一种水下机器人用无人母船的制作方法
1.本实用新型涉及有缆潜水器技术领域,具体为一种水下机器人用无人母船。
背景技术:
2.水面无人船是一种不需要遥控,可以凭借gps定位及自身传感器进行控制,按照预先设计的任务完成工作的水面设备。遥控无人潜水器是一种通过遥控控制的,可以应用于水下观察,水下施工作业的水下机器人。现有的水下机器人技术已经相对成熟,但其工作模式更多的是采用近岸时岸上控制,离岸时需要人员乘船出海进行控制。缺点是投放回收水下机器人相对困难,需要多名人员登船操作母船及水下机器人,会消耗大量人力,并且带有一定的风险。
技术实现要素:
3.本实用新型要解决的技术问题是提供以一种水下机器人用无人母船,能够高效便捷地收放水下机器人,实现远程操作水下机器人,避免人员出海。
4.本实用新型是通过以下技术方案解决上述技术问题的:
5.一种水下机器人用无人母船,包括左船体、右船体、第一连接板、电子舱、连接件、线盘收放机构、放置回收机构;
6.所述左船体与所述右船体通过所述第一连接板连接,所述电子舱通过多个所述连接件连接到左船体和右船体之间,所述线盘收放机构和所述放置回收机构均固定安装在所述左船体和所述右船体上;
7.所述放置回收机构包括龙门架、电动绞盘、绞线、笼壁、笼底,所述龙门架固定在所述左船体和右船体上,所述电动绞盘固定在所述龙门架上,所述绞线的一端连接在所述电动绞盘上,另一端连接到所述笼底上,所述笼壁固定在所述左船体和所述右船体之间。
8.本实用新型中无人母船的船体采用左船体和右船体的双体船作为平台,无人母船的控制系统、感知系统、通信系统的设备及仪器均放置在电子舱内,线盘收放机构用于实现对水下机器人的的自动收放,放置收放机构用于实现自动释放和回收水下机器人,从而能够高效便捷地收放水下机器人,实现远程操作水下机器人,避免人员出海,节省大量人力。
9.进一步地,所述笼底还包括底板、前挡板、侧挡板、斜挡板;所述前挡板垂直安装在所述底板的一侧,两个所述侧挡板分别垂直安装在所述底板上表面,且垂直连接在所述前挡板的一侧,两个所述侧挡板的安装位置略窄于所述底板,两个所述斜挡板分别垂直安装在所述底板两端上表面,且与所述侧挡板成一夹角。
10.进一步地,还包括侧壁和方架,两个所述侧壁分别垂直安装在所述底板的两侧,且垂直连接在所述前挡板的一侧,两个所述方架的一端分别垂直安装在所述底板的上表面,另一端与所述绞线连接。
11.进一步地,所述侧壁、所述前挡板、所述侧挡板和所述斜挡板共同围成直角梯形空间,所述方架的一端位于所述直角梯形空间内。
12.进一步地,所述线盘收放机构包括线盘、线盘中轴、线盘架、电机、脐带缆、第二连接板;所述第二连接板两端分别连接到所述左船体和所述右船体的上表面,两个所述线盘架分别位于所述第二连接板上,所述线盘中轴两端分别套有所述线盘,并分别通过轴承安装在所述线盘架上,所述脐带缆位于所述线盘上,并连接无人母船与水下机器人,所述电机位于所述线盘的侧面。
13.进一步地,还包括往复丝杆、小带轮、大带轮、滑块、定位光轴、传动带;所述往复丝杆的一端连接到所述线盘架上,另一端通过轴承安装在另一个所述线盘架上,所述小带轮安装在所述线盘中轴上靠近所述电机的一端,所述大带轮安装在所述往复丝杆上装有轴承的一端,所述传动带安装在所述小带轮和所述大带轮上,所述定位光轴的两端固定在两个所述线盘架上,且平行于所述往复丝杆,所述滑块穿过所述往复丝杆与所述定位光轴。
14.进一步地,所述滑块上有一个圆环,所述脐带缆穿过所述圆环。
15.进一步地,所述电子舱上有舱盖、天线和摄像头。
16.进一步地,所述连接件为l形。
17.进一步地,所述左船体和右船体整体呈流线型。
18.与现有技术相比,本实用新型提供了一种水下机器人用无人母船,具备以下有益效果:
19.1、本实用新型中无人母船的船体采用左船体和右船体的双体船作为平台,无人母船的控制系统、感知系统、通信系统的设备及仪器均放置在电子舱内,线盘收放机构用于实现对水下机器人的的自动收放,放置收放机构用于实现自动释放和回收水下机器人,从而能够高效便捷地收放水下机器人,实现远程操作水下机器人,避免人员出海,节省大量人力。
20.2、本实用新型中无人母船的船体较小,能够通过多种运输方式转移,运输方便。
21.3、本实用新型中放置收放机构的笼壁是由四块方形金属板构成的金属框架,笼壁与船体固定连接,用于保护水下机器人和船体。
22.4、本实用新型中放置收放机构的底板、前挡、两个侧挡板、两个斜挡板连接在一起,中间形成用于放置水下机器人的一侧面开口的腔体,笼底和水下机器人能够随着绞线的收放而可上下移动,收放水下机器人时安全便捷,前挡板、侧挡板、斜挡板能够对水下机器人进入腔体时的纵向和横向运动起到限位作用。
