一种巷道式单立柱堆垛机及仓库的制作方法
1.本实用新型涉及堆垛机技术领域,具体涉及一种巷道式单立柱堆垛机及仓库。
背景技术:
2.随着社会的进步,生产力的发展,新的市场对物业物流系统提出了越来越高的要求,一方面对仓储能力要求增大,仓库已从单层库房向多层库房发展的同时,仓库巷道之间的间距也希望能尽可能地压缩,而且,另一方面,对仓库出入货及存储和取出货品的自动化程度要求不断提高。因而自动化立体仓库及物流系统越来越受到人们的关注,并得到广泛运用。堆垛机是自动化立体仓库中最关键的搬运和起重设备之一,在不需要人工干预的情况下,它能够在自动化立体仓库的巷道中来回穿梭运行,并自动从货架存储和取出物料。
3.堆垛机一般包括行走机构、升降机构、货叉机构,且按其结构可以分为单柱式堆垛机和双柱式堆垛机两种。双立柱堆垛机占用体积大,不适用于小型或轻型的立体仓库(这种立体仓库的巷道一般较窄,存放的物品较轻);单立柱堆垛机因其结构布局较简单、动作灵活,多用于小型或轻型的立体仓库。现有技术中,单立柱堆垛机的升降机构多采用马达加钢丝绳牵引或马达加同步轮同步带牵引,如cn111559723a中的单立柱堆垛机的升降机构中,采用的是同步轮和同步带牵引升降货叉机构。但无论是钢丝绳牵引还是同步轮同步带牵引,对小型或轻型立体仓库,会造成一定的浪费;另外,两者的定位精度都不够高,货叉机构与升降机构连接处设计复杂,而且整体结构不够紧凑,维护成本高。
技术实现要素:
4.因此,本实用新型要解决的技术问题在于克服现有技术中小型或轻型仓库中使用的堆垛机结构不紧凑、定位精度不够高、维护成本较高的缺陷,从而提供一种巷道式单立柱堆垛机。
5.本实用新型提供的巷道式单立柱堆垛机的技术方案为:
6.一种巷道式单立柱堆垛机,包括行走机构、升降机构和货叉机构,其中:
7.所述升降机构包括立柱、升降电机、齿轮和齿条;所述立柱固定安装于所述行走机构上;所述齿条位于所述立柱的一个侧面;所述齿轮与所述齿条啮合,且所述齿轮与所述升降电机的驱动轴可拆卸地安装,所述齿轮在所述升降电机的驱动下沿着所述齿条上下运动;
8.所述货叉机构包括伸缩插板、伸缩电机和具有内部容纳空间的载物台;所述货叉机构通过导轨滑块安装所于述升降机构的立柱上;所述升降电机和所述齿轮安装于所述载物台内部。
9.优选地,上述堆垛机中,所述齿轮为斜齿轮,所述齿条为斜齿条。
10.优选地,上述堆垛机中,所述升降电机为抱闸电机。
11.另外,上述堆垛机中,所述货叉机构的载物台与所述导轨滑块可拆卸地连接;所述伸缩插板位于所述载物台上面,所述伸缩电机位于所述载物台内部;所述伸缩插板在所述
伸缩电机的驱动下可以在水平方向上向左或右移动。
12.特别地,上述堆垛机中,所述行走机构包括行走主体、行走电机、地轨、滚轮、第一导轮和第二导轮;所述滚轮位于所述行走主体的内部,所述行走电机位于所述行走主体的侧面,驱动所述滚轮在所述地轨上运动;所述第一导轮和第二导轮分别位于所述行走主体移动方向上的前后两端。
13.优选地,上述堆垛机中,所述第一和第二导轮均具有左右两个子轮,所述左右子轮分别位于所述地轨的两侧。
14.特别地,上述堆垛机中,所述地轨的两个端点处设置有缓冲装置。
15.特别地,上述堆垛机中,所述行走机构还包括天轨;所述升降机构的立柱顶端设置有第三导轮,所述第三导轮具有左右两个子轮,所述两个左右子轮分别位于所述天轨的两侧。
16.优选地,上述堆垛机中,所述立柱上任一非齿条所在的侧面设置有柔性装置,所述柔性装置用于收纳电缆线。
17.优选地,上述堆垛机还包括电气控制柜,用于放置电气元器件,控制所述升降电机、伸缩电机、行走电机的运动。
