自动化集装箱码头水平运输装置及其水平运输方法
1.本发明涉及码头水平运输装置,更具体地说,涉及一种自动化集装箱码头水平运输装置及其水平运输方法。
背景技术:
2.为减少操作人员、降低运营成本、提高作业效率和提升港口核心竞争力,越来越多的国家选择新建自动化集装箱码头。目前集装箱码头的作业过程主要由三个部分组成:岸边作业、水平运输作业和堆场作业。在水平运输作业过程中现有自动化集装箱码头大多使用无轨自动引导小车(agv或igv)。由于无轨自动引导小车装卸能力有限且移动速度较慢,这就导致码头必须大量使用无轨自动引导小车才能满足作业需求。无轨自动引导小车数量达到一定程度后不仅在控制上有较大难度,需要强有力的it团队对无轨自动引导小车的调度算法进行更新升级,即使这样无轨自动引导小车的路径冲突情况仍时常发生,效率无法充分发挥,而且也会带来高额的投资成本、运营成本,日常的维护难度也大大提高。同时,无线网络信号强弱,大雨大雾天气等其他条件对无轨自动引导小车的作业也有很大影响。在水平运输作业中使用无轨自动引导小车的弊端无法再被忽视,已经成为限制自动化集装箱码头装卸效率提升、运营成本降低、作业安全性提高的重要因素。
技术实现要素:
3.本发明要解决的技术问题在于,提供一种能够使集装箱从码头前沿到堆场的移动更加快速简洁,能够增加堆场面积、提高港口土地使用率的自动化集装箱码头水平运输装置及其水平运输方法。
4.本发明解决其技术问题所采用的技术方案是:构造一种自动化集装箱码头水平运输装置,包括轨道吊,还包括前水平轨道、后水平轨道、竖直轨道和旋转交接模块,所述前水平轨道设置在集装箱装卸桥侧面,所述后水平轨道设置在堆场侧面,所述轨道吊设置在堆场上,所述竖直轨道设置在所述前水平轨道和后水平轨道之间,所述竖直轨道与所述前水平轨道相交处、所述竖直轨道与所述后水平轨道相交处设有所述旋转交接模块,所述竖直轨道分别垂直于所述前水平轨道、所述后水平轨道;
5.所述旋转交接模块包括设置在底层的旋转电机,所述旋转电机上设置有旋转圆盘,所述旋转电机驱动所述旋转圆盘转动,所述旋转圆盘上部设置有用于与所述前水平轨道、后水平轨道或竖直轨道相接的十字轨道。
6.上述方案中,所述前水平轨道、后水平轨道和竖直轨道为凹轨。
7.上述方案中,所述前水平轨道上设置有用于放置集装箱的运输小车,所述运输小车沿所述水平轨道移动。
8.上述方案中,所述运输小车上设置有用于固定集装箱的自动扭锁。
9.上述方案中,所述旋转圆盘上设置有用于感应运输小车的感应装置。
10.本发明还提供了一种自动化集装箱码头水平运输装置的水平运输方法,包括如下
步骤:
11.s1、从码头前沿的集装箱装卸桥将集装箱从船舶上吊起;
12.s2、将集装箱装卸桥将吊起的集装箱放置到所述前水平轨道上处于空闲状态的所述运输小车上,集装箱摆放方向与所述前水平轨道方向平行;
13.s3、在所述运输小车装上集装箱后,沿所述前水平轨道移动,到达最近所述前水平轨道与所述竖直轨道相交的所述旋转交接模块;
14.s4、在所述旋转交接模块带着所述运输小车旋转90度后,与所述竖直轨道相连在一起;
15.s5、在所述运输小车离开所述旋转交接模块后,沿着所述竖直轨道移动,到达所述竖直轨道与所述后水平轨道相交的所述旋转交接模块;
16.s6、所述旋转交接区带着运输小车旋转90度后,与所述后水平轨道相连;
17.s7、所述运输小车沿着所述后水平轨道移动,到达目标堆场的轨道吊作业范围内;
18.s8、目标堆场的轨道吊将所述运输小车的集装箱吊起并放置于指定位置;
19.s9、运输小车沿原路返回到集装箱装卸桥下,等待下一次运输。
20.上述方案中,所述步骤s8中,当所述运输小车指定的位置位于堆场深处时,由多个轨道吊接力将集装箱放到指定位置。
21.实施本发明的自动化集装箱码头水平运输装置及其水平运输方法,具有以下有益效果:
22.1、本发明在自动化集装箱码头的水平运输作业过程中加入了轨道交通和运输小车组合运输方式,使得集装箱从码头前沿到堆场的移动更加快速简洁。与现有的技术相比,轨道运输小车控制简单、准确,数量要求低,维护难度小,能够大大降低初始投资成本以及后期运营成本。
23.2、本发明在自动化集装箱码头的水平运输作业过程中使用轨道交通和运输小车组合的运输方式,避免了大量使用无轨自动引导小车带来的路径冲突情况时有发生、效率无法充分发挥、受天气因素影响较大等弊端,能够提高集装箱码头装卸效率和运输安全。