23.5、本实用新型中线盘收放机构中电机转动,带动线盘中轴与线盘转动,缠绕在线盘上的脐带缆可以收起或放下,脐带缆用于连接无人母船船体与水下机器人,并传递信号。
24.6、本实用新型中线盘收放机构中线盘中轴上的小带轮、往复丝杆上的大带轮和传动带以带传动的方式一起为往复丝杆提供动力,定位光轴用于限制滑块的位置,脐带缆穿过滑块,能够在滑块的带动下实现自动排线。
25.7、本实用新型中舱盖安装在舱门处,便于检修电子舱内部的电子设备,天线能够实现建立船体、岸上、服务器三方互联信息通路,摄像头为高清摄像头,能够通过图像识别自动避障,并将视频信号传输到岸上,从而能够实现无人母船按照规划任务自动航行,自动避障。
附图说明
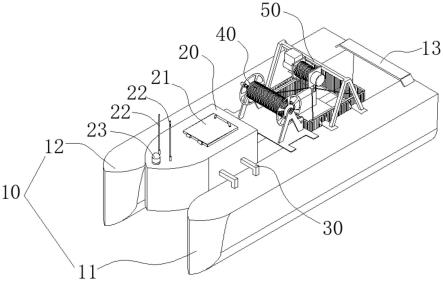
26.图1是本实用新型的水下机器人用无人母船的立体图;
27.图2是本实用新型的水下机器人用无人母船的主视图;
28.图3是本实用新型的水下机器人用无人母船的俯视图;
29.图4是本实用新型的水下机器人用无人母船的仰视图;
30.图5是本实用新型的水下机器人用无人母船的线盘收放机构的立体图;
31.图6是本实用新型的水下机器人用无人母船的线盘收放机构的主视图;
32.图7是本实用新型的水下机器人用无人母船的线盘收放机构的侧视图;
33.图8是本实用新型的图5中a处局部放大图;
34.图9是本实用新型的水下机器人用无人母船的放置回收机构的立体图;
35.图10是本实用新型的水下机器人用无人母船的放置回收机构放置水下机器人的立体图;
36.图11是本实用新型的水下机器人用无人母船的放置回收机构放置的笼底的立体图;
37.图中:10船体、11左船体、12右船体、13第一连接板、20电子舱、21舱盖、22天线、23摄像头、30连接件、40线盘收放机构、41线盘、411线盘中轴、412线盘架、42电机、43往复丝杆、411小带轮、422大带轮、45滑块、46定位光轴、47传动带、48脐带缆、49第二连接板、50放置回收机构、51龙门架、52电动绞盘、53绞线、54收放笼、541笼壁、542笼底、5421底板、5422前挡板、5423侧挡板、5424斜挡板、5425侧壁、5426方架。
具体实施方式
38.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
39.下面结合说明书附图以及具体的实施例对本实用新型的技术方案作进一步描述:
40.如图1-4所示,一种水下机器人用无人母船,包括:船体10、电子舱20、连接件30、线盘收放机构40、放置回收机构50;船体10采用双体船作为平台,包括左船体11和右船体12,左船体11和右船体12通过强度较高的第一连接板13连接,左船体11和右船体12均采用碳纤维结构,整体呈流线型,为船体10提供浮力和保护。
41.继续参阅图1,电子舱20位于左船体11和右船体12之间,并通过四个呈l形的连接件30连接到船体10,其中两个连接件30的一端分别焊接在电子舱20的舱体外侧,另一端分别焊接在左船体11的上表面,另外两个连接件30的一端分别焊接在电子舱20的舱体外侧,另一端分别焊接在右船体12的上表面,连接件30的中间为供电缆线通过的中空结构。
42.船体10使用船载电池提供动力,由螺旋桨推进器进行驱动,船载电池放置在船体10内,无人母船的控制系统、感知系统、通信系统的设备及仪器均放置在电子舱20内,感知系统包括gps系统、舱内感知系统、环境感知系统。控制系统主要负责分析,处理内外部信息,实现自主航行,自动避障的操作。通信系统可以与岸上建立通信,使岸上能够监控无人
母船的情况,以及中转水下机器人60的控制信号。
43.继续参阅图1,电子舱20包括舱盖21、天线22和摄像头23;电子舱20为铝合金舱体,顶端开有舱门,舱盖21安装在舱门处,用于检修电子舱20内部的电子设备;天线22和摄像头23均安装在电子舱20的顶端,两根天线22用于实现建立船体10、岸上、服务器三方互联信息通路,摄像头23为高清摄像头,能够通过图像识别自动避障,并将视频信号传输到岸上。
