一种水下机器人的安装架体的制作方法
1.本实用新型属于水下机器人技术领域,更具体地说,特别涉及一种水下机器人的安装架体。
背景技术:
2.水下机器人,是一种工作于水下的极限作业机器人,水下机器人由水面设备(包括操纵控制台、电缆绞车、吊放设备、供电系统等)和水下设备(包括中继器、潜水器和安装架组成),其中的安装架能够起到防撞保护的作用,但是为减轻机器人整体的重量,安装架普遍为镂空结构,在机器人在贴近海底滑行时,操作人员无法准确得知机器人与地面的距离,在滑行过程中安装架容易与地面产生剐蹭,容易对安装架造成一定的损伤,影响美观性,严重时甚至会对安装架内部的潜水器造成损伤,而使用高科技探测设备造价高,性价比较低。
3.于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种水下机器人的安装架体,以期达到更具有更加实用价值性的目的。
技术实现要素:
4.为了解决上述技术问题,本实用新型提供一种水下机器人的安装架体,以解决上述背景技术中提出的水下机器人在使用时,操作人员无法准确得知机器人与地面的距离,容易与海底面产生剐蹭的问题。
5.本实用新型一种水下机器人的安装架体的目的与功效,由以下具体技术手段所达成:
6.一种水下机器人的安装架体,包括潜水器主体、安装架机构、支撑组件、感应组件和高度感应报警装置;
7.所述安装架机构整体为方形框状结构;所述潜水器主体固定安装在安装架机构内部;所述支撑组件安装在安装架机构底部;所述感应组件顶部一端与安装架机构转动连接;所述高度感应报警装置安装在安装架机构内部,且高度感应报警装置内部与感应组件相连接;所述高度感应报警装置包括:连接滑板和升降板;连接滑板整体为t形结构,连接滑板一端滑动安装在安装架机构内部;升降板整体为梯形结构,升降板滑动安装在安装架机构内部,升降板一端与连接滑板固定连接,升降板通过连接滑板滑动安装在安装架机构内部。
8.进一步,所述安装架机构包括:架体和支杆;架体整体为方形框状结构,架体底部开设有方形凹槽,架体顶部与潜水器主体固定连接,架体对潜水器主体起到辅助防护作用;支杆为内部中空的长方体结构,支杆底部与架体固定连接,连接滑板滑动安装在支杆内部,升降板通过连接滑板滑动安装在安装架机构内侧。
9.进一步,所述支撑组件包括:滑动支撑板和磁石;滑动支撑板整体为u形结构,滑动支撑板顶部滑动安插在架体底部开设的滑槽内部,架体顶部一端设置有吸铁石,滑动支撑板能够起到辅助支撑感应转杆的作用;磁石固定安装在架体开设的滑槽内部。
10.进一步,所述感应组件包括:底部连接板、感应转杆、配重块和拉绳;底部连接板整
体为长方体结构,底部连接板固定安装在架体底部开设的方形凹槽内;感应转杆一端通过转轴与底部连接板转动连接;配重块整体为球形结构,配重块固定安装在感应转杆一端,配重块能够起到提高感应转杆一端重量的作用;拉绳底部与感应转杆一端相连接,拉绳顶部滑动插入到连接滑板内部。
11.进一步,所述高度感应报警装置包括:推板、感应开关和滑动块;推板整体为三角形结构,推板滑动安装在支杆滑槽内部,推板一端与升降板相接触,推板一端设置有弹簧,升降板在升降过程中能够起到推动推板向一侧滑动的作用;感应开关固定安装在支杆内部;滑动块为整体为长方体结构,滑动块滑动安装在支杆开设的滑槽内部,滑动块底部设置有弹簧,滑动块底部与拉绳固定连接。
12.与现有技术相比,本实用新型具有如下有益效果:
13.本实用新型通过在装置内部设置有感应组件和高度感应报警装置,在机器人水下潜行时,机器人底部的感应转杆会与海底地面相接触,拉绳拉力降低,拉绳顶部的弹簧回拉会带动升降板以及推板滑动,感应开关启动,根据机器人与地面距离的不同,推板会触发不同位置的感应开关,在最顶部一组感应开关开启时会发出警报,操作人员可以根据感应开关判断出机器人与地面的距离,防止机器人与地面发生碰撞;通过在装置内部设置有支撑组件,在不需要通过感应组件进行感应时,工作人员可以通过支撑组件对感应组件进行收纳。
附图说明
14.图1是本实用新型的主体轴侧视结构示意图。
15.图2是本实用新型的主体剖视结构示意图。
16.图3是本实用新型的安装架机构仰视结构示意图。
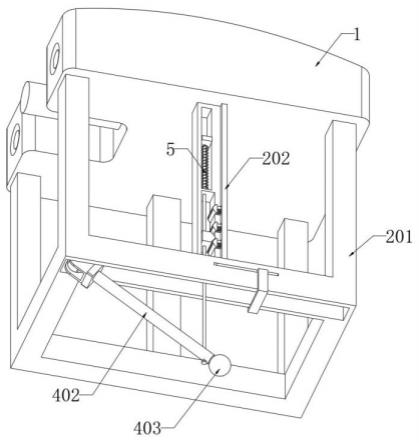
17.图4是本实用新型的感应组件仰视结构示意图。
18.图5是本实用新型的高度感应报警装置分解结构示意图。
19.图中,部件名称与附图编号的对应关系为:
20.1、潜水器主体;2、安装架机构;201、架体;202、支杆;3、支撑组件;301、滑动支撑板;302、磁石;4、感应组件;401、底部连接板;402、感应转杆;403、配重块;404、拉绳;5、高度感应报警装置;501、连接滑板;502、升降板;503、推板;504、感应开关;505、滑动块。
具体实施方式
