一种复用手术器械包装系统的制作方法
1.本发明涉及手术器械包装技术领域,尤其涉及一种复用手术器械包装系统。
背景技术:
2.伴随着医疗技术的不断发展,手术器械的种类以及功能也越来越丰富。手术器械通常包括一次性手术器械及重复性手术器械,其中重复性手术器械按照《医院消毒供应中心管理规范》需要统一回收并按照回收、分类、清洗、消毒、检查、保养、包装、灭菌、储存、无菌物品发放的流程进行处理。
3.回收及处理流程中所涉及的对重复性手术器械的包装过程大多采用手工操作。该操作方式容易出现包装不良的现象,同时也容易导致医护人员受伤等情况的发生,进而无法保证包装过程的高效性以及安全性。
技术实现要素:
4.本发明所要解决的技术问题是克服现有技术中存在的不足,提供一种复用手术器械包装系统。
5.本发明是通过以下技术方案予以实现:一种复用手术器械包装系统,包括:
6.工作台;
7.纱布切割机构,纱布切割机构固定于工作台的后侧;
8.胶带切割机构,胶带切割机构固定于工作台的一侧;
9.传送机构,传送机构固定于工作台的前侧;
10.机械臂结构,机械臂结构包括固定于纱布切割机构与传送机构之间的第一机械臂及第二机械臂,第一机械臂末端可拆卸连接有第一夹取部,第二机械臂末端设有第二夹取部;
11.第三夹取部,第三夹取部设置于工作台的一侧,与第一机械臂可拆卸连接;
12.器械框,器械框设置于工作台顶部,于第一机械臂与第二机械臂之间。
13.进一步地,传送机构包括上料机构、下料机构;
14.上料机构与下料机构之间设有间隙,间隙两侧分别设有上料位及下料位。
15.进一步地,第一夹取部包括第一支臂模块、第一夹取底座、第一对夹夹爪以及戳板;
16.其中第一支臂模块的一端与第一机械臂固定连接,第一支臂模块的另一端与第一夹取底座顶部固定连接,夹取底座底部与戳板固定连接;
17.第一夹取底座内部设有第一气爪,第一气爪通过第一夹取底座侧部的豁口与第一对夹夹爪固定连接。
18.进一步地,第二夹取部包括第二支臂模块、第二夹取底座以及第二对夹夹爪;
19.其中第二支臂模块的一端与第二机械臂固定连接,第二支臂模块的另一端与第二夹取底座固定连接,第二夹取底座内部设有第二气爪,第二气爪通过第二夹取底座侧部的
豁口与第二对夹夹爪固定连接;
20.第二气爪包括第一夹板及第二夹板,第一夹板固定于第二夹取底座的底部,第二夹板通过旋转轴与第二气爪固定连接。
21.进一步地,第三夹取部包括支架、固定于支架顶部胶带粘吸模块以及固定于支架底部的夹持模块;
22.胶带粘吸模块包括与支架顶部固定连接的支撑板,固定于支撑板两侧的吸气板、固定于吸气板之间的活动吸气板;活动吸气板与支撑板之间通过弹簧及直线轴承固定连接;
23.夹持模块包括与支架底部固定连接的第三气爪,以及固定于第三气爪两侧的第三夹板。
24.进一步地,还包括快换盘;
25.第一机械臂与快换盘的主侧固定连接,第一夹取部和/或第三夹取部与快换盘的工具侧固定连接。
26.进一步地,工作台顶部设置有至少两个导向挡块以及至少两个活动挡块。
27.本发明的有益效果是:本技术所提供的一种复用手术器械包装系统,机械臂结构对器械框进行夹取并放置于工作台,利用纱布切割机构对纱布进行裁切,之后通过第一夹取部、第二夹取部以及第三夹取部对器械框进行包裹,并利用胶带切割机构所切割的胶带进行粘贴,完成后利用机械臂结构放回传送机构,从而避免了医护人员手工操作所可能带来的损伤,同时提高了包装的效率。
附图说明
