一种拓展性好的安防无人机及其安防系统的制作方法
1.本发明涉及安防系统领域,具体的是一种拓展性好的安防无人机及其安防系统。
背景技术:
2.安防系统是一种通过监控设备的联动式操作完成对某固定区域内进行巡逻、监察的系统,而现有的安防系统大多将多个摄像头矩阵式排布设置,通过监控范围的覆盖来完成对一个固定区域的监察,但该种安防系统中的摄像头监控范围固定,在两个相邻的监控器所监控的范围间容易出现较多的死角,如被物体所遮掩的区域四角、两个监控器所监控的区域的衔接处死角或监控器下方的死角等等,便并不能够提供良好的监控效果。
技术实现要素:
3.本发明提供了一种拓展性好的安防无人机及其安防系统,其克服了背景技术中所描述的不足。
4.本发明解决其技术问题的所采用的技术方案是:一种拓展性好的安防无人机,包括无人机本体,所述包括无人机躯干、支撑杆、电机、安装板、蓄电池、无线充电器、电量监测器、红外距离感应器、支撑板,所述支撑杆环设于无人机躯干的侧面,每个所述支撑杆的末端均设有一电机,各个所述电机的输出轴上均装设有一叶片,所述安装板分别设于无人机躯干的左右两侧,每个所述安装板下端均设有一监控器,所述电量监测器以及红外距离感应器均设于无人机躯干的侧面,所述支撑板的两侧分别通过一固定板连接于无人机躯干的下端,所述蓄电池以及无线充电器均装设于支撑板靠近无人机躯干的一端,所述无线充电器、电量监测器、红外距离感应器均与蓄电池相电连,各个所述电机均与蓄电池相电连;所述安装板分别位于红外距离感应器的左右两侧;所述无人机躯干内设有用于定位的定位器。
5.一较佳技术方案:所述支撑板下端面突出于监控器的下端面。
6.一较佳技术方案:还包括充电底座,所述充电底座包括无线充电线圈组、支撑环,所述支撑环套设在无线充电线圈组外,所述支撑环的内径大于两个所述安装板末端之间的长度。
7.一较佳技术方案:所述支撑环内活动设有一伸缩环,所述支撑环内具有一用于伸缩环伸缩的活动间距,所述弹簧设于活动间距内。
8.一种拓展性好的安防无人机的安防系统:所述安防系统包括多个无人机本体、多个充电底座以及控制系统a和监控系统b,所述控制系统a包括无人机控制模块a、电量监控模块a、无线充电模块a、处理中心a,所述无人机控制模块a、电量监控模块a、无线充电模块a均信号连接着所述处理中心a,所述电量监控模块a信还号连接着电量监测器,所述无线充电模块a还分别信号连接着定位器、电量监测器以及无线充电线圈组;所述充电底座的数量多于无人机本体的数量。
9.一较佳技术方案:所述无人机控制模块a包括无人机控制器a,所述无人机控制器a
信号连接着所有无人机本体以及处理中心a。
10.一较佳技术方案:所述无人机控制器a具有用于调整无人机本体飞行路径以及监控范围的路径规划模块a以及在无人机本体飞行中规避障碍物的避障模块a,所述避障模块a信号连接着红外距离感应器。
11.一较佳技术方案:所述监控系统b包括监控模块b以及监控器b,各个所述无人机本体上的监控器具有一监控模块b,各个所述监控模块b均信号连接着监控器b,以通过监控器将监控的画面通过监控模块b传输至监控器b上。
12.本技术方案与背景技术相比,它具有如下优点:本发明可通过多个无人机本体匹配安防系统对需要监控的范围以及路径进行规划,通过所有监控器同时对区域进行监控,可通过路径规划模块以及避障模块保证无人机本体在飞行中路径的准确性,以及通过多个无人机本体对监控范围形成覆盖,避免出现如背景技术中死角的问题,并且在某个无人机本体电量低于阈值时,便可通过无人机控制器、电量监控模块、无线充电模块的相互配合将低于电量阈值的无人机本体停靠于充电底座上进行充电,同时在充电时预备使用的无人机本体补充原有监控位置,保证无人机本体监控工作的进行。
附图说明
13.下面结合附图和实施例对本发明作进一步说明。
14.图1-2为本发明的整体结构示意图。
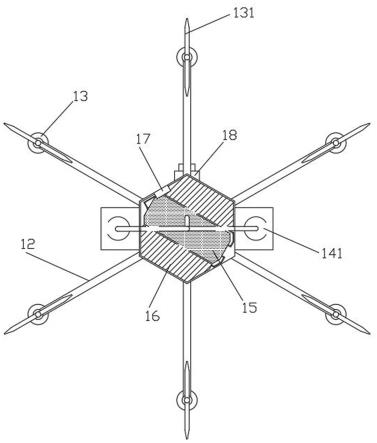
15.图3为无人机本体1的示意图。
16.图4为图3的俯视图。
17.图5为充电底座2的截面示意图。
18.图6为控制系统的示意图。
19.图7为无人机控制模块a1的示意图。
20.图中:无人机本体1、无人机躯干11、支撑杆12、电机13、叶片131、安装板14、监控器141、蓄电池15、无线充电器16、电量监测器17、红外距离感应器18、支撑板19、充电底座2、无线充电线圈组21、支撑环22、伸缩环221、弹簧222、控制系统a、无人机控制模块a1、无人机控制器a11、路径规划模块a111、避障模块a112、电量监控模块a2、无线充电模块a3、处理中心a4、监控系统b、监控模块b1、监控器b2。
