倾斜度调整装置与倾斜度调整方法与流程
1.本发明涉及智能制造领域,特别涉及一种倾斜度调整装置与倾斜度调整方法。
背景技术:
2.目前智能制造和智能物流领域由于自动化程度越来越高,工厂越来越往少人化方向去发展,所以越来越多的,会面临设备与设备之间需要自动进行对接的问题。在以往的技术中,存在由于地面不平整、驱动执行机构等原因,导致对接精度不高,从而无法满足两台设备之间相对位置关系,而无法正常对接工作,其中倾斜度就是其中一个比较关键的很难处理的误差。
3.目前smt(surface mounted technology,表面贴装技术)产线上,托盘芯片上下料设备就面临以上情况,其中托盘是指装载芯片的料盘,目前smt产线上,当芯片供料器(譬如nxt lt型供料器)缺料,基本都是操作人员将芯片放置在托盘内,再将芯片供料器的空托盘取出,最后将装有芯片的托盘补充到芯片供料器对应的位置。
4.要实现自动化制造,与芯片供料器对接的设备首先需要解决倾斜精度的问题。这是由于芯片在放入芯片供料器时,需要平整的推入,即不能有抖动,否则极可能导致芯片上料过程抖散,导致贴片故障。但是,现有的设备在自动进行对接的过程中,受地面不平,设备对接装置精度等因素影响,倾斜度一般无法达到工作要求。因此,对产线进一步提高自动化,降低生产成本造成阻碍。
技术实现要素:
5.本发明的目的在于提供一种倾斜度调整装置与倾斜度调整方法,可以解决现有技术的一或多个缺陷。
6.为了实现上述目的,依据本发明的一实施例,本发明提供了一种倾斜度调整装置,其包括:倾斜度侦测机构以及倾斜度调节机构。所述倾斜度侦测机构包括:多个光学标记点,沿第一方向呈一条直线布置在第一设备上;以及光学传感器,安装在工作平台上,并与所述工作平台一起设置在第二设备上,所述光学传感器用以采集所述光学标记点的位置信息。所述倾斜度调节机构设置在第二设备上,并与所述工作平台相连接。其中,所述倾斜度侦测机构被配置为侦测所述工作平台在所述第一方向上的倾斜度,所述倾斜度调节机构被配置为调整所述工作平台在所述第一方向上的所述倾斜度。
7.在本发明的一实施例中,所述倾斜度调整装置还包括:图像采集处理单元,与所述光学传感器以及所述倾斜度调节机构相连接,并被配置为根据所述光学标记点的所述位置信息计算所述工作平台在所述第一方向上的倾斜度。
8.在本发明的一实施例中,所述光学标记点为能够发出红外光的led光源,所述光学传感器为能够识别所述红外光的相机。
9.在本发明的一实施例中,所述第一方向为水平方向。
10.在本发明的一实施例中,所述光学传感器为相机,所述图像采集处理单元还包括:
显示器,用以显示所述相机的视野原点、所述相机的第一参考线、以及由所述多个光学标记点限定的倾斜度参考线,其中所述第一参考线穿过所述视野原点,所述倾斜度参考线沿所述第一方向延伸。
11.在本发明的一实施例中,所述多个光学标记点包括位于两边的两个边缘标记点以及位于所述两个边缘标记点之间的一个中心标记点;其中,所述显示器还显示所述中心标记点对应的倾斜中心。
12.在本发明的一实施例中,所述倾斜度调节机构包括:固定底座,安装在所述第二设备上,并与所述工作平台可转动地连接;转动机构,安装在所述固定底座上;以及移动机构,连接所述转动机构与所述工作平台,被配置为将所述转动机构产生的旋转转动转换成沿第二方向的平行移动,其中,所述第二方向垂直于所述第一方向,所述移动机构能够带动所述工作平台沿所述第二方向移动以调整所述工作平台在所述第一方向上的所述倾斜度。
13.在本发明的一实施例中,所述转动机构包括:驱动装置,具有驱动轴;轴承支座,固定安装在所述固定底座上;轴承,安装在所述轴承支座上;螺纹套筒,套接在所述轴承之上;第一皮带轮,套接在所述驱动轴之上;第二皮带轮,套接在所述螺纹套筒之上;以及皮带,连接所述第一皮带轮与所述第二皮带轮,其中,所述驱动装置能够驱动所述第一皮带轮通过所述皮带,带动所述第二皮带轮旋转,进而带动所述螺纹套筒产生旋转转动。
