一种电磁起重小车控制系统
1.本发明涉及一种电磁起重小车控制系统,属于电磁起重技术领域。
背景技术:
2.电磁起重机是利用电磁原理搬运钢铁物品的机器,接通电流,电磁铁便把钢铁物品牢牢吸住,吊运到指定的地方;切断电流,磁性消失,钢铁物品就被放下来,电磁起重机使用十分方便,可在多种工业领域应用;我国大多数电磁起重装置应用在废钢铁回收部门和炼钢车间等,电磁起重机能产生强大的磁场力,几十吨重的铁片、铁丝、铁钉、废铁和其他各种铁料,不装箱不打包也不用捆扎,就能很方便地收集和搬运,不但操作省力,而且简化了工人的工作。但目前的电磁起重机体积过大,无法在一些小型场地进行电磁起重工作,应用范围比较狭窄,也无法根据使用者的需求进行灵活移动,工作方式比较固定。因此,市场上需求一种体积小、轻巧灵活的电磁起重装置。
技术实现要素:
3.本发明的目的在于提供一种电磁起重小车控制系统以来解决改善上述传统电磁起重装置体积过大、无法灵活移动、应用范围狭窄的问题。
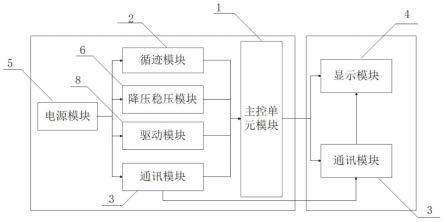
4.本发明采取的技术方案如下:一种电磁起重小车控制系统,由车身控制系统和外部显示系统组成,所述小车控制系统包括主控单元模块(1)、循迹模块(2)、通讯模块(3)、显示模块(4)、电源模块(5)、降压稳压模块(6)、驱动模块(7),所述外部显示系统包括控制模块(8)、通讯模块(3)、显示模块(4)、电源模块(5),电磁起重小车外部显示系统通过蓝牙无线通讯与车身控制系统互联。
5.进一步地,所述主控单元模块(1)型号为arduino mega 2560。
6.进一步地,所述循迹模块(2)为trct-5000l循迹模块,通过ttl串口p35、p36、p37、p38、p39与主控单元模块(1)相连接,规定电磁起重小车的行进路线。
7.进一步地,所述通讯模块(3)包括bt06蓝牙模块和qc80扫码模块,所述扫码模块通过串口rx1、tx1与主控单元模块(1)相连,小车到指定位置扫描二维码信息进行下一步操作,所述蓝牙模块通过串口rx1、tx1与主控单元模块(1)相连,与外部显示系统建立蓝牙无线通讯互联,把扫码识别的信息无线传输到主控单元模块(1)上。
8.进一步地,所述显示模块(4)为lcd1206a显示模块,通过ttl串口rs、e、d4、d5、d6、d7与主控单元模块相连,并与外部显示系统的显示模块(4)同步显示扫码识别的信息。
9.进一步地,所述电源模块(5)为12v充电式jx154262p锂电池组,保证电磁起重小车供电系统的稳定性。
10.进一步地,所述降压稳压模块(6)为lm2596降压稳压模块,通过接口in、out控制输出电压的稳定性,使小车稳定运行。
11.进一步地,所述驱动模块(7)由步进电机、180舵机、360舵机和l298n驱动模块组成,所述步进电机驱动小车的运行,所述180舵机控制电磁铁的起落,所述l298驱动模块通
过串口in、out驱动模块运行。
12.进一步地,所述控制模块(8)的型号为arduino nano。
13.本发明实施的有益效果是,改善原本电磁起重机体积大、操作笨重的缺陷,将电磁起重与小车相融合,使其体积小巧、运行灵活,适用于各种工作场合,将电磁起重装置应用到更为广泛的领域中去。
附图说明
14.图1为本发明实施例中电磁起重小车控制系统车身控制系统模块组成图;
15.图2为本发明实施例中电磁起重小车控制系统外部显示系统模块组成图;
16.图3为本发明实施例中电磁起重小车控制系统控制模块电路原理图;
17.图4为本发明实施例中电磁起重小车控制系统蓝牙模块电路原理图;
18.图5为本发明实施例中电磁起重小车控制系统主控单元模块电路图;
19.图6为本发明实施例中电磁起重小车控制系统扫码模块电路原理图;
20.图7为本发明实施例中电磁起重小车控制系统驱动模块电路原理图,其中左侧为步进电机驱动及步进电机电路图;中间为主控单元电路原理图;右上侧为180舵机原理图,右下侧为360舵机原理图;
21.图8为本发明实施例中电磁起重小车控制系统整体电路原理图;
具体实施方式
