物体拆垛系统的制作方法
1.本实用新型涉及智能物流技术领域,具体涉及一种物体拆垛系统。
背景技术:
2.随着社会的高速发展,人们对物流的需求日益提高,其中,运输箱作为中小货物运输的载体,具有非常重要的地位。物流过程中的箱体根据物流环节的不同,需要不断进行拆垛。然而,现有的拆垛方式主要是人工拆垛,工作人员手动搬运物体,人工搬运不仅费时费力,而且成本过高,因此,需要一种能够高效准确的拆垛方案。
技术实现要素:
3.鉴于上述问题,提出了本实用新型以便提供一种克服上述问题或者至少部分地解决上述问题的物体拆垛系统。
4.根据本实用新型的一个方面,提供了一种物体拆垛系统,包括:第一3d相机、传送机构和设置于传送机构末端的第一夹具,其中,传送机构包括传送带;
5.第一3d相机,用于采集堆垛的垛型图像,其中,第一3d相机的拍摄方向朝向堆垛的侧面;
6.第一夹具,用于根据上位机发送的第一物体位姿信息抓取堆垛中的相应物体并将所抓取物体放置到传送带之上,其中,第一物体位姿信息是上位机对垛型图像分析处理确定的;
7.传送带,用于传输第一夹具所抓取的物体,其中,传送带处于运转状态。
8.进一步地,物体拆垛系统还包括:第二3d相机和设置于传送机构另一末端的第二夹具;
9.第二3d相机,用于采集传送带所传输物体的物体图像;
10.第二夹具用于:根据上位机发送的第二物体位姿信息抓取传送带上的物体并将物体码放置物料框中,其中,第二物体位姿信息是上位机对物体图像分析处理确定的。
11.进一步地,物体拆垛系统还包括:第二3d相机和具有托盘的码垛机器人,其中,码垛机器人位于传送机构的另一末端;
12.第二3d相机,用于采集传送带所传输物体的物体图像;
13.码垛机器人,用于根据上位机发送的第二物体位姿信息控制托盘承载传送带传输的物体并将物体码放置物料框中,其中,第二物体位姿信息是上位机对物体图像分析处理确定的。
14.进一步地,第一物体位姿信息包括:第一物体位置信息及第一物体姿态信息;
15.物体拆垛系统还包括:多个方向调节机构,用于根据上位机发送的调整方向及调整距离对传送机构进行调整,以使传送机构带动第一夹具移动至第一物体位置信息对应的抓取位置,其中,调整方向、调整距离是上位机根据第一物体位置信息确定的;
16.第一夹具进一步用于:形成第一物体姿态信息对应的抓取姿态抓取堆垛中的相应
物体。
17.进一步地,第一夹具为伸缩结构夹具。
18.进一步地,第一夹具包括:吸盘或夹爪;第二夹具包括:吸盘或夹爪。
19.进一步地,吸盘为海绵吸盘。
20.进一步地,堆垛由运输箱内已码放物体而形成。
21.进一步地,物体拆垛系统还包括:光源,用于对第一3d相机进行光照补偿。
22.进一步地,传送机构还包括壳体,传送带设置在壳体上;
23.第一3d相机设置在传送机构的壳体的下表面。
24.根据本实用新型提供的方案,通过设置于堆垛侧面的第一3d相机采集堆垛的垛型图像,第一夹具根据上位机发送的第一物体位姿信息抓取堆垛中的相应物体并将所抓取物体放置到传送带之上,其中,所述第一物体位姿信息是上位机对所述垛型图像分析处理确定的,从而实现了精准抓取堆垛中的物体,有效提升了运输箱内物体拆垛时的拆垛效率,利用处于运转状态的传送带传输所述第一夹具所抓取的物体,能够有效提升物体运输效率,节省时间且降低了成本。
25.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其它目的、特征和优点能够更明显易懂,以下特举本实用新型的具体实施方式。
附图说明
26.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本实用新型的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
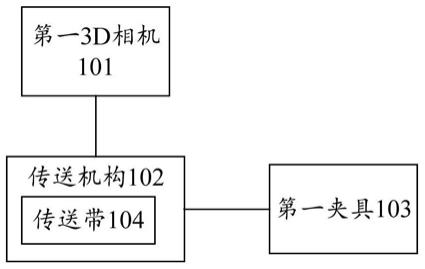
27.图1示出了根据本实用新型一个实施例的物体拆垛系统的结构框图;