14.在本发明的一实施例中,所述移动机构包括:限位块,固定安装在所述工作平台的底部;限位轴,所述限位轴的第一端与所述限位块铰接;以及螺纹杆,所述螺纹杆的第一端与所述限位轴的第二端固定连接,所述螺纹杆的第二端与所述螺纹套筒螺纹连接,其中,所述螺纹套筒的旋转转动能够带动所述螺纹杆沿所述第二方向平行移动。
15.在本发明的一实施例中,所述驱动装置以及所述轴承支座是沿所述第一方向间隔布置。
16.在本发明的一实施例中,所述限位块上具有沿所述第一方向设置的活动槽,所述限位轴的所述第一端与所述限位块铰接于所述活动槽中。
17.在本发明的一实施例中,所述固定底座与所述工作平台的所述底部的中间部分铰接,所述轴承支座固定在所述固定底座的一侧。
18.为了上述目的,本发明另提供一种倾斜度调整方法,其包括:
19.步骤s1、在第一设备上沿第一方向呈一条直线布置多个光学标记点;
20.步骤s2、将光学传感器安装在工作平台上,并将所述光学传感器和所述工作平台一起设置在第二设备上,通过所述光学传感器采集所述光学标记点的位置信息;
21.步骤s3、将图像采集处理单元与所述光学传感器相连接,所述图像采集单元根据所述光学标记点的所述位置信息计算所述工作平台在所述第一方向上的倾斜度;
22.步骤s4、将倾斜度调节机构设置在第二设备上,并将所述倾斜度调节机构与所述工作平台连接,通过所述倾斜度调节机构调整所述工作平台在所述第一方向上的所述倾斜度。
23.在本发明的另一实施例中,所述光学标记点为能够发出红外光的led光源,所述光学传感器为能够识别所述红外光的相机。
24.在本发明的另一实施例中,所述第一方向为水平方向。
25.在本发明的另一实施例中,所述光学传感器为相机,所述图像采集处理单元还包
括显示器,其至少能够显示所述相机的视野原点、所述相机的第一参考线、以及由所述多个光学标记点限定的倾斜度参考线,其中所述第一参考线穿过所述视野原点,所述倾斜度参考线沿所述第一方向设置;其中,在所述步骤s4中,通过所述倾斜度调节机构对所述工作平台的所述倾斜度的调整,使得倾斜度参考线与所述相机的第一参考线重叠。
26.在本发明的另一实施例中,所述多个光学标记点包括位于两边的两个边缘标记点以及位于所述两个边缘标记点的中心的一个中心标记点;其中,在所述步骤s4中,通过所述倾斜度调节机构对所述工作平台的所述倾斜度的调整,使得所述中心标记点对应的倾斜中心与所述相机的视野原点重叠。
27.在本发明的另一实施例中,在所述步骤s4中,所述倾斜度调节机构调整所述工作平台的所述倾斜度具体包括:所述倾斜度调节机构产生旋转转动;所述倾斜度调节机构将所述旋转转动转换成沿第二方向的平行移动,并带动所述工作平台沿所述第二方向移动,以调整所述工作平台在所述第一方向上的所述倾斜度,其中,所述第二方向垂直于所述第一方向。
28.本发明通过采用光学自动校准以及自动调整的方式,有效地解决了设备对接的时候,由于存在倾斜度的偏差而无法正常对接的情况。与现有技术相比,本发明的有益效果为:
29.1、设置了光学自动校准位置采集装置,通过传感器采集数据,计算得到倾斜角的误差。
30.2、设置了倾斜度调节机构,通过倾斜度调节机构实现了对工作平台水平方向的倾斜度进行调整,进而实现了与机台对接水平方向倾斜度的调整。
31.本发明的额外方面和优点将部分地在下面的描述中阐述,并且部分地将从描述中变得显然,或者可以通过本发明的实践而习得。
附图说明
32.通过参照附图详细描述其示例实施方式,本发明的上述和其它特征及优点将变得更加明显。
33.图1为本发明的一较佳实施例中所提供的一种倾斜度调整装置应用于对接的第一设备和第二设备上的结构示意图;
34.图2为本发明的一较佳实施例中所提供的一种带电动导轨的工作平台的示意图;
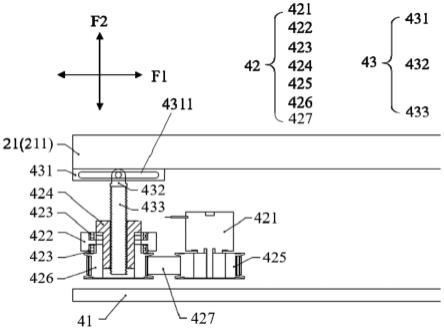
35.图3为本发明的倾斜度调节机构的整体正视图;
36.图4为图3中的倾斜度调节机构的局部视图。
37.图5为本发明的一较佳实施例中在自动调整设备的倾斜度位置时的相机的成像视野的状态示意图;
