遇险人员进行施救。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本发明提供一种监控全面且响应快速的基于救生船的水域紧急救生方法。
4.技术方案:为实现上述目的,本发明的一种基于救生船的水域紧急救生方法,应用于救生系统,所述救生系统包括移动救生船、接收器以及定位桩;所述移动救生船包括船体、动力组件、第一控制单元与第一通信单元;所述接收器包括佩戴部、第二控制单元、第二通信单元以及交互单元;所述定位桩有三个,每个所述定位桩均具备第三控制单元、高精度gps模块以及第三通信单元;所述第一控制单元、第二控制单元、第三通信单元相互之间可进行通信;所述方法包括如下步骤:
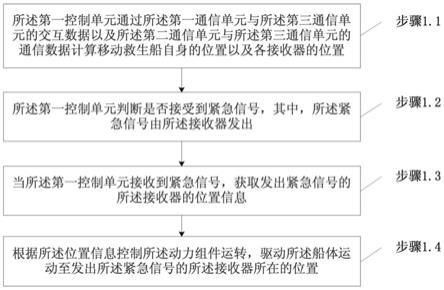
5.步骤1.1),所述第一控制单元通过所述第一通信单元与所述第三通信单元的交互数据以及所述第二通信单元与所述第三通信单元的通信数据计算移动救生船自身的位置以及各接收器的位置;
6.步骤1.2),所述第一控制单元判断是否接受到紧急信号,其中,所述紧急信号由所述接收器发出;
7.步骤1.3),当所述第一控制单元接收到紧急信号,获取发出紧急信号的所述接收器的位置信息;
8.步骤1.4),根据所述位置信息控制所述动力组件运转,驱动所述船体运动至发出所述紧急信号的所述接收器所在的位置。
9.进一步地,所述步骤1.1)中所述交互数据包括每个所述定位桩的所述第三通信单元发送给所述第一通信单元的第一数据包,所述第一数据包的内容包括定位桩的编号、所述第三通信单元发出第一数据包时的第一时间信息以及所述定位桩的所述高精度gps模块获取的第一位置信息;所述步骤1.1)中所述通信数据包括各所述第二通信单元与各所述第三通信单元通信所产生的第二数据包,所述第二数据包包括第二通信单元向所述第三通信单元发送的第三数据包的内容、所述第三通信单元接收到所述第三数据包时的第三时间信息以及所述第三通信单元接收到第二数据包时所述高精度gps模块获取的第二位置信息;所述第三数据包的内容包括对应的所述接收器的序列号、所述第二通信单元向所述第三通
信单元发出第三数据包时的第二时间信息;
10.所述步骤1.1)具体包括如下步骤:
11.步骤2.1),根据所述第一数据包的数据以及所述第一通信单元接收到各所述第一数据包的时间计算各所述定位桩与所述移动救生船之间的距离;
12.步骤2.2),根据各所述定位桩与所述移动救生船之间的距离以及各所述定位桩的高精度gps模块获取的第一位置信息计算所述移动救生船的位置;
13.步骤2.3),根据所述第二数据包的数据计算各所述接收器与各所述定位桩之间的距离,并根据同一所述接收器与不同所述定位桩之间的距离数据以及各所述定位桩的第二位置信息计算各所述接收器的位置。
14.进一步地,所述步骤1.1)之前还包括如下步骤:
15.步骤6.1),所述第一控制单元构建一数组,并设定循环周期,所述数组包含若干序列号,且数组中的每个序列号均为唯一;
16.步骤6.2),所述第一控制单元为每个处于使用状态的所述接收器的所述第二控制单元分配唯一序列号,并与之同步时间、数组以及循环周期;
17.步骤6.3),每个处于使用状态的所述接收器的所述第二控制单元在每个所述循环周期开始时以设定频率依次读取所述数组内的序列号,并将读取的序列号与本接收器的序列号对比,判断两者是否一致,若两者一致,所述第二控制单元向各所述定位桩的所述第三通信单元发送第三数据包。
18.进一步地,所述步骤1.1)之前还包括如下步骤:
19.步骤3.1),根据所述移动救生船自身的位置以及各接收器的位置生成分布地图。
20.进一步地,所述步骤1.4)具体包括如下步骤:
21.步骤4.1),规划到达发出所述紧急信号的接收器的最短路径,所述最短路径避开其他接收器的安全区域;
22.步骤4.2),控制所述动力组件运转使所述船体沿着所述最短路径达到发出所述紧急信号的接收器所在的位置。
23.进一步地,所述所述定位桩安装在具有动力装置并处于漂浮状态的漂浮体上,所述第三控制单元可控制所述漂浮体运动;所述方法还包括如下步骤:
24.步骤5.1),所述第一控制单元根据各所述定位桩的位置判断三个所述定位桩是否共线;
25.步骤5.2),若三个所述定位桩共线,则所述第一控制单元向各所述定位桩的第三控制单元发出指令,各所述第三控制单元根据接收到的指令控制各自所在的所述漂浮体运动,使得三个所述定位桩呈三角布局。
26.有益效果:本发明的基于救生船的水域紧急救生方法,通过使活动人员均佩戴接收器,移动救生船可通过定位桩获得自身位置与各接收器的位置,且移动救生船可对各接收器进行监控并及时运动至发出紧急信号的接收器所在位置对相关人员进行施救,监控全面且相应快速。
附图说明
27.附图1所示的救生系统的组成示意图;
28.附图2为移动救生船的系统组成示意图;
29.附图3为接收器的系统组成示意图;
30.附图4为定位桩的系统组成示意图;
31.附图5为基于救生船的水域紧急救生方法的流程示意图。
32.图中:1
‑
移动救生船;11
‑
船体;12
‑
动力组件;13
‑
第一控制单元;14
‑
第一通信单元;15
‑
环境探测传感器;16
‑
防倾覆单元;17
‑
智能救助单元;2
‑
接收器;21
‑
佩戴部;22
‑
第二控制单元;23
‑
第二通信单元;24
‑
交互单元;3
‑
定位桩;31
‑
第三控制单元;32
‑
高精度gps模块;33
‑
第三通信单元;25
‑
体征监测传感器;4
‑
漂浮体。
具体实施方式
33.下面结合附图对本发明作更进一步的说明。
34.本发明的基于救生船的水域紧急救生方法基于如附图1所示的救生系统,所述救生系统包括移动救生船1、接收器2以及定位桩3。
35.如附图1与附图2所示,所述移动救生船1包括船体11,所述船体11上安装有动力组件12、第一控制单元13与第一通信单元14,动力组件12可推动船体11运动。
36.如附图1与附图3所示,所述接收器2具备佩戴部21,所述佩戴部21上安装有第二控制单元22、第二通信单元23以及交互单元24,接收器2可以做成手环形式,佩戴部21为环形橡胶腕带;第二通信单元23可与第一通信单元14通信。交互单元24可为按钮等形式,当佩戴的用户触发交互单元24可发出紧急信号。此外,优选地,所述佩戴部21上还安装有体征监测传感器25,体征监测传感器25可监测用户的心率、体动频率等体征参数,第二控制单元22可根据体征参数与预设参照值的对比情况判断用户是否处在窒息、拼命挣扎(体现为肢体的快速往复运动,体动评率高于设定值)等状态,是则通过第二通信单元23向第一通信单元14发出紧急信号。
37.所述定位桩3至少有三个,三个定位桩3呈三角形布局,如附图1与附图4所示,每个所述定位桩3均具备第三控制单元31、高精度gps模块32以及第三通信单元33;所述第一控制单元13与第二控制单元22均可与第三通信单元33进行通信。定位桩3自带高精度gps模块32,可使在使用前不用对定位桩3的位置进行标定,且在某些具有较长的移动性的场合中,需要定位桩3随着活动人员进行移动,定位桩3可安装在具有动力装置并处于漂浮状态的漂浮体4上,漂浮体4的动力装置由第三控制单元31控制运转,无论定位桩3运动到什么位置,其搭载的高精度gps模块32均可获取其实时位置,定位桩3可一直作为移动救生船1与接收器2的定位参照物。
