一种尾部涵道推力电动垂直起降复合翼飞行器的制作方法
1.本发明涉及航空技术领域,具体涉及一种尾部涵道推力电动垂直起降复合翼飞行器。
背景技术:
2.随着城市化进程,陆用空间日趋饱和,交通拥堵问题日益严重,亟需开发城市空中可用空间,发展垂直式立体交通。evtol(electric vertical takeoffand landing)电动垂直起降飞行器开发吸引了包括航空航天企业、汽车行业、运输行业、政府、军方以及学术界的广泛关注。evtol未来潜在应用涉及城市客运、区域客运、货运、个人飞行器、紧急医疗服务等多种场景模式。
3.evtol的垂直升降,一般是通过提供垂直升力的多旋翼实现。多旋翼具有垂直起降和悬停等功能,对地形依赖性不高,具有较好的灵活性,但其最大前飞速度受到诸多限制;如果飞行器仅靠垂直螺旋桨提供升力和推力,效率较低;固定翼飞机具有较高的前飞速度,但对地形要求很高,场地建设和维护成本较高,因此结合多旋翼和固定翼的优点,打造一款气动性能好、地形适应性强、飞行速度快、适合城市交通的垂直起降飞行器成为研究热点。
4.多旋翼用于起降及固定翼用于巡航阶段这种复合翼布局是目前电动垂直起降采用较多的方式。为提高垂起飞行器的安全及巡航性能,旋翼数量增加,且在重心前后对称分布,可有效降低控制复杂性,然而尾部的推桨机构布置也较为困难;为了克服巡航阻力及确保一定的机动性,通常尾推螺旋桨尺寸较大,这也给巡航的经济性及尾翼的载荷带来挑战,同时尾推桨在地面工作时安全性要求较高。
5.本文为解决现有技术中存在的不足,结合涵道及固定翼等技术,提出了一种尾部涵道推力电动垂直起降飞行器。
技术实现要素:
6.本发明的目的在于提供一种尾部涵道推力电动垂直起降复合翼飞行器,以解决背景技术中提到的问题。为实现上述目的,本发明提供如下技术方案:一种尾部涵道推力电动垂直起降复合翼飞行器,包括机身,所述机身的两侧安装有机翼,底部安装有起落架,所述机翼的端部连接低阻翼尖,所述机翼上安装有外侧电机臂,所述外侧电机臂上安装有升力螺旋桨,所述机身的尾部连接内v尾,所述内v尾连接内侧电机臂,所述内侧电机臂前端连接外侧电机臂,后端连接尾推涵道推力桨,所述外侧电机臂外侧连接外v尾。
7.优选地,所述尾推涵道推力桨包括定子,所述定子的中心点连接内侧电机臂后端,所述定子的外端连接涵道的内壁,所述定子的后侧设有推力桨,所述推力桨连接内侧电机臂的输出端,所述推力桨位于涵道内侧。
8.优选地,所述推力桨的后侧设有整流罩,所述整流罩安装于内侧电机臂的输出端上。
9.优选地,所述机翼的后侧安装有副翼和襟翼。
10.优选地,每个所述机翼上均安装有多组外侧电机臂,并列分布,最内侧的外侧电机臂后端连接内侧电机臂。
11.本发明的技术效果和优点:本飞行器兼备直升机和固定翼飞机的优点,具备较好的地形适应性和巡航性能。该飞行器无需跑道即可进行垂直起降,可以适应复杂的城市交通环境,安全性和适应性较强;飞行器在气动方面具有优异的性能,尾推涵道推力桨较高的推重比使得结构紧凑及巡航阻力较小,同时涵道的存在增加了推力桨地面工作的安全性,同时具有较低的噪音特性;飞行器易于操纵,多旋翼(升力螺旋桨)和固定翼之间的模式转换可以通过多旋翼及涵道推力桨配合进行操纵,两种模式下的操纵易于转换,操纵效率高。
附图说明
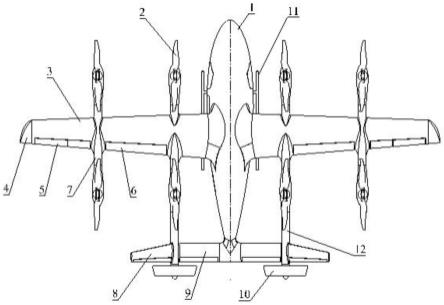
12.图1为本发明的俯视图;
13.图2为本发明的侧视图;
14.图3为本发明的前视图;
15.图4为本发明的尾推涵道推力桨安装示意图。
