一种襟翼极限位置保护系统及方法与流程
1.本技术属于飞行控制系统设计领域,特别涉及一种襟翼极限位置保护系统及方法。
背景技术:
2.襟翼控制系统由从操作装置到作动机构之间电气、机械或液压装置组成;用于采集驾驶员的操纵指令,形成控制信号,驱动襟翼作动线系运动,从而驱动襟翼按设定的轨迹偏转,通过增大机翼的面积和弯度增加飞机在起飞、着陆状态下的升力,降低起飞和着陆速度,缩小起飞和着陆的滑跑距离。
3.襟翼控制系统作为运输类飞机的一个关键系统,其对飞行安全和飞机性能指标的实现意义重大。在当前的襟翼控制系统设计中,部分机型仅采用离散位置信号反馈进行闭环控制,未进行保护功能设计,部分新机型采用了基于光电开关的极限位置保护设计,但由于光电开关需加入较大的减速齿轮机构将输出轴行程减小到360
°
以内,所以存在精度差、单点故障等缺点。安全性作为运输类飞机最为重要的一个指标要求,在新型飞机的襟翼控制系统设计中,设计一种极限位置保护功能,防止襟翼超行程运动,造成运动机构及舵面结构的损坏,十分必要。
4.因此,希望有一种技术方案来克服或至少减轻现有技术的至少一个上述缺陷。
技术实现要素:
5.本技术的目的是提供了一种襟翼极限位置保护系统及方法,以解决现有技术存在的至少一个问题。
6.本技术的技术方案是:
7.本技术的第一个方面提供了一种襟翼极限位置保护系统,包括:
8.襟翼动力驱动装置,所述襟翼动力驱动装置通过襟翼作动线系与襟翼连接,用于带动襟翼舵面按预设的轨迹偏转;
9.襟翼位置传感器,所述襟翼位置传感器设置在襟翼的翼尖上,用于获取所述襟翼的第一角度,所述襟翼位置传感器配置有齿轮减速机构;
10.输出轴位置传感器,所述输出轴位置传感器设置在所述襟翼动力驱动装置的输出轴上,用于获取所述襟翼动力驱动装置的输出轴的第二角度;
11.襟翼控制计算机,所述襟翼控制计算机设置在设备舱,用于根据所述第一角度以及所述第二角度实现对所述襟翼动力驱动装置的控制。
12.在本技术的至少一个实施例中,所述襟翼作动线系包括第一变角减速器、第二变角减速器以及收放制动装置,多个所述第一变角减速器依次串联设置在所述襟翼上,所述第二变角减速器与所述襟翼动力驱动装置的输出轴连接,相邻所述第一变角减速器以及所述第二变角减速器之间通过扭力杆以及支架连接,所述收放制动装置设置在所述扭力杆上,且靠近所述襟翼的翼尖位置。
13.在本技术的至少一个实施例中,所述第一变角减速器为下吊式变角减速器。
14.在本技术的至少一个实施例中,所述襟翼全行程运动20
°
,所述襟翼作动线系转过的圈数为106圈。
15.在本技术的至少一个实施例中,所述襟翼位置传感器包括左襟翼位置传感器以及右襟翼位置传感器,所述左襟翼位置传感器设置在左襟翼翼尖上,所述右襟翼位置传感器设置在右襟翼翼尖上。
16.在本技术的至少一个实施例中,所述襟翼位置传感器为正余弦传感器,所述齿轮减速机构的减速比为125,用于将襟翼全行程运动的圈数减小到360
°
以内。
17.在本技术的至少一个实施例中,所述输出轴位置传感器为正余弦传感器,所述输出轴位置传感器全行程转过的角度为38160
°
。
18.在本技术的至少一个实施例中,所述左襟翼位置传感器、所述右襟翼位置传感器、所述输出轴位置传感器以及所述襟翼控制计算机均采用双余度设计。
19.本技术的第二个方面提供了一种襟翼极限位置保护方法,基于如上所述的襟翼极限位置保护系统,包括:
20.步骤一、系统上电后,襟翼控制计算机根据襟翼位置传感器的第一角度计算襟翼位置表决值,并通过所述襟翼位置表决值计算当前襟翼位置相对输出轴所转过的角度,得到输出轴角度初始值;