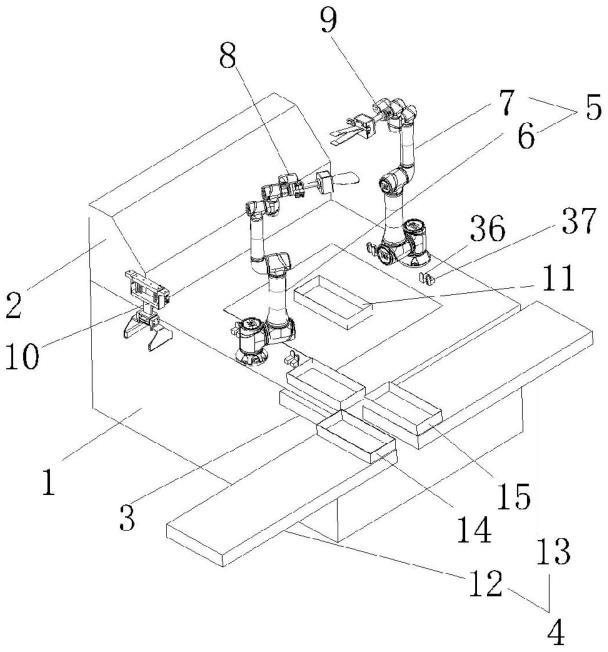
28.图1是本发明所提供的一种复用手术器械包装系统的结构示意图。
29.图2是本发明所提供的一种复用手术器械包装系统中第一夹取部的结构示意图。
30.图3是本发明所提供的一种复用手术器械包装系统中第二夹取部的结构示意图。
31.图4是本发明所提供的一种复用手术器械包装系统中第三夹取部的结构示意图。
32.图中:1、工作台;2、纱布切割机构;3、胶带切割机构;4、传送机构;5、机械臂结构;6、第一机械臂;7、第二机械臂;8、第一夹取部;9、第二夹取部;10、第三夹取部;11、器械框;12、上料机构;13、下料机构;14、上料位;15、下料位;16、第一支臂模块;17、第一夹取底座;18、戳板;19、第一气爪;20、第一对夹夹爪;21、第二支臂模块;22、第二夹取底座;23、第二对夹夹爪;24、第二夹板;25、支架;26、胶带粘吸模块;27、夹持模块;28、支撑板;29、吸气板;30、活动吸气板;31、弹簧;32直线轴承;33、第三气爪;34、第三夹板;35、快换盘;36、导向挡块;37、活动挡块;38、第二气爪;39、第一夹板。
具体实施方式
33.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.现阶段对于重复性手术器械的回收主要采用手工操作进行包装等操作,但是在包
装的过程中极易出现以下的问题:1、人为包装容易出现包装不良的现象进而影响手术器械的灭菌效果;2、某些手术器械质量较重、某些手术器械具有针刺形结构,容易对工作人员造成安全隐患。针对上述不足,本技术提供了一种复用手术器械包装系统。
35.实施例一
36.如图1所示,一种复用手术器械包装系统,包括:
37.工作台1;
38.纱布切割机构2,纱布切割机构2固定于工作台1的后侧;这里所涉及的纱布通常指无纺布。
39.胶带切割机构3,胶带切割机构3固定于工作台1的一侧;
40.传送机构4,传送机构4固定于工作台1的前侧;传送机构4优选采用传送带,将手术器械放置于传送带的器械框11中。
41.机械臂结构5,机械臂结构5包括固定于纱布切割机构2与传送机构4之间的第一机械臂6及第二机械臂7,第一机械臂6末端可拆卸连接有第一夹取部8,第二机械臂7末端设有第二夹取部9;一种优选的实施方式中,上述胶带切割机构3设置于第一机械臂6的同侧,便于使第一机械臂6对胶带进行拾取。
42.第三夹取部10,第三夹取部10设置于工作台1的一侧,与第一机械臂6可拆卸连接;这里需要说明的是,第三夹取部10放置于凸台上,并且通过其底部的夹持模块27的间隙实现与凸台的稳定固定。上述凸台与工作台1固定连接。
43.器械框11,器械框11设置于工作台1顶部,于第一机械臂6与第二机械臂7之间。上述器械框11在包装过程中被放置于工作台1中心的工作区。
44.本技术所提供的一种复用手术器械包装系统,机械臂结构对器械框进行夹取并放置于工作台,利用纱布切割机构对纱布进行裁切,之后通过第一夹取部、第二夹取部以及第三夹取部对器械框进行包裹,并利用胶带切割机构所切割的胶带进行粘贴,完成后利用机械臂结构放回传送机构,从而避免了医护人员手工操作所可能带来的损伤,同时提高了包装的效率。
45.实施例二
46.在实施例一的基础上,进一步如图2至图4所示,上述传送机构4包括:上料机构12、下料机构13;
