一种自动装卸搬运机器人
1.本实用新型涉及一种自动装卸搬运机器人。
背景技术:
2.在日常生活中,中小型公司通常依靠人力来搬运纸箱等货物,而大多数工厂所采用的类似叉车的货物搬运车通常用来实现一次性搬运大件货物的功能,而这样的叉车通常体积庞大并且通过人工进行搬运以及驾驶功能,无法实现自动化。
3.这种无论是人工搬运还是通过叉车实现批量搬运的搬运方式都即费时又费力,而且叉车无法实现自动化的搬运方式,也存在着体积庞大行动不便无法实现单个堆叠的缺陷,有待改良。
技术实现要素:
4.为解决上述问题,提供一种自动装卸搬运机器人,本实用新型采用了如下技术方案:
5.本实用新型提供了一种自动装卸搬运机器人,用于在设有标志的路面上自动拾取待搬运货物并搬运至待放置位置,其特征在于,包括:车身主体;驱动装置,设置在车身主体的底部;拾取装置,设置在车身主体上,包括抬起组件、与抬起组件相连接的夹取组件、拾取电机以及分别设置在抬起组件以及夹取组件上的通过拾取电机转动从而实现联动的传动机构;操作显示屏,设置在车身主体上;摄像头,设置在车身主体上,用于得到实时拍摄的影像;货物测量模块,设置在夹取组件上,用于测量待搬运货物的大小;以及自动行驶模块,设置在车身主体的底部上,用于根据识别标志从而沿路面自动行驶;其中,抬起组件为两个设有抬起用凹槽的抬起用滑轨部件,夹取组件包括拾取连接板以及四个夹取部件,拾取连接板的一面设有两条与抬起用滑轨部件配合的抬起凸条,拾取连接板的另一面的两侧宽边旁分别设有两个拾取用滑轨部件,夹取部件为杆状部件,杆状部件的一端的端面为斜面,杆状部件的另一端设有与拾取用滑轨部件配合的夹取凸条。
6.本实用新型提供的自动装卸搬运机器人,还可以具有这样的技术特征,其中,自动行驶模块包括用于巡线导航装置。
7.本实用新型提供的自动装卸搬运机器人,还可以具有这样的技术特征,其中,货物测量模块包括一个具有测距功能的测距传感器。
8.本实用新型提供的自动装卸搬运机器人,还可以具有这样的技术特征,其中,夹取部件安装有光电传感器,该光电传感器用于识别待搬运货物是否能放置在待放置位置上。
9.本实用新型提供的自动装卸搬运机器人,还可以具有这样的技术特征,其中,驱动装置包括车轮、连接车轮的轮轴以及连接轮轴的驱动电机。
10.本实用新型提供的自动装卸搬运机器人,还可以具有这样的技术特征,其中,操作显示屏为触摸显示屏。
11.实用新型作用与效果
12.根据本实用新型的自动装卸搬运机器人,自动装卸搬运机器人包括车身主体、驱动装置、拾取装置、操作显示屏、摄像头、货物测量模块、自动行驶模块以及中心处理器。通过拾取装置实现夹取待搬运部件并抬起的功能,通过自动行驶模块进行自动导航至指定位置的功能,实现了从拾取到写在的全程自动化功能,具有替代人工搬运可以让公司节省搬运成本的特点。与此同时较小的车身主体、驱动装置、拾取装置能够减少所需占用的体积,从而节省出更多空间。
附图说明
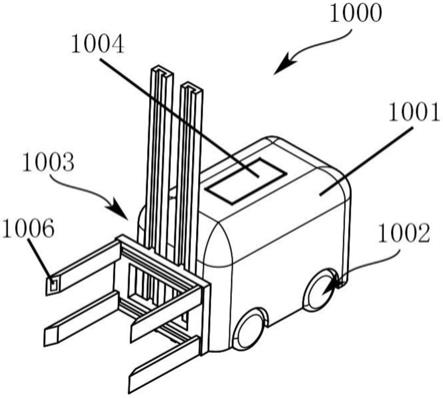
13.图1是本实用新型实施例中的自动装卸搬运机器人的三维示意图;
14.图2是本实用新型实施例中的自动装卸搬运机器人中的仰视示意图;
15.图3是本实用新型实施例中的自动装卸搬运机器人中拾取装置的示意图;
16.图4是本实用新型实施例中的自动装卸搬运机器人中实现夹取的工作示意图;
17.图5是本实用新型实施例中的自动装卸搬运机器人中抬起的工作示意图;以及
18.图6是本实用新型实施例中的自动装卸搬运机器人中放置货物后的工作示意图。
具体实施方式
19.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,以下结合实施例及附图对本实用新型的自动装卸搬运机器人作具体阐述。
20.<实施例>
21.自动装卸搬运机器人用于实现在设有标志的路面上自动拾取待搬运货物并搬运至待放置位置的作用。
22.图1是本实用新型实施例中的自动装卸搬运机器人的三维示意图。
23.图2是本实用新型实施例中的自动装卸搬运机器人中的仰视示意图。
24.如图1以及图2所示,自动装卸搬运机器人1000包括车身主体1001、驱动装置1002、拾取装置1003、操作显示屏1004、摄像头1005、货物测量模块1006、自动行驶模块1007以及中心处理器1008。
25.中心处理器1008与驱动装置1002、拾取装置1003、操作显示屏1004、摄像头1005、货物测量模块1006以及自动行驶模块1007具有电连接。
26.驱动装置1002,设置在车身主体1001的底部。
27.其中,驱动装置1002包括车轮、连接车轮的轮轴以及连接轮轴的驱动电机。
28.拾取装置1003,设置在车身主体1001上,包括抬起组件101、与抬起组件101相连接的夹取组件102、拾取电机以及分别设置在抬起组件101以及夹取组件102上的通过电机转动从而实现联动的传动机构。传动装置分别放置在抬起用凹槽以及拾取用凹槽中,例如铰链。