21.步骤二、系统进入实时任务后,襟翼控制计算机实时检测输出轴位置传感器的第二角度变化,在所述输出轴角度初始值的基础上增加或减小相应的角度变化量,得到输出轴实时角度;
22.步骤三、当襟翼控制计算机计算的输出轴实时角度达到预设的门限值,且当前襟翼位置传感器的第一角度达到保护范围内时,开启极限位置保护模式,停止向襟翼动力驱动装置输出控制指令。
23.在本技术的至少一个实施例中,所述极限位置保护模式包括收起极限位置保护模式以及放下极限位置保护模式,其中,在收起极限位置保护模式下,所述襟翼动力驱动装置能够响应放下控制指令,在放下极限位置保护模式下,所述襟翼动力驱动装置能够响应收起控制指令。
24.发明至少存在以下有益技术效果:
25.本技术的襟翼极限位置保护系统,实现襟翼极限位置监控与保护,在襟翼控制功能失效时实现运动行程保护,安全可靠,避免出现误保护而影响功能实现。
附图说明
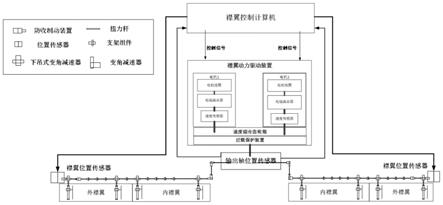
26.图1是本技术一个实施方式的襟翼极限位置保护系统示意图。
具体实施方式
27.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本技术一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用
于解释本技术,而不能理解为对本技术的限制。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。下面结合附图对本技术的实施例进行详细说明。
28.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制。
29.下面结合附图1对本技术做进一步详细说明。
30.本技术的第一个方面提供了一种襟翼极限位置保护系统,包括:襟翼动力驱动装置、襟翼位置传感器、输出轴位置传感器以及襟翼控制计算机。
31.具体的,襟翼动力驱动装置通过襟翼作动线系与襟翼连接,通过驱动襟翼作动线系,从而带动襟翼舵面按预设的轨迹偏转。襟翼位置传感器安装于襟翼作动线系的末端,即襟翼的翼尖上,用于获取襟翼的第一角度,襟翼位置传感器配置有齿轮减速机构;输出轴位置传感器安装于襟翼作动线系的根部,即襟翼动力驱动装置的输出轴上,用于获取襟翼动力驱动装置的输出轴的第二角度;襟翼控制计算机设置在设备舱,用于根据第一角度以及第二角度实现对襟翼动力驱动装置的控制。襟翼位置传感器用于实现位置控制闭环反馈,输出轴位置传感器用于实现监控与保护,襟翼控制计算机通过电缆激磁并解调交联的传感器,能够实现初始位置计算、实时位置计算以及故障监控保护等环节。
32.在本技术的一个实施方式中,参见图1,襟翼作动线系包括第一变角减速器、第二变角减速器以及收放制动装置,多个第一变角减速器依次串联设置在襟翼上,第二变角减速器与襟翼动力驱动装置的输出轴连接,相邻第一变角减速器以及第二变角减速器之间通过扭力杆以及支架连接,收放制动装置设置在扭力杆上,且靠近襟翼的翼尖位置。本实施例中,第一变角减速器为下吊式变角减速器。
33.本技术的襟翼极限位置保护系统,襟翼全行程运动20
°
,所述襟翼作动线系转过的圈数为106圈。襟翼位置传感器包括左襟翼位置传感器以及右襟翼位置传感器,左襟翼位置传感器设置在左襟翼翼尖上,右襟翼位置传感器设置在右襟翼翼尖上。襟翼位置传感器为正余弦传感器,自身带有齿轮减速机构,齿轮减速机构的减速比为125,可将襟翼全行程运动的圈数减小到360
°
