航天器机构地面展开零重力模拟方法和系统与流程
本发明一般涉及航天器装配测试,具体涉及一种航天器机构地面展开零重力模拟方法和系统。
背景技术:
1、随着通信、遥感和导航卫星技术的发展,空间可展开结构技术作为解决大尺寸航天器结构与火箭发射包络限制之间矛盾的主要手段,已经越来越多地应用在空间卫星技术中,例如可以包括:空间大型网状天线、空间太阳翼、深度探测可展开结构等。航天器结构最初以较小体积的折叠状态安装在载体上,在轨时通过地面的指令控制展开到工作状态。为了保证航天器结构的顺利展开,在航天器地面研制阶段,需要开展机构展开实验,并且为了保证地面实验的有效性,在实验过程中需要采取措施卸载机构活动部件的重力,以模拟在轨的零重力环境显得尤为重要。
2、目前,现有技术中的航天器机构零重力模拟方法可以采用悬吊法、气浮法等,然而该悬吊法、气浮法等空间机构展开的零重力模拟方法需要搭建大型的实验设施,导致其占用空间大,且搭建调试耗时也较长。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,期望提供一种航天器机构地面展开零重力模拟方法、装置、设备及介质,能够通过控制托举力平衡部件的重力,实现对部件的零重力模拟,极大地缩短了时间,适用于航天器研制空间有限、进度紧张的情况,应用灵活且便捷。
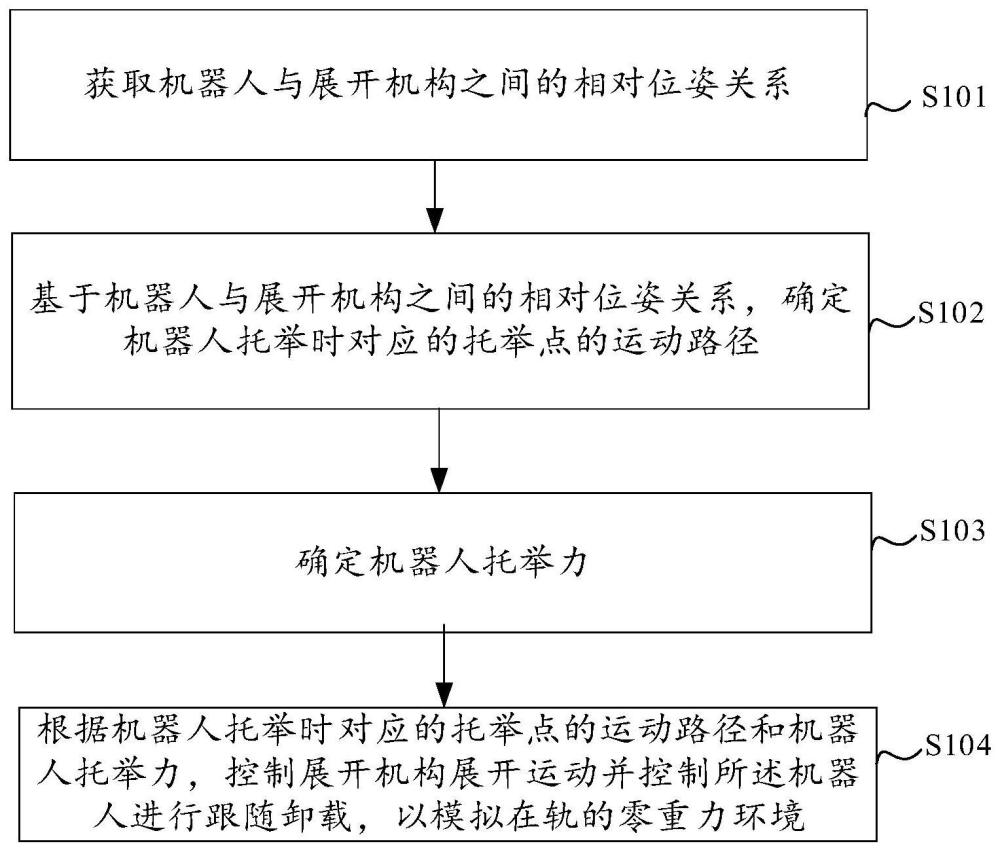
2、第一方面,本发明提供了一种航天器机构地面展开零重力模拟方法,该方法包括:
3、获取机器人与展开机构之间的相对位姿关系;
4、基于所述机器人与所述展开机构之间的相对位姿关系,确定所述机器人托举时对应的托举点的运动路径;
5、确定所述机器人托举力;
6、根据所述机器人托举时对应的托举点的运动路径和所述机器人托举力,控制所述展开机构展开运动并控制所述机器人进行跟随卸载,以模拟在轨的零重力环境。
7、在其中一个实施例中,所述相对位姿关系包括所述展开机构的转轴中心位置和所述展开机构的转轴空间方向,获取机器人与展开机构之间的相对位姿关系,包括:
8、获取所述机器人工具坐标系原点位置;
9、基于所述机器人工具坐标系原点位置,确定所述展开机构的转轴中心在所述机器人基坐标系中的转轴中心位置;
10、确定所述机器人的托举点位置与所述展开机构的转轴空间方向。
11、在其中一个实施例中,基于所述机器人工具坐标系原点位置,确定所述展开机构的转轴中心在所述机器人基坐标系中的转轴中心位置,包括:
12、将所述机器人工具坐标系原点移动至所述展开机构转轴中心接近的位置;
13、测量所述机器人工具坐标系原点与所述展开机构中转轴中心在所述机器人基坐标系各轴方向上的偏移量;
14、基于所述偏移量和所述机器人工具坐标系原点位置,得到所述展开机构的转轴中心在所述机器人基坐标系中的转轴中心位置。
15、在其中一个实施例中,确定所述机器人的托举点位置与所述展开机构的转轴空间方向,包括:
16、将所述机器人末端的托举装置与所述展开机构对接、固定;
17、获取所述机器人工具坐标系姿态信息;
18、将所述机器人工具坐标系原点位置作为所述机器人的托举点位置;
19、基于所述机器人工具坐标系姿态信息确定所述展开机构的转轴空间方向。
20、在其中一个实施例中,所述运动路径包括运动的半径、圆心、转轴空间方向、运动起始位置、运动弧长和运动速度;基于所述机器人与所述开展机构的相对位姿关系,确定所述机器人托举时对应的托举点的运动路径,包括:
21、基于所述展开机构的转轴中心在所述机器人基坐标系中的位置和所述机器人的托举点位置,计算所述机器人末端托举点的运动路径对应的圆弧半径;
22、确定所述展开机构的展开角度和展开角速度;
23、将所述圆弧半径作为所述运动路径的半径,将所述展开机构的转轴中心位置作为所述运动路径的圆心,并将所述展开机构的转轴空间方向作为所述运动路径的转轴空间方向;