38.图6为本发明的一较佳实施例中所提供的一种倾斜度调整方法的流程示意图。
具体实施方式
39.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的实施方式;相反,提供这些实施方式使得本发明将全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。图中相同的附图
标记表示相同或类似的结构,因而将省略它们的详细描述。
40.在介绍这里所描述和/或图示的要素/组成部分/等时,用语“一个”、“一”、“该”、“所述”和“至少一个”用以表示存在一个或多个要素/组成部分/等。术语“包含”、“包括”和“具有”用以表示开放式的包括在内的意思并且是指除了列出的要素/组成部分/等之外还可存在另外的要素/组成部分/等。实施方式中可能使用相对性的用语,例如“上”或“下”以描述图标的一个组件对于另一组件的相对关系。能理解的是,如果将图标的装置翻转使其上下颠倒,则所叙述在“上”侧的组件将会成为在“下”侧的组件。此外,权利要求书中的术语“第一”、“第二”等仅作为标记使用,不是对其对象的数字限制。
41.如图1所示,其示出了本发明的一较佳实施例中所提供的一种倾斜度调整装置100应用于对接的第一设备10和第二设备20上的结构。在图1中,所述第一设备10例如可为smt产线上的芯片供料器,所述第二设备20例如可为托盘芯片上下料设备。当然,可以理解的是,本发明中的倾斜度调整装100也可以应用于需对接的其他两个设备,这并不作为对本发明的限制。
42.在本发明中,如图1所示,所述倾斜度调整装置100可包括倾斜度侦测机构30以及倾斜度调节机构40。其中,所述倾斜度侦测机构30可包括多个光学标记点31以及光学传感器32。所述多个光学标记点31沿第一方向(例如为水平方向,如图1中的x轴方向)呈一条直线布置在所述第一设备10上。所述光学传感器32安装在一工作平台21上,并与所述工作平台21一起设置在所述第二设备20上,所述光学传感器32可用以采集所述光学标记点31的位置信息。在一些实施例中,所述光学标记点31可包括两个或更多个的光学标记点,这些光学标记点例如可为能够发出红外光的led光源。所述光学传感器32例如可为能够识别所述红外光的相机。其中,所述倾斜度侦测机构30被配置为可侦测所述工作平台21在所述第一方向上的倾斜度。
43.所述倾斜度调节机构40是设置在所述第二设备20上,并与所述工作平台21相连接。其中,所述倾斜度调节机构40被配置为可调整所述工作平台21在所述第一方向上的所述倾斜度。
44.在其他实施例中,本发明的所述倾斜度调整装置100还可包括图像采集处理单元50,其可与所述光学传感器32以及所述倾斜度调节机构40相连接,并被配置为可根据所述光学标记点31的所述位置信息计算所述工作平台21在所述第一方向上的倾斜度。
45.在图1所示的实施例中,所述多个光学标记点31设置于所述第一设备10(即芯片供料器)的存储格11的下方的一个端面上并呈一条直线布置。这些光学标记点31例如可包括位于两边的两个边缘标记点以及位于所述两个边缘标记点之间的一个中心标记点。当然,在其他实施例中,这些光学标记点31也可以仅包括两个边缘标记点,这些并不作为对本发明的限制。
46.当所述光学传感器32为相机时,所述图像采集处理单元50还可进一步还包括显示器51,其可用以至少显示所述相机的成像视野a1,例如包括所述相机的视野原点o以及所述相机的第一参考线ref 11,其中所述第一参考线ref11是穿过所述视野原点o(如图5所示)并沿图中点a与点c的连线方向(即图5中的水平方向)延伸。所述显示器51还可用以显示由所述多个光学标记点31限定的第一倾斜度参考线ref 21,其中,所述第一倾斜度参考线ref 21是沿所述第一方向延伸,并由两个标记点(例如两个边缘标记点)在所述相机的成像视野
