一种多级传动仿生蝠鲼胸鳍驱动装置
1.本专利涉及一种多级传动仿生蝠鲼胸鳍驱动装置,属于仿生机器人技术领域。
背景技术:
2.随着海洋资源的研究和开发,所需水下机器人的技术要求越来越高。然而,众多水下机器人在海洋复杂环境中针对水下安全搜救、科研教学、水下考古、渔业等的表现并不理想,这严重制约着海洋资源的开发和利用。水下机器人技术经过不断发展,仿生蝠鲼机器人显示出独特优势。目前,仿生蝠鲼的研究为了还原蝠鲼的胸鳍,主要采用电机驱动和新型软体材料制作的“肌肉驱动”。电机驱动能够提供较大的动力,提高机器人的稳定性。然而,该方式由于刚体的弹性限制,使得胸鳍还原度很低,难以体现出蝠鲼胸鳍优势,无法有效提高游动效率。新材料做成的“肌肉”驱动蝠鲼的运动,可以最大程度还原胸鳍的运动,提高机器人性能,使机器人更加贴合真实的蝠鲼。但新材料做成的“肌肉”驱动力小,极大限制了仿生蝠鲼的游动速度。因此,如何合理地进行仿生蝠鲼胸鳍设计是提高仿生蝠鲼机器人水下工作效率亟需解决的难题。
3.针对该问题,提出一种多级传动仿生蝠鲼胸鳍驱动装置。该思想来源于已发表专利[黄豪彩.仿蝠鲼胸鳍结构及仿蝠鲼机器人:中国,cn113044194a.],该专利结构主要包括胸鳍骨架,前缘绳,后缘绳,柔性鳍皮。其胸鳍骨架结构中主要包括行星架,锥齿轮,电机基座,驱动电机。
[0004]
该文献所提到的蝠鲼胸鳍骨架具有多种自由度,并且提高了仿生效果和仿生蝠鲼的游动效率。但其骨架结构薄弱,难以承受大的冲击力,稳定性较差。由于采用了多个电机,一方面使得控制难度增加,另一方面增大仿生蝠鲼的噪音。基于此,提出了本发明。
技术实现要素:
[0005]
针对上述存在技术的不足,本专利提供一种多级传动仿生蝠鲼胸鳍驱动装置,利用齿轮组传递动力,采用两对齿数比1:2的锥齿轮组成传动核心部件,并通过传动轴来形成多级传动结构。最后,通过将第一个传动轴与电机相连,当传动轴转动时,胸鳍的每相邻两节之间会发生相对转动,由于水的阻力存在,胸鳍每一节尾部的软体部位会变形,从而模拟蝠鲼的胸鳍摆动,达到提高游动效率和游动速率的效果。
[0006]
本发明解决其技术问题所采取的技术方案是:一种多级传动仿生蝠鲼胸鳍驱动装置,其特征在于:主要包括胸鳍第零节、胸鳍第一节、胸鳍第二节、胸鳍第三节和软体,胸鳍第零节为胸鳍与主体的连接体,胸鳍第一节、胸鳍第二节和胸鳍第三节依次连接形成动力臂,胸鳍第一节盖板(大)和胸鳍第一节盖板(小)安装在胸鳍第一节上的上方,胸鳍第二节盖板(大)和胸鳍第二节盖板(小)安装在胸鳍第二节的上方,胸鳍第三节盖板安装在胸鳍第三节上。
[0007]
所述胸鳍第零节和胸鳍第一节中传动杆有外部电机控制转动,胸鳍第一节和胸鳍第二节通过铰接杆铰接,在两个铰支座之间安装由小锥齿轮,加工后的大锥齿轮,未加工的
大锥齿轮组成的齿轮组,小锥齿轮安装在传动杆的轴向,加工后的大锥齿轮,未加工的大锥齿轮安装在铰接杆的轴向,在锥齿轮与胸鳍的接触面均安装了推力轴承和深沟球轴承来减小摩擦;在齿轮组中,小锥齿轮和未加工的大锥齿轮与相连的杆件通过销钉固连,加工后的大锥齿轮与铰接杆不进行固连,铰接杆与胸鳍第一节通过销钉固连;软体第一节与胸鳍第一节通过卡槽连接在胸鳍第一节后方。
[0008]
所述胸鳍第一节与胸鳍第二节和所述胸鳍第二节和胸鳍第三节;这两个连接部位与胸鳍第零节和胸鳍第一节的连接方式相同;但在胸鳍第一节与胸鳍第二节的连接处,两个大锥齿轮要相对于上一个连接部位(胸鳍第零节和胸鳍第一节的连接处)调换安装位置,并且铰接杆固连与胸鳍第二节上,软体第二节与胸鳍第二节通过卡槽连接在胸鳍第二节后方;胸鳍第二节和胸鳍第三节的连接处只需要一个小锥齿轮和一个加工后的大锥齿轮,铰接杆固连于胸鳍第三节上,软体第三节与胸鳍第三节通过卡槽连接在胸鳍第三节后方,软体第四节连接在胸鳍第三节的左侧。
[0009]
所述软体第一节固连于胸鳍第一节后方,所述软体第二节固连于胸鳍第二节后方,所述软体第三节固连于胸鳍第三节后方,所述软体第四节安装在胸鳍第三节左侧。
[0010]
本发明带来的有益效果:一种多级传动仿生蝠鲼胸鳍驱动装置,其主要包括主要包括胸鳍第零节、胸鳍第一节、胸鳍第二节、胸鳍第三节和软体。提高仿生蝠鲼的还原度,使仿生蝠鲼的胸鳍运动规律更加贴合真实的蝠鲼。简化仿生蝠鲼胸鳍的控制方法,仅通过改变动力输入轴的转动规律即可控制蝠鲼的运动。整个装置强度较高,可以抵抗较大的冲击,提高装置稳定性。