具体实施方式
21.实施例一如图1-5所示,一种拓展性好的安防无人机,包括无人机本体1,所述包括无人机躯干11、支撑杆12、电机13、安装板14、蓄电池15、无线充电器16、电量监测器17、红外距离感应器18、支撑板19,所述支撑杆12环设于无人机躯干11的侧面,每个所述支撑杆12的末端均设有一电机13,各个所述电机13的输出轴上均装设有一叶片131,所述安装板14分别设于无人机躯干11的左右两侧,每个所述安装板14下端均设有一监控器141,所述电量监测器17以及红外距离感应器18均设于无人机躯干11的侧面,所述支撑板19的两侧分别通过一固定板连接于无人机躯干11的下端,所述蓄电池15以及无线充电器16均装设于支撑板19靠近无人机
躯干11的一端,所述无线充电器16、电量监测器17、红外距离感应器18均与蓄电池15相电连,各个所述电机13均与蓄电池15相电连;所述安装板14分别位于红外距离感应器18的左右两侧;所述无人机躯干11内设有用于定位的定位器;并且,本发明中还包括充电底座2,所述充电底座2包括无线充电线圈组21、支撑环22,所述支撑环22套设在无线充电线圈组21外,所述支撑环22的内径大于两个所述安装板14末端之间的长度,同时本发明中还设有用于控制无人机本体1的无人机控制器a11以及将监控的画面进行传输以及显示的监控器b2,因此在利用本发明进行区域性飞行监控时,便可通过无人机控制器a11控制无人机本体1在空中飞行,同时通过安装在安装板14下方的监控器141对无人机本体1飞行过的区域进行监控,同时由于本发明中还配备有一充电底座2,并且充电底座2中的无线充电线圈组21与无人机本体1内的无线充电器16电磁感应连接,因此当蓄电池15中所储存的电量无法持续供给无人机本体1进行飞行以及监控器141的监控工作时,便可通过b11控制无人机本体1飞行至充电底座2上,使支撑板19与无线充电线圈组21的表面相贴合,通过无线充电器16与无线充电线圈组21之间的电磁感应来进行充电,使蓄电池15内的电量饱和,由于所述支撑板19下端面突出于监控器141的下端面,因此当将无人机本体1停于无线充电线圈组21的表面时监控器141是不会与无线充电线圈组21的表面相抵,也能够有效的减少监控器141表面被刮花的情况;由所述支撑环22内活动设有一伸缩环221,所述支撑环22内具有一用于伸缩环221伸缩的活动间距,所述弹簧222设于活动间距内,而伸缩环221通过多个弹簧222进行支撑,并且在弹簧222松弛时伸缩环221的端面是高于支撑杆12的下端面,可以理解为当将无人机本体1停靠在充电底座2上时,支撑杆12是会向内挤压支撑杆12的,通过伸缩环221来分担无人机本体1的重力;并且在将无人机本体1停靠于无线充电线圈组21上时,可通过无线充电线圈组21内的电磁线圈与无线充电器16相反应,并且利用无线充电线圈组21的功能进行充电,将电量汇集至蓄电池15内进行储存;而本实施例中有必要解释的是,通过无人机控制器a11控制无人机本体1进行飞行以及通过监控器b2将监控的画面进行传输以及显示的技术方案均是属于本领域技术人员所悉知的公知技术,因此便不对其作进一步赘述,并且在通过无人机控制器a11控制无人机本体1飞行时所参照的飞行参数均可采用现有技术中无人机的操作方式。
22.实施例二如图6-7所示,本实施例中提供了一种拓展性好的安防无人机的安防系统,所述安防系统包括多个无人机本体1、多个充电底座2以及控制系统a和监控系统b,所述控制系统a包括无人机控制模块a1、电量监控模块a2、无线充电模块a3、处理中心a4,所述无人机控制模块a1、电量监控模块a2、无线充电模块a3均信号连接着所述处理中心a4,所述电量监控模块a2信还号连接着电量监测器17,所述无线充电模块a3还分别信号连接着定位器、电量监测器17以及无线充电线圈组21;所述充电底座2的数量多于无人机本体1的数量;当实施例一中的设备搭载本实施例中的安防系统进行工作时使用者可通过无人机控制器a11人为规划出一部分监控区域,而该监控区域也可以理解为控制无人机自动飞行的移动路径,当无人机飞行过程中通过监控器141所照射监控的范围皆可理解为监控区域;同时有必要解释的是,当利用多个无人机本体1进行区域监控时,需要配备至少一
