一种无人直升机分布式电动尾桨试验台及偏航试验方法
本发明属于无人直升机分布式电动尾桨试验领域,具体涉及一种无人直升机分布式电动尾桨试验台及偏航试验方法。
背景技术:
1、直升机具有灵活性高、速度快、特技飞行等特点,在农业生产、战场支援、消防救援、影视拍摄和电力检测等多个领域中广泛应用。然而,直升机单尾桨失效必定会导致严重事故,研制分布式电动尾桨是直升机发展的趋势。
2、在分布式电动尾桨应用在直升机上之前,搭建一种无人直升机分布式电动尾桨试验台是十分重要的。此外,直升机尾桨的作用是控制无人直升机的偏航通道以及抵消主旋翼产生的反扭力,因此需要在搭建试验台后对无人直升机分布式电动尾桨做较为全面的偏航测试。
3、关于上述测试台,现有技术中存在如下缺陷:目前国内关于无人直升机分布式电动尾桨的研究较为匮乏,分布式电动尾桨应用在直升机设计中尚未实现。当前基于分布式电动尾桨的无人直升机缺少可靠的试验台装置,不能满足相关测试的需求,导致相关测试存在危险大、高成本、低成功率等特点,严重制约了分布式电动尾桨的研发成本与周期。现有技术仅对无人直升机分布式电动尾桨的方法进行研究,且方法不完备,使得结果具有片面性。
4、因此,提出一种可靠的无人直升机分布式电动尾桨试验台,以避免无人直升机单尾桨失效引发的严重后果,是非常有必要的。
技术实现思路
1、鉴于此,本发明的目的在于提供一种无人直升机分布式电动尾桨试验台及偏航试验方法,能够最大限度满足分布式电动尾桨的试验需求。
2、本发明的技术方案是:一种无人直升机分布式电动尾桨试验台,包括主轴装置、分布式电动尾桨装置、试验台电路硬件;所述主轴装置可旋转,用于搭载无人直升机机身主体,所述分布式电动尾桨装置安装在主轴装置上,用于搭载分布式电动尾桨;
3、所述试验台电路硬件安装在主轴上,包括主控板硬件、机载mpu6050传感器,所述主控板硬件以stm32f407最小系统板作为核心处理单元,同时包含直流稳压电源模块、无线串口模块、pwm输出模块、tft屏幕模块、蜂鸣器模块、按键模块、led指示灯模块、红外遥控模块、mpu6050模块、上位机、定时器;其中pwm输出模块包括分布式电动尾桨pwm输出及无人直升机主旋翼pwm输出;
4、优选地,所述直流稳压电源模块用于向分布式电动尾桨装置供电;
5、所述机载mpu6050传感器安装在无人直升机机身主体上,用于检测无人直升机的转速、偏航角及偏航角速度;
6、机载mpu6050传感器与mpu6050模块连接,mpu6050模块与stm32f407最小系统板通信,向stm32f407最小系统板实时传输无人直升机的转速、偏航角与偏航角速度数据;
7、tft屏幕模块与stm32f407最小系统板连接,用于显示stm32f407最小系统板接收到的数据;红外遥控模块与stm32f407最小系统板连接,stm32f407最小系统板与pwm输出模块连接,用于调节无人直升机主旋翼的无刷直流电机和尾桨无刷电机的转速;stm32f407最小系统板将偏航角度、偏航角速度、通过无线串口模块实时传输至上位机,对无人直升机的状态进行实时监控;
8、机载mpu6050传感器与定时器通信,定时器不断读取机载mpu6050传感器的数据,对无人直升机偏航角与偏航角速度的连续监测和调整。
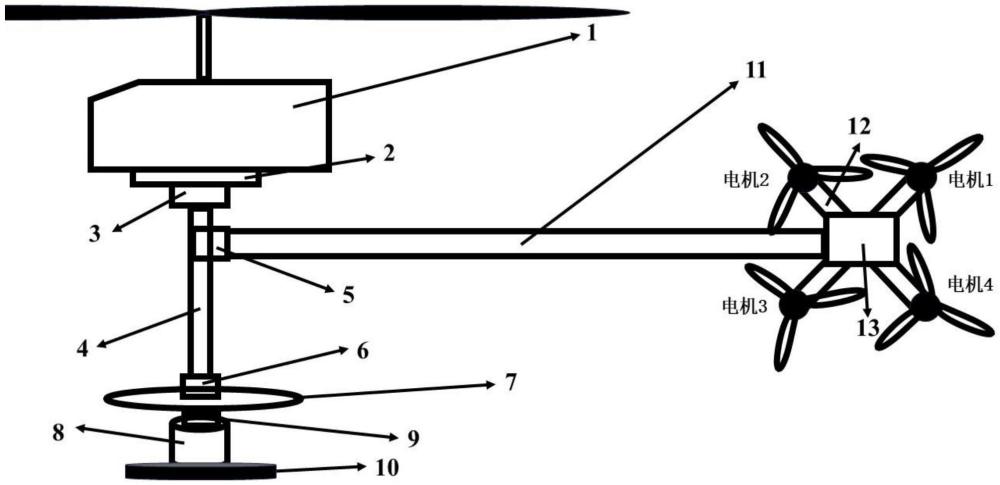
9、优选地,所述主轴装置包括机身托板、主轴-机身托板法兰、试验台主轴、尾桨固定安装夹、主轴-硬件托板法兰、硬件托板及旋转机构;其中所述旋转机构包括轴承、转动轴、试验台固定底座;
10、所述机身拖板用于放置无人直升机机身主体;主轴-机身托板法兰固定在机身托板下方;主轴-机身托板法兰与试验台主轴上端连接,试验台主轴的下部与主轴-硬件托板法兰连接;尾桨固定安装夹安装在试验台主轴上;所述试验台主轴上、主轴-硬件托板法兰下方设有硬件托板,用于固定安装试验台电路硬件与试验供电电池;