a1中对应的位置点连线所限定,其可反映出所述工作平台21在所述第一方向上的倾斜度,例如可通过水平误差£1、£2来体现。当存在中心标记点时,所述第一倾斜度参考线ref 21还穿过所述中心标记点在所述相机的成像视野a1中对应的倾斜中心o1,所述显示器51还可显示所述中心标记点对应的倾斜中心o1。当然,可以理解的是,在其他实施例中,所述显示器51还可显示所述相机的第二参考线ref 12,其例如可沿第二方向(例如图中视野原点o与点b之间的连线,即图5中的纵向方向)延伸,并穿过所述视野原点o。进一步地,所述显示器51还可显示第二倾斜度参考线ref 22,其是在第二方向上延伸,其例如可体现出所述工作平台21的纵向误差£3、£4(等同于水平误差)。
47.如图2所示,其示出了本发明的一较佳实施例中所提供的一种带电动导轨的工作平台21的结构。在本实施例中,所述工作平台21例如可带有纵向电动导轨25和横向电动导轨26,所述工作平台21通过所述纵向电动导轨25可沿纵向方向(例如图2中的z’轴方向)移动,通过所述横向电动导轨26可沿横向方向(例如图2中的x’轴方向)移动。在图2所示的实施例中,所述工作平台21例如可包括一传输平台213,所述传输平台213例如可通过一旋转机构(图中未示)可转动地安装于一旋转底座211之上。所述工作平台21通过所述旋转底座211活动地安装于一固定底座41上。其中,所述横向电动导轨26和所述倾斜度调节机构40例如可设置于所述旋转底座211与所述固定底座41之间的空间。
48.如图3和图4所示,其示出了本发明的一较佳实施例的倾斜度调节机构40的结构。为了图面清晰,图中仅示意性的画出所述工作平台21的所述旋转底座211,而省略了安装于所述旋转底座211之上的其他结构。在本发明中,所述倾斜度调节机构40主要包括:固定底座41、转动机构42以及移动机构43。其中,所述固定底座41是安装在所述第二设备20上(例如固定安装于所述纵向电动导轨25上),并与所述工作平台21可转动地连接。所述转动机构42是安装在所述固定底座41上。所述移动机构43是连接所述转动机构42与所述工作平台21,并被配置为可将所述转动机构42产生的旋转转动转换成沿第二方向f2(例如可与图2中的z’轴方向为相同方向)的平行移动,其中,所述第二方向f2垂直于第一方向f1(例如可与图2中的x’轴方向为相同方向),所述移动机构43能够带动所述工作平台21沿所述第二方向f2移动以调整所述工作平台21在所述第一方向f1上的倾斜度。
49.在本实施例中,所述转动机构42例如可包括驱动装置421、轴承支座422、轴承423、螺纹套筒424、第一皮带轮425、第二皮带轮426以及皮带427。所述驱动装置421例如可为马达,其可具有驱动轴。所述轴承支座422是固定安装在所述固定底座41上。所述轴承423是安装在所述轴承支座422上。所述螺纹套筒424是套接在所述轴承423之上。所述第一皮带轮425是套接在所述驱动装置421的所述驱动轴之上。所述第二皮带轮426是套接在所述螺纹套筒424之上。所述皮带427是连接所述第一皮带轮425与所述第二皮带轮426。其中,所述驱动装置421能够驱动所述第一皮带轮425通过所述皮带427,带动所述第二皮带轮426旋转,进而带动所述螺纹套筒424产生旋转转动。
50.所述移动机构43例如可包括限位块431、限位轴432以及螺纹杆433。其中,所述限位块431是固定安装在所述工作平台21的底部,例如安装于所述旋转底座211的底部。所述限位轴432的第一端是与所述限位块431铰接,例如,可在所述限位块431上开设沿所述第一方向f1设置的活动槽4311,所述限位轴432的所述第一端与所述限位块431铰接于所述活动槽4311中。所述螺纹杆433的第一端是与所述限位轴432的第二端固定连接,所述螺纹杆433
的第二端是与所述螺纹套筒424螺纹连接。如此,所述螺纹套筒424的旋转转动能够带动所述螺纹杆433沿所述第二方向f2平行移动。
