一种船舶清理保养装置及其清理保养方法与流程
8、錾子2-9和锤头2-10;
15.所述伸缩杆ⅵ2-1的顶端与机械臂ⅰ2-3的尾端相连接,所述机械臂ⅰ2-3的首端与360度云台
ⅴ
2-5相连接,所述360度云台
ⅴ
2-5与270度电动转轴2-7相连接,所述270度电动转轴2-7上设置錾子2-9;
16.所述伸缩杆ⅶ2-2的顶端与机械臂ⅱ2-4的尾端相连接,所述机械臂ⅱ2-4的首端与360度云台ⅵ2-6相连接,所述360度云台ⅵ2-6与固定架2-8相连接,所述固定架2-8上设置锤头2-10;
17.所述錾子2-9和锤头2-10配合使用。
18.一种船舶清理保养装置,所述保养装置4包括伸缩杆
ⅷ
4-1、伸缩杆
ⅸ
4-2、机械臂ⅲ4-3、机械臂ⅳ4-4滚刷ⅰ4-5、滚刷ⅱ4-6和动力箱4-11;
19.所述伸缩杆
ⅷ
4-1与伸缩杆
ⅸ
4-2的底端均与动力箱4-11相连接,动力箱4-11为伸缩杆
ⅷ
4-1与伸缩杆
ⅸ
4-2提供动力;
20.所述伸缩杆vii4-1的顶端与机械臂iii4-3的尾端相连接,所述机械臂iii4-3的首端与滚刷i 4-5相连接;
21.所述伸缩杆ix4-2的顶端与机械臂iv4-4的尾端相连接,所述机械臂iv4-4的首端与滚刷ii 4-6相连接。
22.一种船舶清理保养装置,所述图像采集装置5包括伸缩杆iv5-1、360度云台iv5-2、360度电动转轴5-3及摄像头5-4,所述伸缩杆iv5-1的顶端设置360度云台iv5-2,所述360度云台iv5-2的顶端设置360度电动转轴5-3,所述360度电动转轴5-3上设置摄像头5-4。
23.一种基于船舶清理保养装置的清理保养方法,所述保养方法包括以下步骤:
24.步骤1:利用摄像头对船身进行拍摄进行图像采集;
25.步骤2:对图像数据进行预处理;
26.步骤3:将预处理得图像数据行图像特征点的提取;
27.步骤4:将提取的图像特征点进行藤壶清除与上油保养的判断。
28.一种基于船舶清理保养装置的清理保养方法,所述步骤2预处理具体为,对图像进行去噪,以除去孤立的噪声点,获得预处理后图像;
29.对预处理后图像进行边缘提取。
30.一种基于船舶清理保养装置的清理保养方法,所述边缘提取具体为,susan算法将圆形窗口模板应用于图像,从而给出各个方向的相应图像,将窗口中心置于图像的每一个位置上,计算窗口中心点r0与窗口内其他像素点r具有相近亮度的点的个数n(r0),以确定该像素是否是图像边缘点:
[0031][0032]
其中,c(r,r0)表示窗口内点r的亮度i(r)与窗口中心点r0的亮度i(r0)的相似程度:
[0033][0034]
其中,t表示亮度阈值;当两点亮度之差小于t时,c(r,r0)=1。
[0035]
一种基于船舶清理保养装置的清理保养方法,所述步骤3图像特征点提取具体为,lbp特征提取算法适合船身具有藤壶的图像这种局部差异大的部分,灰度分布不规则的图像;lbp特征值的计算公式为:
[0036][0037]
其中(xc,yc)是中心像素,ic和i
p
分别是中心像素和邻域像素的灰度值,s是一个函数,所述s为公式,
[0038][0039][0040]
其中d
t
公式为:
[0041][0042]
其中tj和tk分别代表由lbp算法提取出的第j个候选像素和第k个聚类中心的颜色值,t代表颜色的归一化因子。
[0043]
一种基于船舶清理保养装置的清理保养方法,所述步骤4具体为,以图像颜色分界线将特征点图像分为藤壶部分、船身漆面部分,分别计算藤壶部分、船身漆面部分中特征点与图像颜色分界线的平均坐标距离;藤壶部分与船身漆面部分的平均坐标距离相差超过设定阈值时,判定为需要进行清理藤壶,反之则进行船身保养。