28.图2示出了物体拆垛系统的实体结构示意图。
具体实施方式
29.下面将参照附图更详细地描述本实用新型的示例性实施例。虽然附图中显示了本实用新型的示例性实施例,然而应当理解,可以以各种形式实现本实用新型而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本实用新型,并且能够将本实用新型的范围完整的传达给本领域的技术人员。
30.图1示出了根据本实用新型一个实施例的物体拆垛系统的结构框图。如图1所示,该系统包括:第一3d相机101、传送机构102和设置于传送机构末端的第一夹具103,其中,传送机构102包括传送带104。
31.第一3d相机101,用于采集堆垛的垛型图像,其中,第一3d相机的拍摄方向朝向堆垛的侧面。
32.具体地,当存在物体拆垛需求时,可以利用第一3d相机采集堆垛的垛型图像,垛型图像反映了当前堆垛中物体码放状态,其中,垛型图像为rgb图像。
33.在本实施例中,第一3d相机设置在侧方位置,且第一3d相机的拍摄方向朝向堆垛的侧面,即,第一3d相机采集的是堆垛侧面的垛型图像,可选地,堆垛由运输箱内已码放物
体而形成,例如,集装箱或者箱货车内已码放物体所形成的堆垛,由于集装箱或者箱货车的车门通常设置在一侧,在拆垛时,通常打开侧门进行拆垛,因此,第一3d相机设置在侧方位置,能够更好地服务于拆垛。
34.第一夹具103,用于根据上位机发送的第一物体位姿信息抓取堆垛中的相应物体并将所抓取物体放置到传送带之上,其中,第一物体位姿信息是上位机对垛型图像分析处理确定的。
35.第一夹具设置于传送机构的末端,第一夹具用于抓取堆垛中的物体,可选地,第一夹具为伸缩结构夹具,在需要抓取物体时,可以向前伸出抓取堆垛中的相应物体;当需要将所抓取物体放置到传送带上时,可以向后缩回同时向下移动,以便于传送带带动物体移动,其中,第一夹具在将物体放置到传送带时,执行的向后缩回及向下动作后,第一夹具与传送带处于同一平面,从而能够不遮挡第一3d相机采集垛型图像。
36.可选地,第一夹具包括:吸盘或夹爪。当第一夹具为吸盘时,第一夹具的抓取方式为吸盘吸取,第一夹具启动后,吸盘内部处于真空状态,进而可以吸取相应的物体完成抓取操作;当第一夹具为夹爪时,夹具的抓取方式为夹爪抓取,第一夹具启动后,夹爪闭合,进而可以抓取物体完成抓取操作。更具体地,吸盘可以为海绵吸盘,其内置有真空发生器、单向阀和控制阀,即使物体没有完全被吸附也不影响其抓取效果,而且能够有效实现各种形状物体的吸取。优选地,第一夹具为吸盘。
37.上位机通过分析处理确定堆垛中各个物体的第一物体位姿信息后,决定本次要抓取哪个物体,并将物体对应的第一物体位姿信息发送给第一夹具,第一夹具在接收到上位机发送的第一物体位姿信息后,根据该第一物体位姿信息来抓取堆垛中的相应物体,需要说明的是,上位机可以利用现有技术中的分析方法来对垛型图像进行分析处理进而确定堆垛中各个物体的第一物体位姿信息,本实施例并不是保护上位机对垛型图像分析处理确定堆垛中各个物体的第一物体位姿信息的过程。其中,现有技术在分析确定第一物体位姿信息时,具体可以通过对垛型图像和深度图像进行处理,能够便捷地得到垛型图像对应的点云,利用点云分割技术,确定堆垛中各个物体对应的点云,点云包括各个3d点的位姿信息,通过将该物体对应的点云与预设模板点云进行匹配来确定该物体的第一物体位姿信息。此外,还可以根据激光探测器、led等可见光探测器、红外探测器以及雷达探测器等元件生成点云。
38.本实施例利用设置于传送机构末端的第一夹具来抓取堆垛中的相应物体,通过一次次的抓取堆垛中的物体来实现拆垛。
39.传送带104,用于传输第一夹具所抓取的物体,其中,传送带处于运转状态。
40.在本实施例中,第一夹具在抓取物体后,将物体放置到传送带上,这里的传送带一直处于运转状态,以便于及时传输第一夹具所抓取的物体。通过设置于传送机构末端的第一夹具抓取物体并通过传送机构中的传送带传输,实现了精准地拆垛及物体运输。
