一种多母线供电的飞行器电推进装置及方法与流程
本技术涉及飞行器驱动,尤其涉及一种多母线供电的飞行器电推进装置及方法。
背景技术:
1、飞机电推进装置以电能作为能量来源,通过分布在飞机机翼和机身的单个/多个推进电机驱动推进器(如涵道风扇、螺旋桨等)产生推力,能够降低飞机的燃油消耗和污染物排放,从而支持航空业绿色发展。
2、飞机电推进装置采用电机驱动,现有技术通常采用单母线架构,通过不同能源形式(如发电机、蓄电池、燃料电池等)的电源并联之后,为推进电机控制器提供直流电,控制推进电机,实现电能到机械能的能量转换。在这种架构下,为了实现混合动力飞机多能源组合混合供电,需要增加电能变换装置,带来了控制复杂及系统增重等问题;此外,受到飞机及推进器气动外形尺寸的限制,推进电机径向尺寸往往需要约束在较小的空间之内,既会影响电机的散热,推进器叶尖速度对于转速的限制,也影响了电机转矩和功率的进一步提升。因此,现有技术无法满足飞机应用场景下对于电推进装置更大功率、更高功率密度的需求。
3、现有技术文献cn111703580a公开了一种电推进旋翼飞行器动力系统及其控制方法,该文献的飞行器动力系统能够预测飞行器功率需求,以达到较好的管理储能系统的功率输出。但该文献只考虑了使用不同形式的储能系统,未考虑发电机等能源形式,且仅考虑单母线架构,其控制方式相对单一,也没有多母线架构的冗余备份功能。
4、现有技术文献cn115257267a公开了一种强耦合油电混合系统、方法及飞行汽车,属于飞行汽车领域,当线路1或者线路2电推进动力输出存在故障,二者可以互为备份,有效提高旋翼垂直起降电推进系统安全性和可靠性,并且线路2可以提供电能,间接减少动力电池所电能和动力电池重量。当机械输出1或者机械输出2油动推进系统存在故障,二者可以互为备份,有效提高固定翼巡航推进系统安全性和可靠性,并且机械输出1可以将电能转换为机械能,间接减少发动机输出机械能和发动机重量。但该文献未使用多母线架构,因此需要额外的电能变换装置以满足不同能源形式并联的需求,增加了设备重量。
5、现有技术文献cn115432190a公开了一种电动飞机综合电推进系统,能整合集成在机翼上的分布式电推进系统和电传飞控作动系统,为电动飞机提供可靠、高效、稳定的飞行动力,同时降低系统的重量和能量损耗。该文献虽采用了多母线架构,但未考虑多种能源形式组合供电的形式,其控制方式相对单一,没有多母线的冗余备份,对电推进系统效率的提高有限。
6、现有技术文献cn115892483a公开了一种电推进系统能源架构及供能方法,属于飞机电源系统设计技术领域,能够通过燃料电池apu系统的功能复用降低飞机对主发电系统容量的需求,从而减少对于飞机发动机功率的提取,降低燃油消耗。该专利考虑了多种能源形式的并联供电,但由于未采用多母线架构,因此需要额外增加电能变换转置来匹配不同的能量源的电压等级,且未考虑多推进单元串联的方式,对电推进系统效率的提高有限。
7、综上所述,现有技术均未同时考虑多能源形式和多母线的供电架构,需采用额外的电能变换装置实现多种电压等级的并联供电,对飞机带来额外的重量代价,同时单母线及单一的能源形式也导致其控制方式的相对单一,对电推进系统效率的提高有限。
技术实现思路
1、本说明书实施例提供一种多母线供电的飞行器电推进装置及方法,用以解决如何提高飞行器电推进效率和安全性的技术问题。
2、为解决上述技术问题,本说明书实施例提供如下技术方案:
3、本说明书实施例提供一种多母线供电的飞行器电推进装置,所述装置包括:
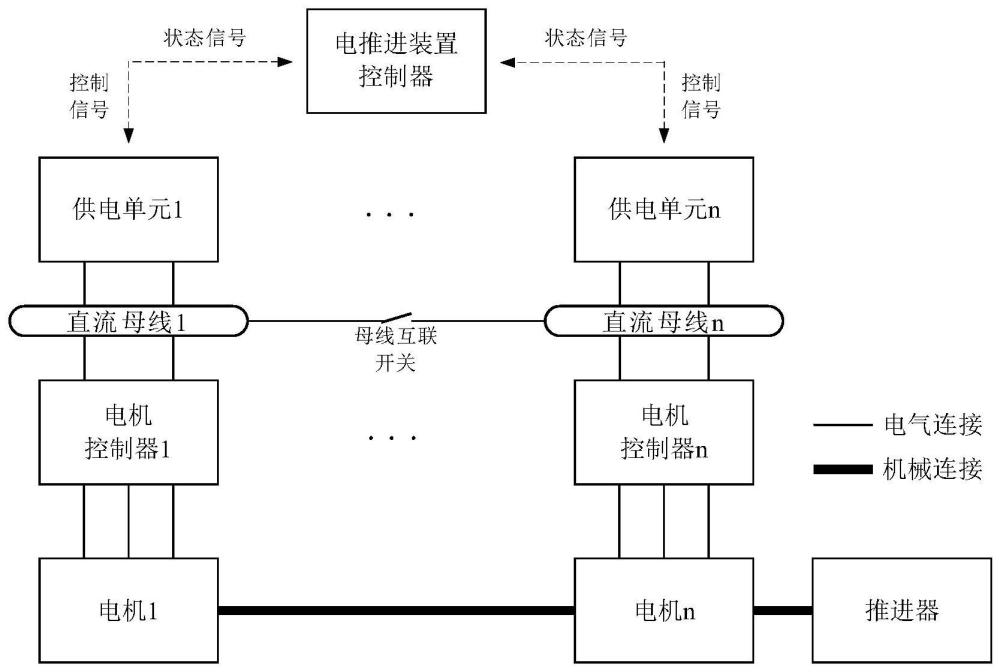
4、电推进控制模块,用于向各电推进驱动模块发送控制指令;
5、电推进驱动模块,包括依次连接的供电单元、直流母线、电机控制器、电机,所述电机控制器用于根据所述控制指令控制所述电机处于电动模式或发电模式;
6、对任一电推进驱动模块,该电推进驱动模块的直流母线与至少一个其他电推进驱动模块的直流母线之间通过开关控制单元实现连通或断开;
7、各电机机械串联,用于驱动飞行器的推进器。
8、可选的,所述电推进控制模块,还用于获取各电推进驱动模块的状态信号,根据所述状态信号向各电推进驱动模块发送控制指令。
9、可选的,所述电推进控制模块,还用于获取推进器的控制信号,根据所述控制信号向各电推进驱动模块发送控制指令。
10、本说明书实施例提供一种多母线供电的飞行器电推进方法,所述方法包括:
11、由各电推进驱动模块产生用于驱动飞行器的推进器的动力;其中,对任一电推进驱动模块,该电推进驱动模块包括依次连接的供电单元、直流母线、电机控制器、电机;该电推进驱动模块的直流母线与至少一个其他电推进驱动模块的直流母线之间可以连通或断开;
12、由各电推进驱动模块产生用于驱动飞行器的动力包括:
13、对任一电推进驱动模块,该电推进驱动模块的供电单元通过该电推进驱动模块的直流母线向该电推进驱动模块的电机控制器供电,该电推进驱动模块的电机控制器控制该电推进驱动模块的电机产生用于驱动推进器的动力;
14、获取各电推进驱动模块的状态信号,根据所述状态信号对各电推进驱动模块进行管理;
15、其中,根据所述状态信号对各电推进驱动模块进行管理包括:
16、对任一电推进驱动模块,当根据该电推进驱动模块的状态信号判断该电推进驱动模块的供电单元不满足供电条件时,使该电推进驱动模块的直流母线与至少一个其他电推进驱动模块的直流母线连通,由所述至少一个其他电推进驱动模块的供电单元向该电推进驱动模块的电机控制器供电。
17、可选的,根据该电推进驱动模块的状态信号判断该电推进驱动模块的供电单元不满足供电条件包括:
18、获取该电推进驱动模块的供电单元的状态信号,根据该电推进驱动模块的供电单元的状态信号,判断该电推进驱动模块的供电单元是否满足供电条件。
19、可选的,对各电推进驱动模块进行管理还包括:
20、若该电推进驱动模块的供电单元需要充电,则使该电推进驱动模块的电机控制器控制该电推进驱动模块的电机处于发电模式,由其他电机驱动该电推进驱动模块的电机为该电推进驱动模块的供电单元充电。
21、可选的,所述方法还包括:
22、获取推进器的控制信号,根据所述控制信号对各电推进驱动模块进行管理。
23、可选的,根据所述控制信号对各电推进驱动模块进行管理包括:
24、若根据所述控制信号判断推进器处于制动状态,则使各电机控制器控制相连接的电机处于发电模式,为可充电的供电单元充电。
25、可选的,对任一发电模式下的电机,由该电机为供电单元充电包括:
26、该电机发出的电流经该电机连接的电机控制器整流,通过相连接或连通的直流母线,为供电单元充电。
27、可选的,各电推进驱动模块的电机机械串联。
28、本说明书实施例采用的上述至少一个技术方案能够达到以下有益效果:
29、通过多母线供电架构灵活实现多能源的模块化混合供电,通过各电推进驱动模块的串联组合在不增加径向尺寸的前提下,提高电推进装置的功率,并通过多母线备份达到更好的安全性。
- 还没有人留言评论。精彩留言会获得点赞!