[0044]
本发明的有益效果是:
[0045]
本发明的藤壶切割装置配合藤壶清理装置,既可以对大面积多层附着的藤壶进行快速清理,又可以对附着在漆层的藤壶进行精细清理,减少对漆面的损坏。
[0046]
本发明的图像识别针对藤壶和船身漆面颜色纹理的不同进行识别判断,从而控制船舶清理保养装置进行工作。
附图说明
[0047]
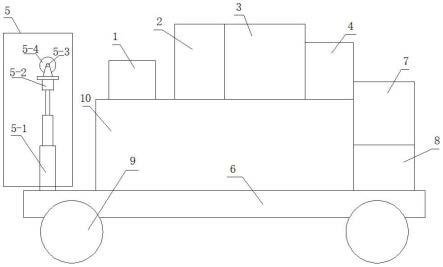
图1是本发明的结构示意图。
[0048]
图2是本发明的藤壶切割装置结构示意图。
[0049]
图3是本发明的藤壶清理装置结构示意图。
[0050]
图4是本发明的清灰装置结构示意图。
[0051]
图5是本发明的保养装置结构示意图。
[0052]
图6是本发明的方法流程图。
[0053]
藤壶切割装置1、伸缩杆
ⅴ
1-1、切割锯1-2、固定杆1-3、动力电机1-4、延长杆1-5、伸缩箱ⅰ1-6;
[0054]
藤壶清理装置2、伸缩杆ⅵ2-1、伸缩杆ⅶ2-2、机械臂ⅰ2-3、机械臂ⅱ2-4、360度云台
ⅴ
2-5、360度云台ⅵ2-6、270度电动转轴2-7、固定架2-8、錾子2-9、锤头2-10、伸缩箱ⅱ2-11;
[0055]
清灰装置3、伸缩杆ⅰ3-1、伸缩杆ⅱ3-2、伸缩杆ⅲ3-3、铲刀3-4、擦拭支撑板3-5-1、卡扣3-5-2、吹风机3-6、360度云台ⅰ3-7、180度电动转轴ⅰ3-8、360度云台ⅲ3-9、180度电动转轴ⅲ3-10、伸缩箱ⅲ3-11、随行水箱3-12
[0056]
保养装置4、伸缩杆
ⅷ
4-1、伸缩杆
ⅸ
4-2、机械臂ⅲ4-3、机械臂ⅳ4-4、滚刷ⅰ4-5、滚刷ⅱ4-6;
[0057]
图像采集装置5、伸缩杆ⅳ5-1、360度云台ⅳ5-2、360度电动转轴5-3、摄像头5-4;
[0058]
底板6、油箱7、水箱8、行走轮9、工具箱10。
具体实施方式
[0059]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0060]
一种船舶清理保养装置,所述清理保养装置包括藤壶切割装置1、藤壶清理装置2、清灰装置3、保养装置4和图像采集装置5;
[0061]
所述图像采集装置5、藤壶切割装置1、藤壶清理装置2、清灰装置3和保养装置4依次排列在底板6上,所述底板6底端设置行走轮9,所述底板6的尾端设置水箱8与油箱7;
[0062]
所述藤壶切割装置1、藤壶清理装置2、清灰装置3和保养装置4均装入工具箱10内,所述水箱8的顶端设置油箱7,所述底板6从前到后依次为图像采集装置5、工具箱10及水箱8;
[0063]
所述清灰装置3包括伸缩杆ⅰ3-1、伸缩杆ⅱ3-2、伸缩杆ⅲ3-3、铲刀3-4、自动上水擦拭块和吹风机3-6;
[0064]
所述伸缩杆ⅰ3-1的顶端设置360度云台ⅰ3-7,所述360度云台ⅰ3-7的顶端设置180度电动转轴ⅰ3-8,所述180度电动转轴ⅰ3-8上设置铲刀3-4;
[0065]
所述伸缩杆ⅱ3-2的顶端设置自动上水擦拭块;
[0066]
所述伸缩杆ⅲ3-3的顶端设置360度云台ⅲ3-9,所述360度云台ⅲ3-9的顶端设置180度电动转轴ⅲ3-10,所述180度电动转轴ⅲ3-10上设置吹风机3-6;
[0067]
所述自动上水擦拭块包括擦拭支撑板3-5-1,所述擦拭支撑板3-5-1的背面均布四个卡扣3-5-2,所述卡扣3-5-2卡紧擦拭块。