41.在本实用新型一种可选实施方式中,为了实现精准地码垛,物体拆垛系统还包括:第二3d相机和设置于传送机构另一末端的第二夹具(图中未示出);
42.第二3d相机,用于采集传送带所传输物体的物体图像;其中,第二3d相机可以设置在传送机构另一末端的上表面,第二3d相机设置在距离传送带另一末端的一定距离阈值处,第二3d相机拍摄方向朝下;第二3d相机所采集的物体图像为rgb图像。
43.第二夹具用于:根据上位机发送的第二物体位姿信息抓取传送带上的物体并将物体码放置物料框中,其中,第二物体位姿信息是上位机对物体图像分析处理确定的。
44.第二夹具设置于传送机构的另一末端,第二夹具用于抓取传送带上的物体,可选地,第二夹具包括:吸盘或夹爪。当第二夹具为吸盘时,第二夹具的抓取方式为吸盘吸取,第二夹具启动后,吸盘内部处于真空状态,进而可以吸取相应的物体完成抓取操作;当第二夹具为夹爪时,夹具的抓取方式为夹爪抓取,第二夹具启动后,夹爪闭合,进而可以抓取物体完成抓取操作。更具体地,吸盘可以为海绵吸盘,其内置有真空发生器、单向阀和控制阀,即使物体没有完全被吸附也不影响其抓取效果,而且能够有效实现各种形状物体的吸取。优选地,第二夹具为吸盘。
45.上位机通过对物体图像分析处理确定传送带上物体的第二物体位姿信息后,并将物体对应的第二物体位姿信息发送给第二夹具,第二夹具在接收到上位机发送的第二物体位姿信息后,根据该第二物体位姿信息来抓取传送带上的物体,并将所抓取的物体放置到物料框中,例如,第二夹具将所抓取的物体码放置笼车或托盘的相应位置。需要说明的是,上位机可以利用现有技术中的分析方法来对物体图像进行分析处理进而确定传送带上物体的第二物体位姿信息,本实施例并不是保护上位机对物体图像分析处理确定传送带上物体的第二物体位姿信息的过程。
46.在本实用新型一种可选实施方式中,物体拆垛系统还包括:第二3d相机和具有托盘的码垛机器人,其中,码垛机器人位于传送机构的另一末端;
47.第二3d相机,用于采集传送带所传输物体的物体图像;
48.码垛机器人,用于根据上位机发送的第二物体位姿信息控制托盘承载传送带传输的物体并将物体码放置物料框中,其中,第二物体位姿信息是上位机对物体图像分析处理确定的。
49.具体地,码垛机器人与传送机构是两个独立部件,码垛机器人位于传送机构的另一末端,码垛机器人带有托盘,上位机在确定了传送带所运输物体的第二物体位姿信息后,上位机将第二物体位姿信息发送给码垛机器人,码垛机器人根据第二物体位姿信息控制托盘移动至传送带相应位置以承载传送带传输的物体,并将所抓取的物体放置到物料框中,例如,第二夹具将所抓取的物体码放置笼车或托盘的相应位置。
50.在本实用新型一种可选实施方式中,第一物体位姿信息包括:第一物体位置信息及第一物体姿态信息;
51.物体拆垛系统还包括:多个方向调节机构,用于根据上位机发送的调整方向及调整距离对传送机构进行调整,以使传送机构带动第一夹具移动至第一物体位置信息对应的抓取位置,其中,调整方向、调整距离是上位机根据第一物体位置信息确定的;
52.第一夹具进一步用于:形成第一物体姿态信息对应的抓取姿态抓取堆垛中的相应物体。
53.具体地,每个物体都具有一定的尺寸,占据一定的体积,随着物体的抓取,堆垛会发生相应的变化,因此,在每次抓取完一个物体之后,为了能够继续抓取堆垛中的物体,需要移动传送机构,由于不同物体对应的第一物体位姿信息不同,其中,第一物体位姿信息包括:第一物体位置信息及第一物体姿态信息,第一物体位置信息反映了物体所在位置,第一物体姿态信息反映了物体朝向。因此,可以根据上位机可以根据第一物体位置信息确定多
个方向调节机构的调整方向和调整距离,并将调整方向和调整距离发送至多个方向调节机构,多个方向调节机构根据上位机发送的调整方向及调整距离对传送机构进行调整,以使传送机构带动第一夹具移动至第一物体位置信息对应的抓取位置,调整方向表示传送机构的移动方向,例如,向上或向下,和/或向左或向右。其中,上位机可以利用现有技术中的计算方法来根据第一物体位置信息确定多个方向调节机构的调整方向和调整距离,本实施例并不是保护调整方向和调整距离的确定过程。