台无人机本体1作为预备使用的设备,当其中某个无人机本体1因电量低需要进行充电或更换时,可通过预备的无人机本体1替代原有设备进行区域监控工作;由于所述无人机控制器a11具有用于调整无人机本体1飞行路径以及监控范围的路径规划模块a111以及在无人机本体1飞行中规避障碍物的避障模块a112,所述避障模块a112信号连接着红外距离感应器18,因此在使用本安防系统时,可将多个无人机本体1以及充电底座2均匀分布于所述监控范围内,通过无人机控制器a11控制所有无人机本体1沿着原本规划的飞行路径进行飞行,同时通过所有的无人机本体1上的监控器141对下方的区域进行监控,而由于所述监控系统b包括监控模块b1以及监控器b2,各个所述无人机本体1上的监控器141具有一监控模块b1,各个所述监控模块b1均信号连接着监控器b2,因此便可同时将监控的画面通过监控模块b1传输至监控器b2上进行显示;而由于控制系统a中设有电量监控模块a2以及无线充电模块a3,因此便可通过电量监控模块a2监控蓄电池15的剩余点电量,并且可在电量监控模块a2以及无线充电模块a3内同时设定无人机本体1飞行中剩余电量的阈值,当低于该阈值时,便可通过无人机控制模块a1朝被监控模块b1监控的剩余电量低于阈值的无人机本体1飞向充电底座2,通过无线充电线圈组21进行充电;以下对本实施例的具体实施方案进行逐步介绍:首先通过无人机控制器a11内的路径规划模块a111对无人机本体1需要飞行的路径及监控区域进行规划,如当对方形区域进行监控时,便可规划无人机本体1沿方形区域的边沿或中间部进行飞行,通过相邻间的无人机本体1上监控器141监控范围的覆盖后重叠形成对目标区域的监控,而设置多台无人机本体1来进行监控的目的便是为了如背景技术中所述的
‘
死角’问题,并且当某一个无人机本体1因电量低或恶意破坏时,其余的无人机本体1也可持续对监控范围进行监控,并不会出现监控死角,因为单独的无人机本体1的监控区域是随着单独的无人机本体1的飞行而进行持续改变的;其次,当多个无人机本体1飞行中某个无人机本体1的电量低于阈值时,可先通过电量监控模块a2对蓄电池15的电量进行持续监控,同时通过无线充电模块a3反馈某个不在充电的充电底座2,再将该信息同时传输至低于电量阈值的无人机本体1以及无人机控制器a11上,再通过无人机控制器a11控制低于电量阈值的无人机本体1飞行至不在充电的充电底座2上,通过无线充电器16与无线充电线圈组21的反应对无人机本体1上的蓄电池15进行充电,再通过蓄电池15对电机13、电量监测器17、红外距离感应器18等设备进行供电,而如若具有多个不在充电中的充电底座2,无人机控制器a11可通过无人机躯干11内设置的定位器定位低于电量阈值的无人机本体1的位置,控制该无人机本体1飞往距其最近的充电底座2上进行充电,而有必要解释的是,在控制无人机本体1飞往距其最近的充电底座2的路径规划前,可安装充电底座2时,事先在无人机控制器a11内上传各个充电底座2的所在位置,以至于在低于电量阈值的无人机本体1飞行至距其较近的充电底座2进行充电时,可通过无人机本体1上的定位器与上传的充电底座2的位置进行匹配;而当某个无人机本体1停靠在充电底座2上充电时,处理中心a4便会控制未飞行的无人机本体1工作,替代电量低于阈值的无人机本体1的原有飞行轨迹。
23.再者,通过无人机控制器a11控制或规划无人机本体1的监控路径时并无法保证在无人机本体1飞行时不会被建筑物或植被所遮挡,因此在无人机本体1上设置了红外距离感
应器18无人机控制器a11内设置了避障模块a112,并且以红外距离感应器18的方向为飞行主方向及以红外距离感应器18的方向为无人机本体1飞行的前进方向,因此在无人机本体1被无人机控制器a11控制执行区域监控而飞行途中遇到障碍物时,可优先被设于前方的红外距离感应器18所感应,再将信号发送至无人机控制器a11内的避障模块a112中,同时控制悬停无人机本体1控制无人机本体1平面顺时针自转四十五度再次前进,如若再次被红外距离感应器18所感应便再次悬停后顺时针自转四十五度再次前进,直至无人机本体1飞过建筑或障碍物。
24.而有必要解释的是,为了避免在无人机本体1跨越障碍物时飞跃出监控范围外,无人机本体1在每次悬停顺时针转动时均会重新通过路径规划模块a111重新规划路径,并且该规划路径均在监控范围内,同时为了更够更加便捷的控制无人机本体1在监控范围内飞行,可将无人机本体1在遇到障碍物时而进行的自转变更为朝向监控范内的其余无人机本体1的飞行方向的相同方向。
25.以上所述,仅为本发明较佳实施例而已,故不能依此限定本发明实 施的范围,即依本发明专利范围及说明书内容所作的等效变化与修饰,皆应仍属本发明涵盖的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1