29.其中,抬起组件101为两个设有抬起用凹槽的抬起用滑轨部件11以及带动夹取组件102的抬起电机。
30.夹取组件102包括拾取连接板21以及四个夹取部件22。
31.图2是本实用新型实施例中的自动装卸搬运机器人中拾取装置的示意图。
32.如图2所示,夹取部件102安装有光电传感器,光电传感器用于识别待搬运货物是
否能放置在待放置位置上。
33.拾取连接板21的一面设有两条与抬起用滑轨部件配合的抬起凸条。
34.拾取连接板21的另一面的两侧宽边旁分别设有两个拾取用滑轨部件。
35.夹取部件22为杆状部件,杆状部件的一端的端面为斜面,杆状部件的另一端设有与拾取用滑轨部件配合的夹取凸条。
36.操作显示屏1004,设置在车身主体1001上,用于设置当出现无法实现搬运时设置搬运车的搬运轨迹的功能。
37.其中,操作显示屏1004为触摸显示屏。
38.摄像头1005,设置在车身主体1001上,用于得到实时拍摄的影像。
39.货物测量模块1006,设置在夹取组件102上,用于测量待搬运货物的大小。
40.其中,货物测量模块1006包括一个具有测距功能的测距传感器。
41.自动行驶模块1007,设置在车身主体1001的底部上,用于根据识别标志从而沿路面自动行驶。
42.其中,自动行驶模块1007采用巡线导航技术。
43.摄像头1005检测到车身主体1001前有待搬运货物就向中心处理器1008发送检测货物大小信号。
44.中心处理器1008接受到检测货物大小信号并驱动货物测量模块1006进行检测。
45.货物测量模块1006检测到待搬运货物大小信息向中心处理器1008发送搬运信号。
46.图3是本实用新型实施例中的自动装卸搬运机器人中实现夹取的工作示意图。
47.中心处理器1008接收到搬运信号并对拾取电机进行驱动,拾取电机带动传动机构联动,从而使得夹取部件22之间的距离与待搬运货物大小信息一致,从而到达图3状态。
48.拾取电机向中心处理器1008发送拾取结束信号。
49.图4是本实用新型实施例中的自动装卸搬运机器人中抬起的工作示意图。
50.中心处理器1008接收到拾取结束信号,对抬起电机进行驱动并对抬起组件101进行抬起从而到达图4的状态,并向中心处理器1008发送新的待放置位置信号。
51.中心处理器1008发送新的待放置位置信号,并向自动行驶模块1007发送路线规划信息。
52.自动行驶模块1007根据路线规划信息制定指定路线并发送给驱动装置1002。
53.驱动装置1002接收到指定路线,对驱动电机进行驱动,并向自动行驶模块1007发送实时检测位置信号。
54.自动行驶模块1007将实时检测位置信号发送给中心处理器1008。
55.中心处理器1008接收到实时检测位置信号,并驱动光电传感器进行识别。
56.一旦识别结果为可以时,光电传感器向中心处理器1008发送放置货物信号。
57.中心处理器1008接收到放置货物信号并将放置货物信号发送给驱动装置1002。
58.驱动装置1002接收到放置货物信号并对驱动电机进行驱动,将待放置货物放置在待放置位置,并向中心处理器1008发送驱动夹取部件信号。
59.图5是本实用新型实施例中的自动装卸搬运机器人中放置货物后的工作示意图。
60.中心处理器1008接收到驱动夹取部件信号并对拾取电机进行驱动并到达图5状态,完成放置货物。
61.一旦识别结果为不可以时,光电传感器向中心处理器1008发送新的待放置位置信号,并通过自动行驶模块1007制定新的指定路线来更换待放置位置。
62.实施例作用与效果
63.根据本实施例提供的自动装卸搬运机器人,自动装卸搬运机器人包括车身主体、驱动装置、拾取装置、操作显示屏、摄像头、货物测量模块、自动行驶模块以及中心处理器。通过拾取装置实现夹取待搬运部件并抬起的功能,通过自动行驶模块进行自动导航至指定位置的功能,实现了从拾取到写在的全程自动化功能,具有替代人工搬运可以让公司节省搬运成本的特点。与此同时较小的车身主体、驱动装置、拾取装置能够减少所需占用的体积,从而节省出更多空间。
64.实施例中,通过货物测量模块实现判断待搬运货物大小,从而根据待搬运货物大小并通过夹取组件进行精准夹取。
65.实施例中,通过自动行驶模块控制搬运车行驶到指定位置,使得根据地面上的标志自主行驶,并根据环境的变化从而实现根据不同指定路线的行驶功能。
66.实施例中,通过操作显示屏实现让用户设置搬运车的搬运轨迹的功能。
67.实施例中,通过摄像头从而实现实时监控仓库内货物摆放情况的功能,并且能够得到是否能在待放置位置放置。
68.实施例中,通过自动行驶模块以及光电传感器,从而实现根据自动行驶模块检测到的当前位置是大型货物和小型货物两个区域,以及根据光电传感器判断带放置位置是否有货物,并由此进行实时路线规划的功能。
69.上述实施例仅用于举例说明本实用新型的具体实施方式,而本实用新型不限于上述实施例的描述范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1