18.本实用新型提供的堆垛机,具有如下优点:
19.1.用齿轮齿条代替现有技术中钢丝绳或同步带同步轮牵引,结构设计更加紧凑,便于优化货叉机构与升降机构的安装设计,而且更加适用于小型或轻型立体仓库;另一方面,齿轮齿条定位精度更高。采用抱闸电机作为升降机构的驱动电机,当到达指定高度时停止抱闸电机运动,可以立马停止在指定高度,消除齿轮运动的惯性,从而进一步提高定位精度。
20.2.货叉机构通过导轨滑块安装于升降机构的立柱上,一来安装结构简单,维护成本低;二来,当货叉机构装载的物品较重时,可以放置货叉机构向物品放置方向倾倒。
21.3.行走机构的第一第二导向轮和/或升降机构的立柱上的第三导向轮设置,可以防止堆垛机发生侧翻。
22.另一方面,为了适应现代物流对轻型货物的自动化存储的需求,本实用新型提供了一种仓库。
23.本实用新型提供的仓库的技术方案为:
24.一种仓库,包括立体货架、堆垛机、上料输送装置和下料输送装置,其中,所述堆垛机构为上述堆垛机构,所述堆垛机位于所述立体货架的巷道内。
25.本使用新型提供的立体仓库,可自动实现物品的存、取,而且占用空间小。由于该立体仓库采用了上诉的堆垛机构,因此,也具有上述堆垛机构的任一项优点。
附图说明
26.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
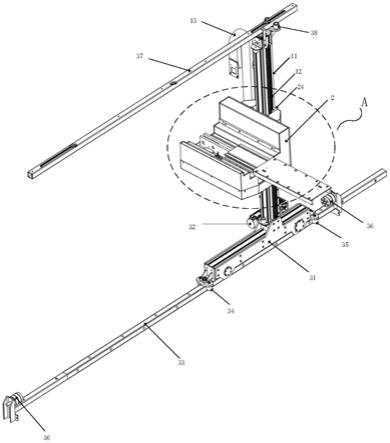
27.图1为本实用新型实施例中提供的堆垛机的立体结构示意图;
28.图2为图1中a区域中的货叉机构的立体结构示意图;
29.图3为图1中a区域中的升降机构的立体结构示意图;
30.图4为图1的俯视图;
31.图5为本实用新型实施例中提供的货叉机构的立体结构示意图。
32.附图标记说明:
33.11-立柱;12-齿条;13-柔性件;14-齿轮;15-升降电机;
34.2-货叉机构;21-伸缩插板;22-伸缩电机;23-载物台;24-导轨滑块;
35.31-行走主体;32-行走电机;33-地轨;34-第一导轮;35-第二导轮; 36-缓冲装置;37-天轨;38-第三导轮;3901-主动滚轮;3902-从动滚轮。
具体实施方式
36.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
37.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
38.此外,下面所描述的本实用新型不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
39.实施例1
40.图1-5为本实用新型提供的堆垛机的一种优选实施例。其中,图1为堆垛机的立体机构示意图,图2、3分别为图1中a部分的货叉机构和升降机构的立体结构示意图,图4为图1的俯视图。本实用新型提供的一种巷道式堆垛机,包括行走机构、升降机构和货叉机构2。其中,升降机构包括立柱11,升降电机15,齿条12,齿轮14。齿条12位于立柱非行走方向的一个侧面,齿轮14与齿条12啮合,且齿轮14与升降电机15的驱动轴可拆卸地安装;升降电机15带动齿轮15沿着齿条12上下运动。