11、硬件托板下方固定在转动轴上,轴承安装在转动轴上,转动轴安装在试验台固定底座上;
12、所述分布式电动尾桨装置包括尾管组、分布式电动尾桨支撑板、尾桨安装底座、尾桨安装底座盖、四颗尾桨无刷电机、四颗尾桨电调、桨叶;所述尾管组一端固定在尾桨固定安装夹中,另一端与尾桨安装底座连接;所述分布式电动尾桨支撑板固定在尾桨安装底座外侧,1-4号四颗尾桨无刷电机按顺时针方向依次固定在分布式电动尾桨支撑板上;其中1号尾桨无刷电机和3号尾桨无刷电机设定为逆时针旋转,2号尾桨无刷电机和4号尾桨无刷电机设定为顺时针旋转,1号尾桨无刷电机和3号尾桨无刷电机上安装正桨,2号尾桨无刷电机和4号尾桨无刷电机上安装反桨;四颗尾桨电调置于尾桨安装底座中,所述尾桨电调与尾桨无刷电机对应连接,尾桨安装底座盖覆盖于尾桨安装底座上;
13、所述试验台主轴长度为27cm,尾桨固定安装件在试验台主轴安装位置为:距离主轴-机身托板法兰13.5cm处。尾管组的长度为81cm。
14、优选地,所述尾管组为中空结构,其内部装有控制分布式电动尾桨的驱动线与尾桨无刷电机、尾桨电调的供电线。
15、此外,本发明还提供了上述试验台模拟无人直升机分布式电动尾桨试验的方法,包括:
16、s1:主控板硬件电初始化,主旋翼电机和分布式尾桨电机同时通电,分布式电动尾桨设计1号电机和3号电机逆时针旋转,2号电机和4号电机顺时针旋转;
17、s2:通过红外遥控模块控制主旋翼电机、四颗尾桨无刷电机启动,主旋翼电机逆时针旋转,对无人直升机机身主体产生顺时针方向的反扭力,导致无人直升机机身主体发生偏转,观察分布式电动尾桨装置能否产生足够的逆时针方向的推力,以抵消主旋翼产生的反扭力,使无人直升机迅速达到开机自稳定状态;
18、s3:选取无人直升机稳定状态位置作为测试点,通过红外遥控模块改变主旋翼转速,进而改变对无人直升机机身主体产生的反扭力大小,观察分布式电动尾桨装置能否抵消主旋翼产生的反扭力并维持无人直升机稳定;
19、s4:选取无人直升机稳定状态位置作为测试点,通过对无人直升机机身主体施加一个偏航方向的干扰,改变无人直升机机身主体的偏航方向,观察在干扰下分布式电动尾桨装置能否立即响应并使无人直升机回正至测试点并迅速达到平衡稳定状态;
20、s5:对无人直升机机身主体施加干扰,使无人直升机机身主体偏航方向发生改变,观察分布式电动尾桨装置能否快速作出相应,使无人直升机在改变偏航方向后的位置迅速达到新平衡稳定状态;
21、s6:选取无人直升机稳定状态位置作为测试点,通过红外遥控模块操作将无人直升机机身主体偏转至预设角度,规定向左偏转角度为正数,向右偏转角度为负数,观察分布式电动尾桨装置是否能快速跟踪偏航角,在短时间内迅速而准确地调整无人直升机机身主体至目标角度并达到稳定状态。
22、本发明提供了一种无人直升机分布式电动尾桨试验台及偏航试验方法,其中的试验台机械结构简单,易于实现,通过在试验平台上进行试验,安全性高,使用方便;其包括试验台主轴装置、分布式电动尾桨装置、试验台电路硬件,通过偏航试验方法实现了无人直升机分布式电动尾桨的偏航控制;
23、该试验台应用范围广,大大拓展了现有的单尾桨试验装置,可最大限度满足分布式电动尾桨的试验需求,填补了单尾桨试验领域的空白,同时还降低了分布式电动尾桨的研发成本;
24、此外,本发明无人直升机分布式电动尾桨偏航试验方法在无人直升机偏航通道中测试完整全面,真实反映了无人直升机偏航通道的数据,具有综合性、可验证性。可以解决单尾桨失效引发的故障,提高了直升机的安全性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!