24.3、本发明在自动化集装箱码头水平运输作业中使用轨道交通和运输小车组合的运输方式,可以明显缩短堆场与码头前沿的距离,能够增加堆场面积、提高港口土地使用率。
附图说明
25.下面将结合附图及实施例对本发明作进一步说明,附图中:
26.图1是自动化集装箱码头水平运输装置的运输流程示意图;
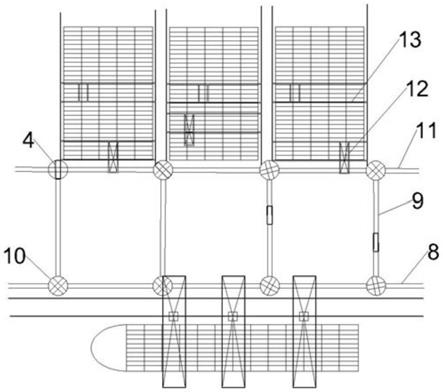
27.图2是自动化集装箱码头水平运输装置中码头前沿到堆场部分的平面示意图;
28.图3是旋转交接模块的俯视图;
29.图4是旋转交接模块的结构示意图;
30.图5是运输小车的结构示意图。
具体实施方式
31.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明
本发明的具体实施方式。
32.如图1
‑
5所示,本发明的自动化集装箱码头水平运输装置包括轨道吊6、前水平轨道8、后水平轨道11、竖直轨道9和旋转交接模块10,前水平轨道8、后水平轨道11和竖直轨道9为凹轨。前水平轨道8设置在集装箱装卸桥1侧面,后水平轨道11设置在堆场7侧面,轨道吊6设置在堆场7上。竖直轨道9设置在前水平轨道8和后水平轨道11之间,竖直轨道9与前水平轨道8相交处、竖直轨道9与后水平轨道11相交处为旋转交接模块10,竖直轨道9分别垂直于前水平轨道8、后水平轨道11;
33.前水平轨道8上设置有可放置集装箱的运输小车4,运输小车4可沿水平轨道移动。运输小车4上设置有能固定集装箱的自动扭锁5。当集装箱规格为20英尺,集装箱放置于运输小车4的中间凹槽位置。当集装箱规格为40英尺,集装箱放置于运输小车4的凸起位置。
34.码头前沿使用集装箱装卸桥1上的装卸小车3对集装箱船舶2进行装卸作业。堆场7使用多个轨道吊联合负责堆场内集装箱的堆放或拆卸作业。其中靠近后水平轨道11设置的是具有外伸功能的特殊轨道吊12,使得该轨道吊的吊具能够对最近的后水平轨道11上的运输小车4进行直接装卸作业。远离后水平轨道11设置的是通用轨道吊13。在前水平轨道8与后水平轨道11之间布置的竖直轨道9的数量可由集装箱装卸桥和堆场数量确定。
35.水平轨道与竖直轨道9的相交处为旋转交接区,旋转交接区内设置有旋转交接模块10,旋转交接模块10在旋转交接区布置有一个可原地旋转的旋转圆盘14,旋转圆盘14与地面平齐,旋转圆盘14下方设置有旋转电机15,可以驱动旋转圆盘14实现原地旋转功能。旋转圆盘14上方设置有十字轨道2,分别与前水平轨道8、后水平轨道11、竖直轨道9密切相接。在旋转圆盘14上方设置有感应装置,当感应装置感应到旋转圆盘14上方有运输小车4停留时,感应装置向旋转电机15发出旋转信号,旋转电机15装置收到信号就带动旋转圆盘14自动旋转90度,旋转圆盘14上的十字轨道再次与后水平轨道11、竖直轨道9密切相接,运输小车4离开旋转交接区。
36.本发明还提供了一种利用自动化集装箱码头水平运输装置的水平运输方法,包括如下步骤:
37.s1、从码头前沿的集装箱装卸桥1将集装箱从船舶上吊起;
38.s2、将集装箱装卸桥1将吊起的集装箱放置到前水平轨道8上处于空闲状态的运输小车4上,集装箱摆放方向与前水平轨道8方向平行;
39.s3、在运输小车4装上集装箱后,沿前水平轨道8移动,到达最近前水平轨道8与竖直轨道9相交的旋转交接模块10;
40.s4、在旋转交接模块10带着运输小车4旋转90度后,与竖直轨道9相连在一起;
41.s5、在运输小车4离开旋转交接模块10后,沿着竖直轨道9移动,到达竖直轨道9与后水平轨道11相交的旋转交接模块10;
42.s6、旋转交接区带着运输小车4旋转90度后,与后水平轨道11相连;
43.s7、运输小车4沿着后水平轨道11移动,到达目标堆场7的轨道吊作业范围内;
44.s8、目标堆场7的轨道吊将运输小车4的集装箱吊起并放置于指定位置;当运输小车4指定的位置位于堆场7深处,则由多个轨道吊接力将集装箱放到指定位置。
45.s9、腾空了的运输小车4沿原路返回到集装箱装卸桥1下,等待下一次运输。
46.以上为卸船作业流程,装船作业流程与之相反。
47.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1