41.货叉机构2包括伸缩插板21,伸缩电机22(见图4),载物台23。其中,伸缩插板21放置在载物台23上,载物台23具有内部容纳空间,用以容纳伸缩电机22。伸缩插板21在伸缩电机22的带动下,可以在水平方向上向左或向右移动,当堆垛机位于立体仓库的巷道内时,可以存、取左右两边的货品。同时,升降机构的升降电机15和齿轮14也安装于载物台的容纳空间内。另外,载物台23具有沿着行走方向并指向立柱11凸出的两条肋,这两条肋用于和导轨滑块24固定,固定方式可采用螺栓螺丝固定。导轨滑块24安装在立柱11上。实际使用中,齿轮14在升降电机15的带动下沿着齿条12上下运动,从而带动载物台23、伸缩插板21和导轨滑块 24沿着立柱的垂直方向运动。本实施例中,采用齿轮齿条啮合运动,定位精度明显高于钢丝绳或同步带的牵引运动;而且整体设计更加简单,结构更加紧凑。
42.优选地,升降电机15采用抱闸电机,当伸缩插板21到达指定高度时,由于抱闸作用
消除了惯性影响,升降电机15立马停止转动,齿轮14也立马停止转动,从而进一步提高了定位精度。
43.优选地,齿条12采用斜齿条,齿轮14采用斜齿轮。由于斜齿轮和斜齿条是逐渐进入啮合过程,减少了传动冲击、震动和噪声,提高了传动平稳性,增大了传动速度;另外,斜齿轮和斜齿条在水平和垂直方向上均能承受外力,从而增大了货叉机构2对重物的承载能力。
44.另一方面,载物台23通过导轨滑块24安装于立柱11上,精简了载物台的设计,降低了维修成本。同时,由于导轨滑块24至少有3个面与立柱 11接触,限制了货叉机构2在其他方向运动的可能性,使得货叉机构2只能沿着立柱上下运动。再者,若货叉机构2承载的物品比较重有发生前倾的可能性时,导轨滑块24会受到来自立柱11的反作用力,从而防止货叉机构2的前倾。
45.行走机构包括行走主体31,行走电机32,地轨33,主动滚轮3901,从动滚轮3902。立柱11固定安装于行走主体31上,固定方式可选焊接固定、螺栓固定的一种或两种组合。行走电机32位于行走主体31的侧边,主动滚轮3901和从动滚轮3902位于行走主体31的内部。行走电机32的转动轴与主动滚轮3901可拆卸地安装,带动主动滚轮3901在地轨33上滚动,从而带动行走主体31在地轨33上前后移动。在行走主体31移动方向的前后两端,分别设置第一导轮34和第二导轮35。第一导轮34和第二导轮35均具有左右两个子轮,左右子轮分别位于地轨33的左右两侧,引导着行走主体31沿着地轨33移动。另外,地轨的两端分别设有缓冲装置36,防止行走主体31与地轨31的端部相撞。另外,为了放置行走主体31和立柱11发生侧翻,行走机构还包括天轨37,立柱11的顶端设置有第三导轮 38。第三导轮38也具有左右两个子轮,左右子轮分别位于天轨37的左右两侧。
46.另外,为了便于排布和收纳电源线,在立柱11的任一非行走方向侧边,设置有柔性装置13,使得堆垛机的外观更加简洁美观。行走主体31的后边设置有电气控制柜(图中未示出)。电气控制柜用于放置电气元器件,从而控制升降电机15、伸缩电机22、行走电机32的运动。
47.实施例2
48.本实施例提供一种立体仓库,包括实施例1所述的堆垛机、立体货架、进料输送装置和下料输送装置。堆垛机位于立体货架的巷道内,进料输送装置和下料输送装置位于立体货架的同侧或对侧。存物品时,物品通过进料输送装置运送到进料口,堆垛机的伸缩插板叉取该物品,然后通过行走主体31在地轨33上前后移动,货叉机构2在立柱11上上下移动,将该物品放置到指定的存储货架上。取物品时,堆垛机的行走主体31和货叉机构 2移动到指定位置,叉取所需物品;再移动堆垛机至下料输送装置处,将该物品放置在下料输送装置上,完成取物品操作。
49.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本实用新型创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1