以内。襟翼作动线系左右翼尖各安装一个,每个内部均为电气两余度。本实施例中,输出轴位置传感器为正余弦传感器,自身不带有齿轮减速机构,输出轴位置传感器全行程转过的角度为38160
°
,每个内部均为电气两余度。进一步,本实施例中,襟翼控制计算机为两台,是系统的控制与监控核心,完成相关信号的解调与功能实现,每台计算机解算1余度左襟翼位置传感器、右襟翼位置传感器、输出轴位置传感器的信号,两台计算机同时工作,实现系统运动控制功能。左襟翼位置传感器、右襟翼位置传感器、输出轴位置传感器以及襟翼控制计算机均采用双余度设计,防止单个传感器故障导致系统无法正常工作。
34.基于上述的襟翼极限位置保护系统,本技术的第二个方面提供了一种襟翼极限位置保护方法,包括:
35.步骤一、系统上电后,襟翼控制计算机根据襟翼位置传感器的第一角度计算襟翼
位置表决值,并通过襟翼位置表决值计算当前襟翼位置相对输出轴所转过的角度,得到输出轴角度初始值;
36.步骤二、系统进入实时任务后,襟翼控制计算机实时检测输出轴位置传感器的第二角度变化,在输出轴角度初始值的基础上增加或减小相应的角度变化量,得到输出轴实时角度;
37.步骤三、当襟翼控制计算机计算的输出轴实时角度达到预设的门限值,且当前襟翼位置传感器的第一角度达到保护范围内时,开启极限位置保护模式,停止向襟翼动力驱动装置输出控制指令。
38.步骤三中,极限位置保护模式包括收起极限位置保护模式以及放下极限位置保护模式,其中,在收起极限位置保护模式下,襟翼动力驱动装置能够响应放下控制指令,在放下极限位置保护模式下,襟翼动力驱动装置能够响应收起控制指令。
39.本技术的襟翼极限位置保护方法,在系统上电后,每台襟翼控制计算机根据左右襟翼位置传感器的角度,计算出襟翼位置表决值,再通过襟翼位置表决值分别计算当前襟翼位置对应输出轴所转过的角度,得到输出轴角度初始值。假设襟翼位置此时在0
°
,则换算得到的输出轴角度也为0
°
。系统进入实时任务后,每台襟翼控制计算机实时检测输出轴位置传感器的角度变化,在输出轴角度初始值的基础上增加或减小相应的角度变化量。例如,输出轴每放下1
°
,输出轴角度增加1,输出轴每收起1
°
,输出轴角度减小1。当某台襟翼控制计算机计算的输出轴角度达到系统设定的门限值,并且当前襟翼位置传感器计算的角度信号也达到保护范围内时,当前余度进行极限位置保护,停止控制指令输出,即正常控制收起位置为0
°
,放下位置为20
°
,则极限保护门限设置为-0.2
°
和20.2
°
,换算为输出轴角度分别为-381.6
°
和38541.6
°
,设置襟翼位置小于2
°
时具备收起极限位置保护功能,襟翼位置大于18
°
时具备放下极限位置保护功能,则当襟翼位置小于2
°
且输出轴角度小于-381.6
°
时,进行收起极限位置保护,当襟翼位置大于18
°
且输出轴角度大于38541.6
°
时,进行放下极限位置保护。当出现收起极限位置保护时,仍可响应放下指令,当出现放下极限位置保护时,仍可响应收起指令。当出现系统单余度极限位置保护时,另一余度的系统仍可控制舵面进行运动。
40.本技术的襟翼极限位置保护系统及方法,适用于小型涡桨运输飞机,能够实现襟翼极限位置监控与保护,在襟翼控制功能失效时实现运动行程保护,基于双余度设计,安全可靠,避免出现误保护而影响功能实现。本技术逻辑清晰、方法创新,安全可靠、位置保护精度高,并经过实际应用,具有很高的专业应用和推广价值。
41.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1