47.上料机构12与下料机构13之间设有间隙,间隙两侧分别设有上料位14及下料位15。待包装的器械框11通过上料位14被第一机械臂6提取至工作区。包装完成的器械框11通过第一机械臂6被放置于下料位15。其中,工作台1于间隙处设置有器械框暂存位,用于第一机械臂6将包装好的器械框11放置于器械框暂存位。
48.第一夹取部8包括第一支臂模块16、第一夹取底座17、第一对夹夹爪20以及戳板18;
49.其中第一支臂模块16的一端与第一机械臂6固定连接,第一支臂模块16的另一端与第一夹取底座17顶部固定连接,第一夹取底座17底部与戳板18固定连接;
50.第一夹取底座17内部设有第一气爪19,第一气爪19通过第一夹取底座17侧部的豁口与第一对夹夹爪20固定连接。
51.进而上述第一夹取部8的工作过程如下:当需要夹取无纺布时,第一气爪19打开,
第一机械臂6带动第一夹取部8移动至纱布切割机构2;第一对夹夹爪20夹住无纺布,并使第一机械臂6带动无纺布至待包装区域;当需要戳无纺布时,通过戳板18戳无纺布进行使其发生折叠。
52.进一步地,第二夹取部9包括第二支臂模块21、第二夹取底座22以及第二对夹夹爪23;
53.其中第二支臂模块21的一端与第二机械臂7固定连接,第二支臂模块21的另一端与第二夹取底座22固定连接,第二夹取底座22内部设有第二气爪38,第二气爪38通过第二夹取底座22侧部的豁口与第二对夹夹爪23固定连接;
54.第二气爪38包括第一夹板39及第二夹板24,第一夹板34固定于第二夹取底座22的底部,第二夹板24通过旋转轴与第二气爪38固定连接。
55.其中第二对夹夹爪23在第一对夹夹爪20对无纺布进行夹取的过程中实现同步夹取。同时在戳板18完成对无纺布进行对折的操作后,第一夹板34及第二夹板24通过合拢从而实现对无纺布夹紧,并在第二机械臂7的作用下移动至指定位置。
56.进一步地,第三夹取部10包括支架25、固定于支架25顶部胶带胶带粘吸模块26以及固定于支架25底部的夹持模块27;
57.胶带粘吸模块26包括与支架25顶部固定连接的支撑板28,固定于支撑板28两侧的吸气板29、固定于吸气板29之间的活动吸气板30;活动吸气板30与支撑板28之间通过弹簧31及直线轴承固定连接;
58.夹持模块27包括与支架25底部固定连接的第三气爪33,以及固定于第三气爪33两侧的第三夹板34。
59.这里需要补充的是,第一机械臂6不但需要完成夹取无纺布的操作,同时也需要完成对器械框11的夹取。其具体操作过程如下:
60.第一机械臂6通过第一夹取部8与第三夹取部10的可拆卸连接而与第三夹取部10进行固定;之后利用第三气爪33驱动第三夹板34对夹紧器械框11并移动至指定位置。
61.上述胶带粘吸模块26所属的吸气板29以及活动吸气板30与外部真空发生器连接,作用在于:当胶带切割机构3完成对胶带的切割之后,利用吸气板29以及活动吸气板30从胶带背面进行吸取,并在到达无纺布的位置后通过弹簧31以及直线轴承使胶带贴合于无纺布。
62.进一步地,第一机械臂6与快换盘35的主侧固定连接,第三夹取部10与快换盘35的工具侧固定连接。上述快换盘35能够实现第一机械臂6与第三夹取部10的锁紧与松开,从而实现两者的可拆卸连接。这里需要补充的是,上述第一夹取部8配置有快换盘35的工具侧,从而同样实现与第一机械臂6的可拆卸连接。
