放射性药物称重系统及其控制方法与流程
放射性药物称重系统及其控制方法
【技术领域】
1.本发明涉及一种放射性药物称重系统及其控制方法。
背景技术:
2.放射性药物指含有放射性核素供医学诊断和治疗用的一类特殊药物,用于机体内进行医学诊断或治疗。目前放射性药物的分装大多会用到蠕动泵,利用蠕动泵泵头中的滚轮对弹性输送软管交替进行挤压和释放来泵送放射性药液。由于输送软管批次都可能存在一定的误差,而且蠕动泵电机的磨损、输送软管变形等原因,会使蠕动泵旋转一圈所输送的液体量发生变化,又因为放射性药物的分装是在密闭环境下分装的,受环境局限性的影响,分装好的药物无法实时称重,各批次产品分装量精度无法保证。
3.因此,本发明正是基于以上的不足而产生的。
技术实现要素:
4.本发明目的是克服了现有技术的不足,提供一种注液及称重自动化的放射性药物称重系统及其控制方法,增加自动校正蠕动泵的功能和分装称量的校准功能。
5.本发明是通过以下技术方案实现的:
6.一种放射性药物称重系统,其特征在于,包括:
7.主控制器,能发送控制程序指令;
8.可编程控制器,其与所述主控制器电性连接并能接收和处理主控制器发送的控制程序指令;
9.蠕动泵伺服驱动器,其与所述可编程控制器电性连接并用于控制蠕动泵马达驱动泵头以多次向药瓶中注入放射性药物母液或稀释液;
10.称重模块,其与所述可编程控制器电性连接,能对放置在分装位置上的药瓶注液前后的重量进行检测;
11.机械手,其与所述可编程控制器电性连接,能在注液称重前搬运药瓶到称重模块上和搬运能罩在药瓶外挡风的遮风罩罩在药瓶上,或在注液称重后取走遮风罩和药瓶。
12.如上所述的放射性药物称重系统,其特征在于:所述的蠕动泵马达包括用于驱动泵头输送母液的母液轴伺服马达和用于驱动泵头输送稀释液的稀释液轴伺服马达。
13.如上所述的放射性药物称重系统,其特征在于:所述的称重模块为称重传感器。
14.一种基于上述放射性药物称重系统的控制方法,其特征在于,包括进行蠕动泵校准,对蠕动泵校准包括以下具体步骤:
15.s1、机械手抓取用于校准的药瓶去分装位置,蠕动泵向药瓶注入q1圈已知密度的液体;
16.s2、机器人抓取遮风罩到分装位置上,遮住药瓶;
17.s3、称重模块称重,记录其中数据,得到装有液体时药瓶的重量g1;
18.s4、机器人从分装位置上取走遮风罩;
19.s5、进行二次注液,此时注液圈数为q2,记录下当前的重量g2,
20.计算得到比例值k=(g
2-g1)/q2;
21.s6、机械手从分装位置上取走遮风罩;
22.s7、机械手从分装位置上取走用于校准的药瓶,校准完成。
23.s8、机械手抓取待注入放射性药物母液的药瓶进行分装。
24.如上所述的放射性药物称重系统的控制方法,其特征在于:步骤s8中的分装包括以下具体步骤:
25.s9、机械手抓取药瓶去分装位置上;
26.s10、机械手抓取遮风罩去分装位置上,遮住药瓶;
27.s11、称重模块称重,记录空装时药瓶的重量g
10
;
28.s12、机械手从分装位置上取走遮风罩;
29.s13、蠕动泵注入设定体积v
10
、密度为ρ1的放射性药物母液;
30.s14、机械手抓取遮风罩去分装位置上,遮住药瓶,称重模块称重,记录装有放射性药物母液的药瓶重量g
11
;
31.s15、机械手从分装位置上取走遮风罩;
32.s16、计算v
11
=(g
11-g
10
)/ρ1是否与v
10
相等,若v
11