44.如图5-7所示,线盘收放机构40包括:线盘41、线盘中轴411、线盘架412、电机42、往复丝杆43、带轮、滑块45、定位光轴46、传动带47、脐带缆48、第二连接板49;线盘收放机构40通过第二连接板49连接到船体10上,第二连接板49两端分别连接到左船体11和右船体12的上表面,两个线盘架412的底部分别连接到第二连接板49的两端上表面,线盘中轴411可转动地穿过两个线盘41,两端分别通过轴承安装在线盘架412上,线盘41用于收放储藏脐带缆48,脐带缆48用于连接无人母船船体10与水下机器人60,并传递信号。线盘架412内部放置有无线控制模块,用于实现水下机器人60与船体10的信息数据无线传递,保持信息接收和传出。电机42位于线盘41的侧面,电机42的定子固定连接在线盘架412上,电机42的转子连接到线盘中轴411,电机42由船载电池供电,用于驱动线盘收放机构40,实现对连接水下机器人60的脐带缆48的自动收线和排线。
45.继续参阅图5,往复丝杆43的一端通过螺丝连接到线盘架412上,另一端通过轴承安装在另一个线盘架412上,带轮包括小带轮441和大带轮442,小带轮441安装在线盘中轴411上靠近电机42的一端,大带轮442安装在往复丝杆43上装有轴承的一端,传动带47安装在小带轮441和大带轮442上,带轮和传动带47以带传动的方式一起为往复丝杆43提供动力,定位光轴46的两端不可转动地固定安装在两个线盘架412上,且平行于往复丝杆43,用于限制滑块45的位置,参阅图8,滑块45穿过往复丝杆43与定位光轴46,滑块45的丝牙与往复丝杆43安装配合,滑块45上有一个圆环结构,起固定脐带缆48的作用。工作过程中,当脐带缆48需要收起或放开时,电机42转动,带动线盘中轴411与线盘41转动,缠绕在线盘41上的脐带缆48可以收起或放下。线盘中轴411开始转动后,在带传动的联动下,往复丝杠43开始旋转,带动滑块45沿着往复丝杆43和定位光轴46滑动,脐带缆48穿过圆环,即可在滑块45的带动下实现自动排线。
46.如图9-10所示,放置收放机构50包括:龙门架51、电动绞盘52、绞线53、收放笼54,收放笼54包括笼壁541、笼底542;参阅图1,龙门架51固定在船体10上,大扭矩的电动绞盘52通过螺丝固定在龙门架51上,用于驱动收放笼54升降。高强度的绞线53的一端缠绕在电动绞盘52的线轴上,另一端通过螺丝和螺母连接到收放笼54的方架5426上,放置收放机构50能够自动释放和回收水下机器人60。
47.参阅图11,笼底542包括:底板5421、前挡板5422、两个侧挡板5423、两个斜挡板5424、两个侧壁5425、两个方架5426;收放笼54是一个长方体无盖不锈钢笼,笼壁541与船体10固定连接,用于保护水下机器人60和船体10,笼壁541是由四块方形金属板构成的金属框架,所围面积与底板5421的面积相同,底板5421、前挡板5422、两个侧挡板5423、两个斜挡板5424连接在一起,中间形成一侧面开口的腔体,水下机器人60放置在腔体内,并位于地板5421上表面,笼底542和水下机器人60能够随着绞线53的收放而可上下移动,前挡板5422垂直安装在底板5421远离开口的一侧,两个侧挡板5423分别垂直安装在底板5421上表面,且垂直连接在前挡板5422朝向腔体的一侧,两个侧挡板5423的安装位置略窄于底板5421,两
个斜挡板5424分别垂直安装在底板5421两端上表面,且与侧挡板5423成45度角,前挡板5422、侧挡板5423、斜挡板5424能够对水下机器人60进入腔体时的纵向和横向运动起到限位作用。两个侧壁5425分别垂直安装在底板5421的两侧,且垂直连接在前挡板5422朝向腔体的一侧。侧壁5425、前挡板5422、侧挡板5423和斜挡板5424共同围成直角梯形空间。两个方架5426的一端分别垂直安装在底板5421的上表面,并位于侧壁5425、前挡板5422、侧挡板5423和斜挡板5424共同围成的直角梯形空间内,另一端的两个端部与绞线53连接。
48.工作原理:当无人母船到达目的水域,电动绞盘52带动笼底542下降,当笼底542下降到整个水下机器人60没入水中时,水下机器人60开启推进器,离开母船船体10。当回收水下机器人60时,先放下笼底542等到水下机器人60停靠到底板5421上的时候回收笼底542。所有的操作信号都是水下机器人60通过脐带缆48与母船进行数据传输,水下机器人60搭载水下摄像头,通过摄像头和返回的数据,双路并行确定各个动作执行到位。
49.在本实用新型的描述中,需要说明的是,术语“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
50.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1