24、获取所述托举点的初始托举位置;
25、基于所述托举点的初始托举位置、所述圆弧半径、所述展开角度和所述展开角速度,确定运动路径的运动起始位置、运动弧长和运动速度。
26、在其中一个实施例中,基于所述托举点的初始托举位置、所述圆弧半径、所述展开角度和所述展开角速度,确定运动路径的运动起始位置、运动弧长和运动速度,包括:
27、将所述托举点的初始托举位置确定为运动路径的运动起始位置;
28、基于所述圆弧半径和所述展开机构的展开角度,确定运动路径的运动弧长;
29、基于所述圆弧半径和所述展开机构的展开角速度,确定运动路径的运动速度。
30、在其中一个实施例中,确定所述机器人托举力,包括:
31、获取机器人托举点位置、所述展开机构的活动部件重力、所述活动部件的重心位置;
32、当所述机器人托举点位置与所述活动部件的重心位置重合时,所述托举力为所述活动部件重力;
33、当所述机器人托举点位置与所述活动部件的重心位置不重合时,根据所述机器人托举点位置、所述活动部件的重心位置和所述活动部件重力大小,计算所述托举力。
34、在其中一个实施例中,根据所述机器人托举时对应的托举点的运动路径和所述机器人托举力,控制所述展开机构展开运动并控制所述机器人进行跟随卸载,包括:
35、在所述展开机构初始位置,控制机器人运动,使得位于所述机器人末端的托举装置与所述展开机构的活动部件对接;
36、根据所述托举力,控制所述托举装置对所述展开机构的活动部件的力度;
37、根据所述机器人托举点的运动路径和所述机器人托举力,控制所述展开机构执行展开运动,并控制所述机器人按照所述运动路径运动,对所述机器人的运动位置、运动速度进行调整,以使所述托举装置在竖直方向的力为所述托举力。
38、在其中一个实施例中,控制所述展开机构执行展开运动,包括:
39、判断所述力传感器数据是否发生突变,得到突变结果;
40、根据所述突变结果,判断所述展开机构执行展开运动的开始与停止。
41、第二方面,本技术实施例提供了航天器机构地面展开零重力模拟系统,该系统包括:机器人、托举装置、展开机构和计算机控制装置,所述托举装置安装在所述机器人末端,所述托举装置与所述展开机构配合连接;所述托举装置具有托举点;所述计算机控制装置与所述机器人电连接;
42、所述托举装置具有托举点,所述托举点处设置有力传感器,所述展开机构包括转轴和活动部件;
43、所述计算机控制装置用于获取所述机器人与所述展开机构之间的相对位姿关系,并基于所述机器人与所述开展机构之间的相对位姿关系,确定所述机器人托举时对应的托举点的运动路径,然后确定所述机器人托举力,并根据所述机器人托举时对应的托举点的运动路径和所述机器人托举力,控制所述展开机构展开运动并控制所述机器人进行跟随卸载,以模拟在轨的零重力环境。
44、本技术实施例提供的航天器机构地面展开零重力模拟方法和系统,通过获取机器人与展开机构之间的相对位姿关系,并基于机器人与展开机构之间的相对位姿关系,确定机器人托举时对应的托举点的运动路径,然后确定机器人托举力,根据机器人托举时对应的托举点的运动路径和机器人托举力,控制展开机构展开运动并控制机器人进行跟随卸载,以模拟在轨的零重力环境。与现有技术相比,该技术方案中的机器人占地面积小,应用灵活便捷,并且计算机控制装置能够根据获取的机器人与展开机构之间的相对位姿关系,精准地确定出托举点的运动路径和托举力,以根据运动路径和托举力,有针对性地控制机器人进行跟随卸载,便于通过机器人对开展开机构的活动部件向上进行托举,并通过控制托举力平衡部件的重力,实现对部件的零重力模拟,极大地缩短了时间,适用于航天器研制空间有限、进度紧张的情况,应用灵活且便捷。
- 还没有人留言评论。精彩留言会获得点赞!