与v
10
的误差在允许范围内就进行封装,若v
11
与v
10
的误差不在允许范围内进行差值补入。
33.如上所述的放射性药物称重系统的控制方法,其特征在于:在步骤s16封装之前,蠕动泵向注入药瓶稀释液。
34.与现有技术相比,本发明有如下优点:
35.1、本发明工作时通过主控制器对可编程控制器设定和发送控制程序指令,可编程控制器按设定的控制程序控制机械手向分装位置搬运药瓶、遮风罩或从分装位置取走药瓶、遮风罩,可编程控制器还控制蠕动泵伺服驱动器控制蠕动泵马达驱动泵头以向药瓶中注入放射性药物母液或稀释液,并控制称重模块放置在分装位置上的药瓶的重量进行实时检测,整体自动化操作程度高,有利于降低劳动量和提高工作效率,还能适时的边注液边称量反馈控制,使分装核药液精度得到提高,以提高分装产品一致性、稳定性。
36.2、本发明通过增加自动校正蠕动泵的功能和分装称量的校准功能,保证了放射性药物分装的精准性。
【附图说明】
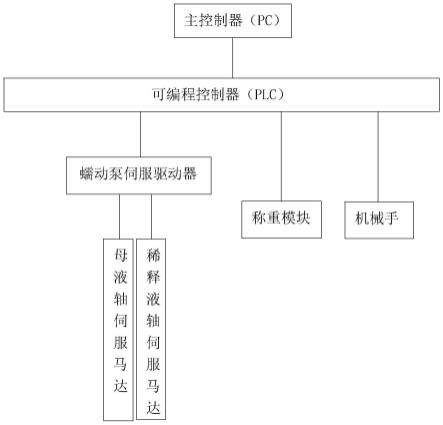
37.图1是本发明的系统图;
38.图2是本发明的蠕动泵校准方法的流程图;
39.图3是本发明的称量分装方法的流程图。
【具体实施方式】
40.下面结合附图对本发明作进一步描述:
41.如图1至图3所示,主控制器,能发送控制程序指令;可编程控制器,其与所述主控制器电性连接并能接收和处理主控制器发送的控制程序指令;蠕动泵伺服驱动器,其与可编程控制器电性连接并用于控制蠕动泵马达驱动泵头以多次向药瓶中注入放射性药物母
液或稀释液;称重模块,其与所述可编程控制器电性连接,能对放置在分装位置上的药瓶注液前后的重量进行检测;机械手,其与所述可编程控制器电性连接,能在注液称重前搬运药瓶到称重模块上和搬运能罩在药瓶外挡风的遮风罩罩在药瓶上,或在注液称重后取走遮风罩和药瓶。本系统中,遮风罩为一端开口的筒状结构,其能罩在药瓶外,挡住层流风,但不与称重模块及药瓶接触,不影响称重模块对药瓶的称重。工作时通过主控制器对可编程控制器设定和发送控制程序指令,可编程控制器按设定的控制程序控制机械手向分装位置搬运药瓶、遮风罩或从分装位置取走药瓶、遮风罩,可编程控制器还控制蠕动泵伺服驱动器控制蠕动泵马达驱动泵头以向药瓶中注入放射性药物母液或稀释液,并控制称重模块放置在分装位置上的药瓶的重量进行实时检测,整体自动化操作程度高,有利于降低劳动量和提高工作效率,还能适时的边注液边称量反馈控制,使分装核药液精度得到提高,以提高分装产品一致性、稳定性。
42.本实施例中,蠕动泵马达包括用于驱动泵头输送母液的母液轴伺服马达和用于驱动泵头输送稀释液的稀释液轴伺服马达。本系统中蠕动泵包括母液泵和稀释液蠕动泵,母液泵中具有母液轴伺服马达,母液轴伺服马达能驱动蠕动泵头,使得泵头通过滚轮对灌满放射性药物母液的弹性软管交替进行挤压和释放来泵送放射性药物母液,同样稀释液蠕动泵中稀释液轴伺服马达,稀释液轴伺服马达能驱动蠕动泵头,可以泵出固定的稀释液或者水,稀释液轴伺服马达和母液轴伺服马达均通过信号线与蠕动泵伺服驱动器连接并受蠕动泵伺服驱动器控制。
43.本实施例中,称重模块为称重传感器,称重传感器能感应放置在分装位置的药瓶的重量变化。
44.如图2-3所示,本发明还提供一种基于上述放射性药物称重系统的控制方法,包括进行蠕动泵校准,如图2所示,对蠕动泵校准包括以下具体步骤:
45.s1、机械手抓取药瓶去分装位置,蠕动泵向药瓶注入q1圈已知密度的液体;在具体实施中,该已知密度的液体为水,水的密度是1g/cm3,注射此液体是为了注射管路充满液体。
46.s2、机器人抓取遮风罩到分装位置上,遮住药瓶,去除层流风速对称重数据造成误差;
47.s3、称重模块称重,记录其中数据,得到装有液体时药瓶的重量g1;
48.s4、机器人从分装位置上取走遮风罩;
49.s5、进行二次注液,此时注液圈数为q2,记录下当前的重量g2,计算得到比例值k=(g
2-g1)/q2;
50.s6、机械手从分装位置上取走遮风罩;
51.s7、机械手从分装位置上取走校准瓶,校准完成;
52.s8、机械手抓取待注入放射性药物母液的药瓶进行分装。
53.蠕动的校准是由plc完成的,蠕动泵头由伺服马达驱动,plc通过sscnet网络控制伺服马达;蠕动泵每旋转一圈泵出来的体积k,即是体积与圈数比值,可以泵出固定的稀释液或者水,通过计算可以建立伺服马达的旋转角度与泵出液体体积的关系。
54.如图3所示,步骤s8中的分装包括以下具体步骤:
55.s9、机械手抓取药瓶去分装位置上;
56.s10、机械手抓取遮风罩去分装位置上,遮住药瓶;
57.s11、称重模块称重,记录空装时药瓶的重量g
10
;
58.s12、机械手从分装位置上取走遮风罩;
59.s13、蠕动泵注入设定体积v
10
、密度为ρ1的放射性药物母液;
60.s14、机械手抓取遮风罩去分装位置上,遮住药瓶,称重模块称重,记录装有放射性药物母液的药瓶重量g
11
;
61.s15、机械手从分装位置上取走遮风罩;
62.s16、计算v
11
=(g
11-g
10
)/ρ1是否与v
10
相等,若v
11
与v
10
的误差在允许范围内就进行封装,若v
11
与v
10
的误差不在允许范围内进行差值补入。
63.除了如步骤s16中,对v
11
在允许范围内的放射性药物母液进行封装外,还可以根据需要设定程序,在步骤s16封装之前,控制稀释液蠕动泵向注入药瓶稀释液,得到稀释后的放射性药物产品后封装。
64.本发明中,主控制器为pc,可编程控制器为plc,整个控制系统采用了plc的控制方式。plc使用了三菱最新一代r系列的中大型可编程序控制器,型号为r04en,自带160k字节的程序存储器,指令最快处理时间为0.98ns,同时有三个rj45接口,具有以太网、cc-link ie等工业总线功能;通过增加扩展模块,实现模拟量和数字量的输入/输出接口功能。plc与机械手之间使用cc-link工业总线通信,cc-link具有高速的数据传输速度,最高可达10m b/s,通信稳定可靠,保证机械手动作不会产生延迟。
65.机械手上装有夹具,可以夹取称重瓶和遮风罩;机器手采用了史陶比尔tx2 40stericlean机械手,该机械手最大负载为2公斤,工作半径为515mm。无菌机械手采用特殊关节和全封闭式结构,防护等级ip65,能够应对vhp环境下的消毒工艺。机械手控制器cs9提供支持ethercat、modbus tcp、以太网socket协议的通信端口。
66.本放射性药物称重系统以plc作为其控制器,很好处理了数据运算及设备逻辑控制的关系,确保了设备运行稳定安全可靠。生产过程采用符合gmp规范的机械手进行物料搬运工作,机构体积小,清洁和操作方便;保证了放射性药物分装的精准性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1