16.图中:1-机身,2-升力螺旋桨,3-机翼,4-低阻翼尖,5-副翼,6-襟翼,7-外侧电机臂,8-外v尾,9-内v尾,10-尾推涵道推力桨,11-起落架,12-内侧电机臂,101-涵道,102-推力桨,103-定子,104-整流罩。
具体实施方式
17.为了使本发明的实现技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明,在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接或是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以两个元件内部的连通。
18.实施例
19.如图1所示为尾部涵道推力电动垂直起降复合翼飞行器示意图,包括机身1,机身1的两侧安装有机翼3,底部安装有起落架11,机翼3的翼梢连接低阻翼尖4,机翼3上并列安装有两个外侧电机臂7,外侧电机臂7上安装有升力螺旋桨2,机身1的尾部连接内v尾9,内v尾9连接内侧电机臂12,内侧电机臂12前端连接内侧外侧电机臂7,后端连接尾推涵道推力桨10,外侧电机臂7外侧连接外v尾8。动力布局为若干螺旋桨实现垂直起降,尾部涵道螺旋桨实现前飞及转换。机翼3的后侧安装有副翼5和襟翼6,其中襟翼6用于起降及转换阶段,副翼5用于固定翼滚转操纵;尾翼采用双v尾布局,起落架11采用滑橇式。
20.在垂直起降阶段,襟翼6以某一偏度放下,升力螺旋桨2对称分布在机身1两侧,调整各升力螺旋桨2使得螺旋桨合力的中心与重心重合实现垂直起降功能;飞机的纵向俯仰控制是通过增加(减小)前面一排同时降低(增加)后面一排升力螺旋桨2的转速实现;增加(减小)左侧同时降低(增加)右侧升力螺旋桨2的转速可以实现飞机的横滚控制;升力螺旋桨2的旋转方向相邻相反,增加(减小)顺时针旋转一组升力螺旋桨2的转速可实现逆时针(顺时针)偏航控制。
21.垂直爬升到一高度后进入转换时,尾推涵道推力桨10加速飞机前飞,同时升力螺
旋桨2的转速降低以确保平飞姿态,控制其转速不至于掉高度,待达到转换完成的速度,升力螺旋桨2停止工作,飞机进入固定翼工作模式。
22.当速度达到固定翼控制介入控制所需的最低速度后,固定翼舵面开始工作,副翼5用来控制飞机横滚,外v尾8舵面主要用来控制飞机偏航,内v尾9舵面主要用来控制飞机俯仰,襟翼6下偏可增加飞机的升力,减小固定翼/升力螺旋桨模式转换速度。
23.尾推涵道推力桨10安装在内侧电机臂12后部。推力轴线与电机臂轴线共轴,如图2~3所示。如图4所示,尾推涵道推力桨10包括定子103,定子103的中心点连接内侧电机臂12后端,定子103的外端连接涵道101的内壁,定子103的后侧设有推力桨102,推力桨102连接内侧电机臂12的输出端,推力桨102位于涵道101内侧,推力桨102的后侧设有整流罩104,整流罩104安装于内侧电机臂12的输出端上。推力桨102高速旋转推动气流从机头向尾部方向流动,气流在下游定子103的整流作用下减弱旋转,可以更好工作。整流罩104使得经过定子103后的气流与外部气流更好的融合,消除中心回流区,减阻降噪。
24.推力桨102与涵道101之间的间隙对于尾推涵道推力桨10的整体性能影响较大,间隙过大导致涵道101性能下降,过小时结构振动易于导致推力桨102桨叶损坏涵道101。
25.轴向高速气流在流过涵道101前缘唇口时产生较低的负压区,从而产生较大的向前拉力,故唇口处的流动状态对涵道101的设计至关重要,通常要保证在设计包线范围内唇口处的气流都保持流动附着状态,对于低速飞行状态(来流ma~0.2),唇口半径较大低速特性好。
26.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1