63.进一步地,工作台1顶部设置有至少两个导向挡块36以及至少两个活动挡块37。上述导向挡块36以及活动挡块37分别设置于器械框11的四周,用以在第一机械臂6与第二机械臂7之一进行操作的过程中对无纺布的两侧进行限位。
64.具体的,上述复用手术器械包装系统的工作过程如下:
65.上料机构12将带有手术器械的器械框11移动至上料位14;
66.第一机械臂6通过第一夹取部8、第二机械臂7通过第二夹取部9将无纺布拉拽至尺寸约为1米
×
1米时,由纱布切割机构2对纱布进行切割;
67.第一机械臂6以及第二机械臂7将切割完成的无纺布放置于工作区后,第一机械臂6通过快换盘35实现与第一夹取部8的分离并更换为第三夹取部10;
68.第一机械臂6利用第三夹取部10将位于上料位14的器械框11放置于无纺布上,并将第三夹取部10更换为第一夹取部8;
69.使第一夹取部8与第二夹取部9同时夹取器械框11左侧的无纺布并向右覆盖器械框11;并使第二夹取部9持续夹持无纺布,同时使第一夹取部8夹取活动挡块37以及导向挡块36对器械框11左侧无纺布区域进行限位;
70.重复第一夹取部8与第二夹取部9动作,从器械框11右侧向左覆盖无纺布,并利用活动挡块37以及导向挡块36对器械框11右侧无纺布区域进行限位;
71.使第一夹取部8所属的戳板18对器械框11前/后侧的无纺布进行戳折,之后通过第二夹取部9使前后两侧的无纺布保持状态,同时第一机械臂6更换第一夹取部8至第三夹取部10,之后吸取胶带切割机构3所切割完成的胶带,并将其粘贴至前/后侧无纺布。
72.一种优选的实施方式中,上述包装系统在完成从无纺布横纵方向包装的基础上,还包括从从无纺布斜45度方向进行包装的功能,其操作步骤如下:
73.第一机械臂6利用第三夹取部10将上述横向包装完成的器械框11放置于器械框11暂存位,之后更换为第一夹取部8;
74.第一机械臂6通过第一夹取部8、第二机械臂7通过第二夹取部9将无纺布拉拽至尺寸约为1米
×
1米时,由纱布切割机构2对纱布进行切割;
75.第一机械臂6以及第二机械臂7将切割完成的无纺布放置于工作区后,第一机械臂6通过快换盘35实现与第一夹取部8的分离并更换为第三夹取部10;
76.第一机械臂6从器械框11暂存位获取横向包装完成的器械框11,旋转45度后放置于工作区,第一机械臂6将第三夹取部10更换为第一夹取部8;
77.第二夹取部9夹取无纺布的右前侧向左后侧覆盖于器械框11,当第二夹取部9带动无纺布移动至器械框11中间位置后,第一夹取部8夹紧上述无纺布的右前侧,第二夹取部9松开并夹取活动挡块37以及导向挡块36对无纺布的右前侧进行限位;
78.第一夹取部8夹取无纺布的左后侧向右前侧覆盖器械框11,当第一夹取部8带动无纺布移动至器械框11中间位置后,第二夹取部9夹紧上述无纺布的左后侧,第一夹取部8松开并夹取活动挡块37以及导向挡块36对无纺布的左后侧进行限位;
79.使第一夹取部8所属的戳板18分别对器械框11左前侧以及右后侧的无纺布进行戳折,之后通过第二夹取部9使上述两侧的无纺布保持状态,同时第一机械臂6更换第一夹取部8至第三夹取部10,之后吸取胶带切割机构3所切割完成的胶带,并粘贴于上述两侧的无纺布;
80.第三夹取部10夹取包装完成的器械框11并放置于下料位15,并由下料结构传出。
81.本发明实施例与前述实施例采用相同的技术手段,取得相同的技术效果,这里不再赘述。
82.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1