[0068]
对于图像识别出个别有附着物的部分采用清灰装置3中的铲刀3-4进行清理,一般情况下使用自动上水擦拭块配合吹风机3-6进行擦拭与即使烘干,防止沾染更多空气中的附着物。吹风机3-6的电池装入伸缩箱ⅲ3-11内与伸缩杆共用。
[0069]
一种船舶清理保养装置,所述藤壶切割装置1包括伸缩杆
ⅴ
1-1、切割锯1-2、固定杆1-3、动力电机1-4及延长杆1-5,所述伸缩杆
ⅴ
1-1的顶端设置固定杆1-3,所述固定杆1-3顶端通过转轴套与延长杆1-5相连接,所述延长杆1-5的一端与切割锯1-2进行紧固连接,所述延长杆1-5的另一端与动力电机1-4的输出轴相连接,且固定杆1-3为动力电机1-4做支撑。
[0070]
接到指令后,利用单片机控制即可为现有技术,将伸缩杆
ⅴ
1-1升至需要的高度,可根据船身与清理保养装置的位置确认切割锯1-2在清理保养装置的左侧或右侧,将切割
锯1-2、动力电机1-4与延长杆1-5安装在固定杆1-3上,启动动力电机1-4对藤壶进行切割。
[0071]
一种船舶清理保养装置,所述藤壶清理装置2包括伸缩杆ⅵ2-1、伸缩杆ⅶ2-2、机械臂ⅰ2-3、机械臂ⅱ2-4、360度云台
ⅴ
2-5、360度云台ⅵ2-6、270度电动转轴2-7、固定架2-8、錾子2-9和锤头2-10;
[0072]
所述伸缩杆ⅵ2-1的顶端与机械臂ⅰ2-3的尾端相连接,所述机械臂ⅰ2-3的首端与360度云台
ⅴ
2-5相连接,所述360度云台
ⅴ
2-5与270度电动转轴2-7相连接,所述270度电动转轴2-7上设置錾子2-9;
[0073]
所述伸缩杆ⅶ2-2的顶端与机械臂ⅱ2-4的尾端相连接,所述机械臂ⅱ2-4的首端与360度云台ⅵ2-6相连接,所述360度云台ⅵ2-6与固定架2-8相连接,所述固定架2-8上设置锤头2-10;
[0074]
所述錾子2-9和锤头2-10配合使用。
[0075]
对于藤壶与船身漆面特和的部分,采用錾子2-9配合锤头2-10,对藤壶进行清理,藤壶清理装置2采用伸缩杆配合机械臂的方式,再瞎用旋转云台寻找更精确的角度,使其对船身与藤壶的衔接处寻找更精准,清理效果更好,对船身破坏性最小。
[0076]
一种船舶清理保养装置,所述保养装置4包括伸缩杆
ⅷ
4-1、伸缩杆
ⅸ
4-2、机械臂ⅲ4-3、机械臂ⅳ4-4、滚刷ⅰ4-5和滚刷ⅱ4-6;
[0077]
所述伸缩杆
ⅷ
4-1的顶端与机械臂ⅲ4-3的尾端相连接,所述机械臂ⅲ4-3的首端与滚刷ⅰ4-5相连接;
[0078]
所述伸缩杆
ⅸ
4-2的顶端与机械臂ⅳ4-4的尾端相连接,所述机械臂ⅳ4-4的首端与滚刷ⅱ4-6相连接。
[0079]
对需要保养的船身部分利用泵通过油管,从油箱为滚刷ⅰ4-5和滚刷ⅱ4-6自动供油。滚刷ⅰ4-5和滚刷ⅱ4-6通过滚涂将油料涂到船身上。
[0080]
一种船舶清理保养装置,所述图像采集装置5包括伸缩杆ⅳ5-1、360度云台iv5-2、360度电动转轴5-3及摄像头5-4,所述伸缩杆iv5-1的顶端设置360度云台iv5-2,所述360度云台iv5-2的顶端设置360度电动转轴5-3,所述360度电动转轴5-3上设置摄像头5-4。可控制摄像头横向360度旋转拍摄,竖向360度拍摄,图像采集无死角。
[0081]
一种基于船舶清理保养装置的清理保养方法,所述保养方法包括以下步骤:
[0082]
步骤1:利用摄像头对船身进行拍摄进行图像采集;
[0083]
步骤2:对图像数据进行预处理;
[0084]
步骤3:将预处理得图像数据行图像特征点的提取;