22.下面结合附图对本发明做进一步详细说明。结合图1、图2、图3、图4、图5、图6、图7、图8,所述小车控制系统包括主控单元模块(1)、循迹模块(2)、通讯模块(3)、显示模块(4)、电源模块(5)、降压稳压模块(6)、驱动模块(7),所述外部显示系统包括控制模块(8)、通讯模块(3)、显示模块(4)、电源模块(5),电磁起重小车外部显示系统通过蓝牙无线通讯与车身控制系统互联。
23.进一步地,所述主控单元模块(1)型号为arduino mega 2560,控制各部分模块进行工作。
24.进一步地,所述循迹模块(2)为trct-5000l循迹模块,通过ttl串口p35、p36、p37、p38、p39与主控单元模块(1)相连接,规定电磁起重小车的行进路线,使小车在规定的区域内按照规定路线行驶。
25.进一步地,所述通讯模块(3)包括bt06蓝牙模块和qc80扫码模块,所述扫码模块通过串口rx2、tx2与主控单元模块(1)相连,小车到指定位置扫描二维码信息,将二维码信息上传到单片机后,根据单片机的指示来确定小车的下一步工作;所述蓝牙模块通过串口rx1、tx1与主控单元模块(1)相连,通过串口tx1、rx0与控制模块(8)相连,与外部显示系统建立蓝牙无线通讯互联,把扫码识别的信息通过建立的蓝牙无线传输链接传输到外部显示系统的控制模块(8)。
26.进一步地,所述显示模块(4)为lcd1206a显示模块,通过ttl串口rs、e、d4、d5、d6、d7与主控单元模块相连,将扫码识别的信息显示在显示模块(4)上,并且通过蓝牙建立的无线传输链接与外部显示系统的显示模块(4)同步显示扫码识别的信息。
27.进一步地,所述电源模块(5)为12v充电式jx154262p锂电池组,保证电磁起重小车
供电系统的稳定性。
28.进一步地,所述降压稳压模块(6)为lm2596降压稳压模块,通过接口in、out控制输出电压的稳定性,使小车稳定运行。
29.进一步地,根据权利要求1所述的一种电磁起重小车控制系统,其特征在于:所述驱动模块(7)由步进电机、180舵机、360舵机和l298n驱动模块组成,所述步进电机驱动小车的运行,所述180舵机控制电磁铁在x轴、y轴方向的左右移动,所述360舵机控制电磁铁z轴方向的上下起落,所述l298n驱动模块通过串口in、out与步进电机的正负极连接,通过串口22、23、24、25、26、27、28、29、30、31、32、33与主控单元模块(1)相连,分别控制小车在前右、前左、后左、后右方向的步进电机进行正反转,进而实现小车的前后左右移动。
30.进一步地,所述控制模块(8)的型号为arduino nano,控制外部显示系统中各部分模块的运行,并通过蓝牙无线通讯的方式与车身控制系统建立无线传输链接,同步车身的显示模块(4)所显示的信息。
31.系统通过主控单元模块(1)的arduino mega 2560单片机控制通讯模块(3)中的qc80扫码模块对二维码进行扫描,电磁起重通过扫码识别到的信息根据到达指定的位置进行起重工作,通过主控单元模块(1)的arduino mega 2560单片机产生脉冲信号来控制步进电机的正、反转,电磁起重小车通过降压稳压模块(6)实现车身内部电压的稳定输出,小车通过循迹模块(2)根据规定的路线行走,当小车需要进行起重工作和放货工作时,根据循迹路线寻找固定的起重、放货位置,完成电磁起重小车的正常工作,车身控制系统与外部显示系统通过通讯模块(3)的蓝牙模块建立蓝牙无线传输链接,将扫码模块识别到的信息传递给主控单元模块(1)后,通过蓝牙链接共享给外部显示系统,保证扫码获得的信息能够分别显示在两个显示模块(4)上,确保信息的时效性。
32.本发明将循迹模块(2)、扫码模块(7)、显示模块(4)等模块整合为一个电磁起重小车控制系统,相比于传统的电磁起重装置,电磁起重小车通过循迹路线的规划使得工作范围更加灵活、运动更加准确,通过二维码扫描的方式来决定工作的开始和结束,通过两端显示屏信息共享的方法实时监控小车的工作进度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1