38.通过上述系统,移动救生船1的第一控制单元13可通过与三个定位桩3通信以确定其自身的位置,具体方法为,移动救生船1分别确定其与每个定位桩3的距离,并获取每个定位桩3的高精度gps模块32获取的位置数据,如此通过简单的计算即可获知移动救生船1自身的位置。此外,第一控制单元13还可通过三个定位桩3计算每个接收器2的位置,具体为先计算每个接收器2分别与每个定位桩3的距离,再根据三个定位桩3的gps位置计算每个接收器2的位置,如此第一控制单元13可掌握自身与所有接收器2的位置信息,每个接收器2只需要具有通信功能即可,无需配备高精度gps模块,可大幅减少接收器2的成本,接收器2为用户佩戴的终端,其损耗率较高,由于成本较低,损耗成本也较低,可减少整套系统的运行成
本。
39.当第一通信单元14收到紧急信号,第一控制单元13控制船体11运动至发出紧急信号的接收器2所在的位置。
40.优选地,所述船体11上还安装有环境探测传感器15。所述环境探测传感器15包括超声波探测器。环境探测传感器15可在船体11运动过程中探测船体11前进方向的前方是否存在障碍物,当探测船体11前进方向的前方存在障碍物,第一控制单元13可根据避障算法控制船体11进行避障运动。
41.第一控制单元13控制船体11运动至发出紧急信号的接收器2所在的位置后,船体11上可装载着救生人员对遇险人员进行施救。在优选的实施例中,所述船体11上安装有智能救助单元17以及防倾覆单元16。所述防倾覆单元16为伸缩式防倾板,其可在伸展状态与缩回状态之间切换,当其处于伸展状态,其为长条状,且其向深入水中的方向延伸。所述智能救助单元17包括救生网以及救生网收放机构,所述救生网收放机构可对所述救生网进行收放管理。该实施例中,第一控制单元13控制船体11运动至发出紧急信号的接收器2所在的位置后,第一控制单元13控制防倾覆单元16切换至伸展状态,并控制救生网收放机构放出救生网,救生网上可设置拉力传感器,当第一控制单元13检测到拉力传感器的拉力值高于设定值即判断遇险人员已攀住救生网,并控制救生网收放机构收回救生网以方便遇险人员上船,期间由于防倾覆单元16的作用,船体11不会由于偏向一边的作用力而倾覆。
42.如附图5所示,所述方法包括如下步骤:
43.步骤1.1),所述第一控制单元13通过所述第一通信单元14与所述第三通信单元33的交互数据以及所述第二通信单元23与所述第三通信单元33的通信数据计算移动救生船1自身的位置以及各接收器2的位置;
44.步骤1.2),所述第一控制单元13判断是否接受到紧急信号,其中,所述紧急信号由所述接收器2发出;
45.步骤1.3),当所述第一控制单元13接收到紧急信号,获取发出紧急信号的所述接收器2的位置信息;
46.步骤1.4),根据所述位置信息控制所述动力组件12运转,驱动所述船体11运动至发出所述紧急信号的所述接收器2所在的位置。
47.进一步地,所述步骤1.1)中所述交互数据包括每个所述定位桩3的所述第三通信单元33发送给所述第一通信单元14的第一数据包,所述第一数据包的内容包括定位桩3的编号、所述第三通信单元33发出第一数据包时的第一时间信息以及所述定位桩3的所述高精度gps模块32获取的第一位置信息;所述步骤1.1中所述通信数据包括各所述第二通信单元23与各所述第三通信单元33通信所产生的第二数据包,所述第二数据包包括第二通信单元23向所述第三通信单元33发送的第三数据包的内容、所述第三通信单元33接收到所述第三数据包时的第三时间信息以及所述第三通信单元33接收到第二数据包时所述高精度gps模块32获取的第二位置信息;所述第三数据包的内容包括对应的所述接收器2的序列号、所述第二通信单元23向所述第三通信单元33发出第三数据包时的第二时间信息;
48.所述步骤1.1)具体包括如下步骤:
49.步骤2.1),根据所述第一数据包的数据以及所述第一通信单元14接收到各所述第一数据包的时间计算各所述定位桩3与所述移动救生船1之间的距离;