[0085]
步骤4:将提取的图像特征点进行藤壶清除与上油保养的判断。
[0086]
一种基于船舶清理保养装置的清理保养方法,所述步骤2预处理具体为,对图像进行去噪,以除去孤立的噪声点,获得预处理后图像;
[0087]
对预处理后图像进行边缘提取。
[0088]
一种基于船舶清理保养装置的清理保养方法,所述边缘提取具体为,susan算法将圆形窗口模板应用于图像,从而给出各个方向的相应图像,将窗口中心置于图像的每一个位置上,计算窗口中心点r0与窗口内其他像素点r具有相近亮度的点的个数n(r0),以确定该像素是否是图像边缘点:
[0089][0090]
其中,c(r,r0)表示窗口内点r的亮度i(r)与窗口中心点r0的亮度i(r0)的相似程度:
[0091][0092]
其中,t表示亮度阈值;当两点亮度之差小于t时,c(r,r0)=1。
[0093]
一种基于船舶清理保养装置的清理保养方法,所述步骤3图像特征点提取具体为,lbp特征提取算法适合船身具有藤壶的图像这种局部差异大的部分(有藤壶与无藤壶之间的差异),灰度分布不规则的图像;lbp特征值的计算公式为:
[0094][0095]
其中(xc,yc)是中心像素,ic和i
p
分别是中心像素和邻域像素的灰度值,s是一个函数,所述s为公式,
[0096][0097][0098]
其中d
t
公式为:
[0099][0100]
其中tj和tk分别代表由lbp算法提取出的第j个候选像素和第k个聚类中心的颜色值,t代表颜色的归一化因子。
[0101]
一种基于船舶清理保养装置的清理保养方法,所述步骤4具体为,以图像颜色分界线将特征点图像分为藤壶部分、船身漆面部分,分别计算藤壶部分、船身漆面部分中特征点与图像颜色分界线的平均坐标距离;藤壶部分与船身漆面部分的平均坐标距离相差超过设定阈值时,判定为需要进行清理藤壶,反之则进行船身保养。
[0102]
工作流程:首先将藤壶切割装置1组装进伸缩箱i 1-6;将藤壶清理装置2组装进伸缩箱ii 2-11;将清灰装置3组装进伸缩箱iii3-11,伸缩箱iii3-11的底端卡接随行水箱3-12;将保养装置4组装进伸缩箱iv4-7;再将伸缩箱i 1-6、伸缩箱ii 2-11、伸缩箱iii3-11与伸缩箱iv4-7依次码进工具箱10,工具箱10放置在底板6上,并在工具箱10的尾端放置水箱8与油箱7,水箱8通过水管为随行水箱3-12供水,油箱7为滚刷i 4-5和滚刷ii 4-6供油对船身进行保养。
[0103]
将图像采集装置5装在底板6的首端,工具箱10在图像采集装置5的后端;
[0104]
图像采集装置5利用摄像头无死角的旋转拍摄靠岸的船身的图片,确定藤壶吸附的位置,将拍摄的图片传输进上位机进行图片的预处理即特征点的提取与特征点的比较;预处理主要通过对图像进行去噪,为后续提取特征点做准备,使用susan算法针对藤壶附着
的颜色与普通船身的外漆面颜色区别大的图像进行图像特征点的边缘提取,在利用lbp特征提取算法对图片中同时出现藤壶与船身的图片进行处理,确定藤壶的部分与船身部分,确定藤壶的部分,首先利用藤壶切割装置1,开启切割锯1-2将厚的藤壶,即距离船身漆面1cm以上的藤壶部分进行切除,在控制藤壶清理装置2对附着在船身漆面上的藤壶进行翘起清除,清楚后人工补漆。
[0105]
对识别出船身本身漆面的部分启动保养装置4用油箱7中的油供给滚刷ⅰ4-5和滚刷ⅱ4-6控制机械臂对船身的漆面进行上油保养。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1