附图说明
[0011]
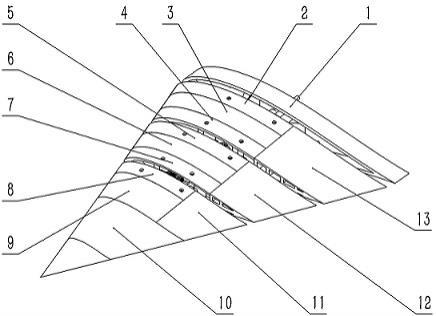
图1为胸鳍整体示意图;图2为胸鳍第零节与第一节连接正视图;图3为图2中a-a处剖视图;图4为胸鳍第一节与第二节连接正视图;图5为图4中b-b处剖视图;图6为胸鳍第二节与第三节连接正视图;图7为图6中c-c处剖视图。
[0012]
图中:1-胸鳍第零节,2-胸鳍第一节盖板(大),3-胸鳍第一节,4-胸鳍第一节盖板(小),5-胸鳍第二节盖板(大),6-胸鳍第二节,7-胸鳍第二节盖板(小),8-胸鳍第三节盖板,9-胸鳍第三节,10-软体第四节,11-软体第三节,12-软体第二节,13-软体第一节,14-传动杆,15-铰接杆,16-深沟球轴承,17-推力球轴承,18-小锥齿轮,19-加工后的大锥齿轮,20-未加工的大锥齿轮。
具体实施方式
[0013]
下面将结合附图,对本发明进行详细说明。
[0014]
其中相同的零部件用相同的附图标记表示,销钉未在图中画出,通过文字叙述。需要说明的是,下面描述中使用的词语“前方”、“后方”、“左侧”、“右侧”、“上方”、“下方”等词语指附图中的方向,以便于叙述。
[0015]
本发明一种多级传动仿生蝠鲼胸鳍传动装置,主要包括胸鳍第零节、胸鳍第一节、胸鳍第二节、胸鳍第三节和软体。以下实例参照图1~7。
[0016]
如图1所示,一种多级传动仿生蝠鲼胸鳍驱动装置,主要包括胸鳍第零节1、胸鳍第一节3、胸鳍第二节6、胸鳍第三节9和软体。胸鳍第零节1为胸鳍与主体的连接体,胸鳍第一节3、胸鳍第二节6和胸鳍第三节9依次连接形成动力臂,胸鳍第一节盖板(大)2和胸鳍第一节盖板(小)安装在胸鳍第一节3上的上方,胸鳍第二节盖板(大)5和胸鳍第二节盖板(小)7安装在胸鳍第二节6的上方,胸鳍第三节盖板8安装在胸鳍第三节上。软体第一节13固连于胸鳍第一节3后方,软体第二节12固连于胸鳍第二节6后方,软体第三节11固连于胸鳍第三节9后方,软体第四节10安装在胸鳍第三节9左侧。
[0017]
如图2和图3所示,为本装置的胸鳍第零节和胸鳍第一节的连接正视图,传动杆14有外部电机控制转动,胸鳍第一节1和胸鳍第二节3通过铰接杆15铰接,在两个铰支座之间安装由小锥齿轮18,加工后的大锥齿轮19,未加工的大锥齿轮20组成的齿轮组,小锥齿轮18安装在传动杆14的轴向,加工后的大锥齿轮19,未加工的大锥齿轮20安装在铰接杆15的轴向,在锥齿轮与胸鳍的接触面均安装了推力轴承17和深沟球轴承16来减小摩擦。在齿轮组中,小锥齿轮18和未加工的大锥齿轮20与相连的杆件通过销钉固连,加工后的大锥齿轮19与铰接杆15不进行固连,铰接杆15与胸鳍第一节通过销钉固连。软体第一节13与胸鳍第一节3通过卡槽连接在胸鳍第一节3后方。
[0018]
如图4和图5所示,为本装置的胸鳍第一节3与胸鳍第二节12的连接正视图。如图6和图7所示,为本装置的胸鳍第二节12和胸鳍第三节11的连接正视图。这两个连接部位与胸鳍第零节1和胸鳍第一节3的连接方式相同。但在胸鳍第一节3与胸鳍第二节12的连接处,两个大锥齿轮要相对于上一个连接部位(胸鳍第零节1和胸鳍第一节3的连接处)调换安装位置,并且铰接杆15固连与胸鳍第二节6上,软体第二节12与胸鳍第二节6通过卡槽连接在胸鳍第二节6后方。胸鳍第二节6和胸鳍第三节8的连接处只需要一个小锥齿轮18和一个加工后的大锥齿轮19,铰接杆15固连于胸鳍第三节9上,软体第三节11与胸鳍第三节9通过卡槽连接在胸鳍第三节9后方,软体第四节10连接在胸鳍第三节9的左侧。
[0019]
该装置的优越性主要体现在如下方面:一是保证仿生蝠鲼的游动速度且提高游动效率。二是提高仿生蝠鲼的还原度,降低仿生蝠鲼对水下生态的影响。三是分部件设计,降低后期维修成本,提高零件复用率。
[0020]
最后应说明的是:以上实施例仅用以说明本发明而并非限制本发明所描述的技术方案;因此,尽管本说明书参考上述实施例对本发明已进行了比较详细的说明,但是,本领域普通技术人员应当理解,仍然可以对本发明进行修改或等同替换;而一切不脱离本发明精神和范围的技术方案及其改进,其均应涵盖在本发明的权利要求范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1