51.在本发明中,由于所述第二皮带轮426与所述螺纹套筒424组成了一个封闭框将所述轴承423以及所述轴承支座422夹持住,而所述轴承支座422固定在所述固定底座421上,所以第二皮带轮426以及所述螺纹套筒424只能旋转而不能上下攒动。因此,当所述驱动装置421驱动所述第一皮带轮425通过所述皮带427,可带动所述第二皮带轮426旋转,由于所述螺纹套筒424与所述第二皮带轮426固定,从而可带动所述螺纹套筒426旋转。由于所述螺纹套筒424不能上下攒动只能旋转,而由于螺纹连接的特性,所述螺纹杆433不能旋转而只能上下平移,所以当所述螺纹套筒424旋转时就会驱动所述螺纹杆433沿所述第二方向f2上、下平移,从而实现了通过所述驱动装置421驱动所述螺纹杆433平移,进而实现了活动的旋转底座211(即工作平台21)的倾斜度的调整。
52.较佳地,所述驱动装置421以及所述轴承支座422可沿所述第一方向f1间隔布置,以更节省安装空间。另外,所述固定底座41较佳地可与所述工作平台21(或旋转底座211)的底部的中间部分铰接,而所述轴承支座422例如可固定在所述固定底座41的一侧,例如固定在图4中所述固定底座41的顶部的左侧。
53.结合参考图1~5,如图6所示,本发明提供的一种倾斜度调整方法200主要包括:
54.步骤s1、在第一设备10上沿第一方向呈一条直线布置多个光学标记点31;
55.步骤s2、将光学传感器32安装在工作平台21上,并将所述光学传感器32和所述工作平台21一起设置在第二设备20上,通过所述光学传感器32采集所述光学标记点31的位置信息;
56.步骤s3、将图像采集处理单元50与所述光学传感器32相连接,所述图像采集单元50根据所述光学标记点31的所述位置信息计算所述工作平台21在所述第一方向上的倾斜度;
57.步骤s4、将倾斜度调节机构40设置在第二设备20上,并将所述倾斜度调节机构40与所述工作平台21连接,通过所述倾斜度调节机构40调整所述工作平台21在所述第一方向上的所述倾斜度。
58.在所述步骤s4中,可包括:通过所述倾斜度调节机构40对所述工作平台21的所述倾斜度的调整,使得第一倾斜度参考线ref 21与所述相机的第一参考线ref 11重叠。
59.在所述步骤s4中,还可包括:通过所述倾斜度调节机构40对所述工作平台21的所述倾斜度的调整,使得所述中心标记点对应的倾斜中心o1与所述相机的视野原点o重叠。
60.在本发明中,在所述步骤s4中,所述倾斜度调节机构40调整所述工作平台21的所述倾斜度具体可包括:所述倾斜度调节机构40产生旋转转动;所述倾斜度调节机构40将所述旋转转动转换成沿第二方向(例如图2中的z’轴方向)的平行移动,并带动所述工作平台21沿所述第二方向移动,以调整所述工作平台21在第一方向(例如图2中的x’轴方向)上的倾斜度,其中,所述第二方向垂直于所述第一方向。
61.如图5所示,其示出了本发明一较佳实施例在自动调整设备的倾斜度位置时的相机的成像视野的状。此实施例例如是采用位于同一直线上的3颗led光源,通过图2中的纵向电动导轨25,以及横向电动导轨26,可以将三颗led光源中位于中间位置的那颗led光源(即中心标记点)进行位置补偿,即使其对应的倾斜中心o1的位置误差δx、δy补偿至与相机的
视野原点o重合,再将另外两颗led光源所产生的水平误差£1,£2(纵向误差£3,£4等同于水平误差)通过如图3和图4所示的倾斜度调节机构40调整至水平,即完成了倾斜度的调校。
62.本发明通过采用光学自动校准以及自动调整的方式,有效地解决了设备对接的时候,由于存在倾斜度的偏差而无法正常对接的情况。与现有技术相比,本发明的有益效果为:
63.1、设置了光学自动校准位置采集装置,通过传感器采集数据,计算得到倾斜角的误差。
64.2、设置了倾斜度调节机构,通过倾斜度调节机构实现了对工作平台水平方向的倾斜度进行调整,进而实现了与机台对接水平方向倾斜度的调整。
65.以上具体地示出和描述了本发明的示例性实施方式。应该理解,本发明不限于所公开的实施方式,相反,本发明意图涵盖包含在所附权利要求的精神和范围内的各种修改和等效布置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1