50.步骤2.2),根据各所述定位桩3与所述移动救生船1之间的距离以及各所述定位桩3的高精度gps模块32获取的第一位置信息计算所述移动救生船1的位置;
51.步骤2.3),根据所述第二数据包的数据计算各所述接收器2与各所述定位桩3之间的距离,并根据同一所述接收器2与不同所述定位桩3之间的距离数据以及各所述定位桩3的第二位置信息计算各所述接收器2的位置。
52.进一步地,所述步骤1.1)之前还包括如下步骤:
53.步骤6.1),所述第一控制单元13构建一数组,并设定循环周期,所述数组包含若干序列号,且数组中的每个序列号均为唯一;
54.步骤6.2),所述第一控制单元13为每个处于使用状态的所述接收器2的所述第二控制单元22分配唯一序列号,并与之同步时间、数组以及循环周期;
55.步骤6.3),每个处于使用状态的所述接收器2的所述第二控制单元22在每个所述循环周期开始时以设定频率依次读取所述数组内的序列号,并将读取的序列号与本接收器2的序列号对比,判断两者是否一致,若两者一致,所述第二控制单元22向各所述定位桩3的所述第三通信单元33发送第三数据包。
56.上述步骤6.1)
‑
6.3)中是基于自行构建的数组对接收器2进行管理,实际使用中,频繁地有原先处于使用状态的接收器2进入非使用状态或有新的接收器2进入使用状态,因此,第一控制单元13需要频繁为第二控制单元22分配序列号以及收回序列号,管理上较为麻烦。因此,在优选的实施例中,基于伪随机序列对接收器2进行管理,具体地,每个接收器2进入使用状态时,其第二控制单元22根据进入使用状态的时间生成对应于该接收器2的序列号,该序列号是伪随机序列中的一部分,由于每个接收器2进入使用状态的时间不同,因此,可保证每个接收器2对应的序列号互不相同;所有处于使用状态的接收器2的第二控制单元22同步循环读取所述伪随机序列,并对比当前读取的序列号与接收器2对应的序列号是否一致,若一致,则所述第二控制单元22向各所述定位桩3的所述第三通信单元33发送第三数据包。由于各接收器2的序列号不一样,因此,读取到伪随机序列中与自身序列号一致的序列号的时间不同,如此可将所有接收器2发送第三数据包的时间错开,可有效防止信道堵塞导致丢包的情况发送。
57.进一步地,所述步骤1.1)之前还包括如下步骤:
58.步骤3.1),根据所述移动救生船1自身的位置以及各接收器2的位置生成分布地图。
59.进一步地,所述步骤1.4)具体包括如下步骤:
60.步骤4.1),规划到达发出所述紧急信号的接收器2的最短路径,所述最短路径避开其他接收器2的安全区域;
61.步骤4.2),控制所述动力组件12运转使所述船体11沿着所述最短路径达到发出所述紧急信号的接收器2所在的位置。
62.进一步地,所述所述定位桩3安装在具有动力装置并处于漂浮状态的漂浮体4上,所述第三控制单元31可控制所述漂浮体4运动;所述方法还包括如下步骤:
63.步骤5.1),所述第一控制单元13根据各所述定位桩3的位置判断三个所述定位桩3是否共线;
64.步骤5.2),若三个所述定位桩3共线,则所述第一控制单元13向各所述定位桩3的
第三控制单元31发出指令,各所述第三控制单元31根据接收到的指令控制各自所在的所述漂浮体4运动,使得三个所述定位桩3呈三角布局。
65.本发明的基于救生船的水域紧急救生方法,通过使活动人员均佩戴接收器,移动救生船可通过定位桩获得自身位置与各接收器的位置,且移动救生船可对各接收器进行监控并及时运动至发出紧急信号的接收器所在位置对相关人员进行施救,监控全面且相应快速。
66.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1