21.下面结合附图和实施例对本实用新型的实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不能用来限制本实用新型的范围。
22.在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
23.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“相
连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
24.实施例:
25.如附图1至附图5所示:
26.本实用新型提供一种水下机器人的安装架体,包括潜水器主体1、安装架机构2、支撑组件3、感应组件4和高度感应报警装置5;
27.安装架机构2整体为方形框状结构;潜水器主体1固定安装在安装架机构2内部;支撑组件3安装在安装架机构2底部;感应组件4顶部一端与安装架机构2转动连接;高度感应报警装置5安装在安装架机构2内部,且高度感应报警装置5内部与感应组件4相连接;高度感应报警装置5包括:连接滑板501和升降板502;连接滑板501整体为t形结构,连接滑板501一端滑动安装在安装架机构2内部;升降板502整体为梯形结构,升降板502滑动安装在安装架机构2内部,升降板502一端与连接滑板501固定连接,升降板502通过连接滑板501滑动安装在安装架机构2内部。
28.如图3所示,安装架机构2包括:架体201和支杆202;架体201整体为方形框状结构,架体201底部开设有方形凹槽,架体201顶部与潜水器主体1固定连接,架体201对潜水器主体1起到辅助防护作用;支杆202为内部中空的长方体结构,支杆202底部与架体201固定连接,连接滑板501滑动安装在支杆202内部,升降板502通过连接滑板501滑动安装在安装架机构2内侧。
29.如图3所示,支撑组件3包括:滑动支撑板301和磁石302;滑动支撑板301整体为u形结构,滑动支撑板301顶部滑动安插在架体201底部开设的滑槽内部,架体201顶部一端设置有吸铁石,滑动支撑板301能够起到辅助支撑感应转杆402的作用;磁石302固定安装在架体201开设的滑槽内部。
30.如图4所示,感应组件4包括:底部连接板401、感应转杆402、配重块403和拉绳404;底部连接板401整体为长方体结构,底部连接板401固定安装在架体201底部开设的方形凹槽内;感应转杆402一端通过转轴与底部连接板401转动连接;配重块403整体为球形结构,配重块403固定安装在感应转杆402一端,配重块403能够起到提高感应转杆402一端重量的作用;拉绳404底部与感应转杆402一端相连接,拉绳404顶部滑动插入到连接滑板501内部。
31.如图5所示,高度感应报警装置5包括:推板503、感应开关504和滑动块505;推板503整体为三角形结构,推板503滑动安装在支杆202滑槽内部,推板503一端与升降板502相接触,推板503一端设置有弹簧,升降板502在升降过程中能够起到推动推板503向一侧滑动的作用;感应开关504固定安装在支杆202内部;滑动块505为整体为长方体结构,滑动块505滑动安装在支杆202开设的滑槽内部,滑动块505底部设置有弹簧,滑动块505底部与拉绳404固定连接。
32.本实施例的具体使用方式与作用:
33.本实用新型中, 在潜水器主体1处于水中2潜行时,由于感应转杆402和配重块403重量较重,感应转杆402会牵引滑动块505向下滑动,滑动块505底部的弹簧收缩,感应转杆402此时处于倾斜状态,在潜水器主体1接近海底地面时,感应转杆402与海底地面接触,感应转杆402和配重块403会使得拉绳404拉力降低,升降板502受到拉绳404顶部弹簧弹力的
影响而向上滑动,升降板502一端与推板503滑动相接触,推板503受力向一侧滑动,推板503会与感应开关504相接触,感应开关504启动,对此时潜水器主体1与地面的距离进行信息传送,在升降板502滑动到最顶部一组推板503处时,最顶部一组推板503一端的感应开关504启动,对操作人员发出警报,提醒工作人员小心操作,或者提高潜水器主体1的高度,在不需要使用感应组件4时,工作人员可以将感应转杆402受到架体201方形凹槽内,滑动支撑板301顶部的吸铁石与磁石302相接触,限制滑动支撑板301滑动,滑动支撑板301对感应转杆402起到辅助支撑作用。
34.本实用新型的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式,很多修改和变化对于本领域的普通技术人员而言是显而易见的,选择和描述实施例是为了更好说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1