54.物体姿态信息反映了物体的一个朝向,为了能够有效稳定的抓取,第一夹具需要形成第一物体姿态信息对应的抓取姿态以抓取堆垛中的相应物体。
55.在本实用新型一种可选实施方式中,随着堆垛中物体被抓取,将逐渐剩余运输箱内部的物体,然而,运输箱内部光线较差,为了使第一3d相机能够采集到清晰的垛型图像,需要在第一3d相机采集垛型图像时,对第一3d相机进行光照补偿,因此,物体拆垛系统还包括:光源,该光源用于对第一3d相机进行光照补偿,其中,光源可以设置在第一3d相机的下方。
56.在本实用新型一种可选实施方式中,所述传送机构还包括壳体,所述传送带设置在壳体上,为了保证传送带的正常运转,传送带的下表面与壳体底部的上表面之间有一定距离;所述第一3d相机设置在所述传送机构的壳体的下表面。传送带处于运转状态时,第一3d相机并不会随着传送带而移动。
57.图2示出了物体拆垛系统的实体结构示意图,该实体结构是物体拆垛系统是一种实现方式,需要强调的是,物体拆垛系统并不限于图2所示实体结构。如图2所示,第一3d相机101固定设置在传送机构102的壳体的下表面,可选地,第一3d相机与传送机构还可以是两个独立部件,第一3d相机设置在传送机构的下方,第一3d相机的位置可以根据拍摄需要进行调整,优选地,第一3d相机固定设置在传送机构102的壳体的下表面。其中,若第一3d相机固定设置在传送机构的下表面,第一3d相机的设置位置需要保证第一3d相机的视野能够拍摄整个堆垛,由于传送机构比较长,为了能够保证第一3d相机采集的垛型图像的成像效果,拍照位置大概是第一3d相机距离堆垛的一个距离阈值内,如果拍照位置太远会造成成像效果不好,例如,第一3d相机设置在离堆垛4m-4.5m位置处,当第一3d相机固定设置在传送机构的下表面时,第一3d相机设置在离设置有第一夹具的传送机构末端4m-4.5m范围内任一位置处,例如,4m位置处,随着堆垛中物体被抓取,传送机构末端会随之发生移动,从而保证第一3d相机与堆垛间距离保持4m,例如,传送机构可以深入到运输箱内部,比如,向运输箱内部深入3m,这里仅是举例说明,不具备限定作用。在图2中,传送机构设置在agv车上,agv车可以根据实际需要进行移动。
58.设置于传送机构末端的第一夹具103根据上位机发送的第一物体位姿信息抓取堆垛中的相应物体并将所抓取物体放置到传送带之上,传送带104传输所述第一夹具所抓取的物体,其中,所述传送带处于运转状态。
59.根据本实用新型上述实施例提供的系统,通过设置于堆垛侧面的第一3d相机采集堆垛的垛型图像,第一夹具根据上位机发送的第一物体位姿信息抓取堆垛中的相应物体并将所抓取物体放置到传送带之上,其中,所述第一物体位姿信息是上位机对所述垛型图像分析处理确定的,从而实现了精准抓取堆垛中的物体,有效提升了运输箱内物体拆垛时的拆垛效率,利用处于运转状态的传送带传输所述第一夹具所抓取的物体,能够有效提升物
体运输效率,节省时间且降低了成本。
60.本实用新型中所提到的各种模块、电路均为由硬件实现的电路,虽然其中某些模块、电路集成了软件,但本实用新型所要保护的是集成软件对应的功能的硬件电路,而不仅仅是软件本身。
61.本领域技术人员应该理解,附图或实施例中所示的装置结构仅仅是示意性的,表示逻辑结构。其中作为分离部件显示的模块可能是或者可能不是物理上分开的,作为模块显示的部件可能是或者可能不是物理模块。
62.最后,需要注意的是:以上列举的仅是本实用新型的具体实施例子,当然本领域的技术人员可以对本实用新型进行改动和变型,倘若这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,均应认为是本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1