一种链驱动的大伸缩比恒力举升平台及其运行方法与流程
本发明属于输送机器人,具体涉及一种链驱动的大伸缩比恒力举升平台。
背景技术:
1、升降台是一种垂直运送人或物的起重机械。其主要包括工作台、底座、交叉式升降机构和电动驱动部件,电动驱动部件通过交叉式升降机构带动工作台升降,从而实现物体升降至不同高度,被广泛应用于物流、仓库和自动化流水线等领域,其中电动驱动部件一般采用电机带动丝杆或液压杆,通过丝杆转动或者液压杆伸缩带动交叉式升降机构中的剪叉臂运动,以此来实现平台的升降运动。
2、但目前传统的剪叉式升降台由于其本身的结构限制,导致在平台升降过程中,所需电机驱动力并非一个恒力,这就给电机控制带来一定的困难。对于丝杆剪叉机构,在运动过程中,当升降台处于最低位置时,剪叉臂接近处于完全水平状态,此时系统处于运动死点,在死点位置驱动剪叉式升降台上升,需要电机提供极大的驱动力,这就给驱动电机的功率和尺寸提出了较高的要求。而对于液压杆剪叉式升降机构,由于其本身的结构限制,其伸缩比相对较小。
3、为此,本领域技术人员尝试采用链条驱动方式,降低能耗、扩展平台的伸缩比。专利申请cn107651616a公开了一种高度可调节的链条顶起装置,它包括:顶升平台、伸缩导向装置、伺服电机、减速机、链条、电机安装板以及底部支撑安装组件;电机安装板安装在所述底部支撑安装组件上;伸缩导向装置固定在所述底部支撑安装组件上;顶升平台固定在所述伸缩导向装置上;伺服电机和减速机配合安装后固定在所述电机安装板上;减速机的输出轴上安装有链轮;链条缠绕安装在所述电机安装板上,且链条与链轮配合安装,链条延伸至顶升平台。该发明与气缸控制升降相比,更为实用方便、节省空间,可以控制其升降速度与停留位置,可以根据链条长度尽可能顶起和下降,与其他自动化设备或者生产线能更好配合。
4、专利cn103552948b公开了一种滑板用剪叉式升降台,包括滑动叉臂、固定叉臂、托板和基座,滑动叉臂和固定叉臂连接托板和基座,还包括刚性链条、驱动链轮和驱动电机,刚性链条一端固定在所述托板上,驱动电机固定在基座上,其输出轴连接驱动链轮,刚性链条绕过驱动链轮,刚性链条啮合面的销轴与驱动链轮的齿啮合,该刚性链条与驱动链轮啮合后其延伸方向发生改变,驱动链轮到托板之间的刚性链条处于竖起状态。该刚性链条也可以卷曲存储,节约安装空间并降低对安装空间的要求,刚性链条的长度可以根据需要调整,升降台的升降高度不会受到限制。
5、然而,上述链条传动的升降装置中,传动链条在举升受力过程中的限位结构单一,链条锁定稳定性仍显不足,当受到外界晃动或振动等影响时,传动链条仅靠一个方向的锁定所提供的刚性容易因链节间非锁死方向的转动而崩溃,进而导致装置受力的转移,引起装置部件的损坏,以及安全风险。此外,由于承载物重量、举升速度等差别,装置运行的能耗需求并不完全相同,统一的运行标准将不利于节能,而现有技术均未关注智能控制系统对装置运行安全及节能方面的促进作用。
6、如何利用链驱动的优势,提供稳定安全、节能高效的大伸缩比恒力举升平台,是本领域亟待解决的技术问题。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种链驱动的大伸缩比恒力举升平台,充分利用链驱动的优势,避免死点位置所需驱动力过大的缺点,实现大伸缩比恒力举升;通过设置双向限位结构,提供稳定安全的链条举升机构;以及智能控制系统的设置,为举升需求自动匹配合适的驱动力,降低能耗、节约成本。
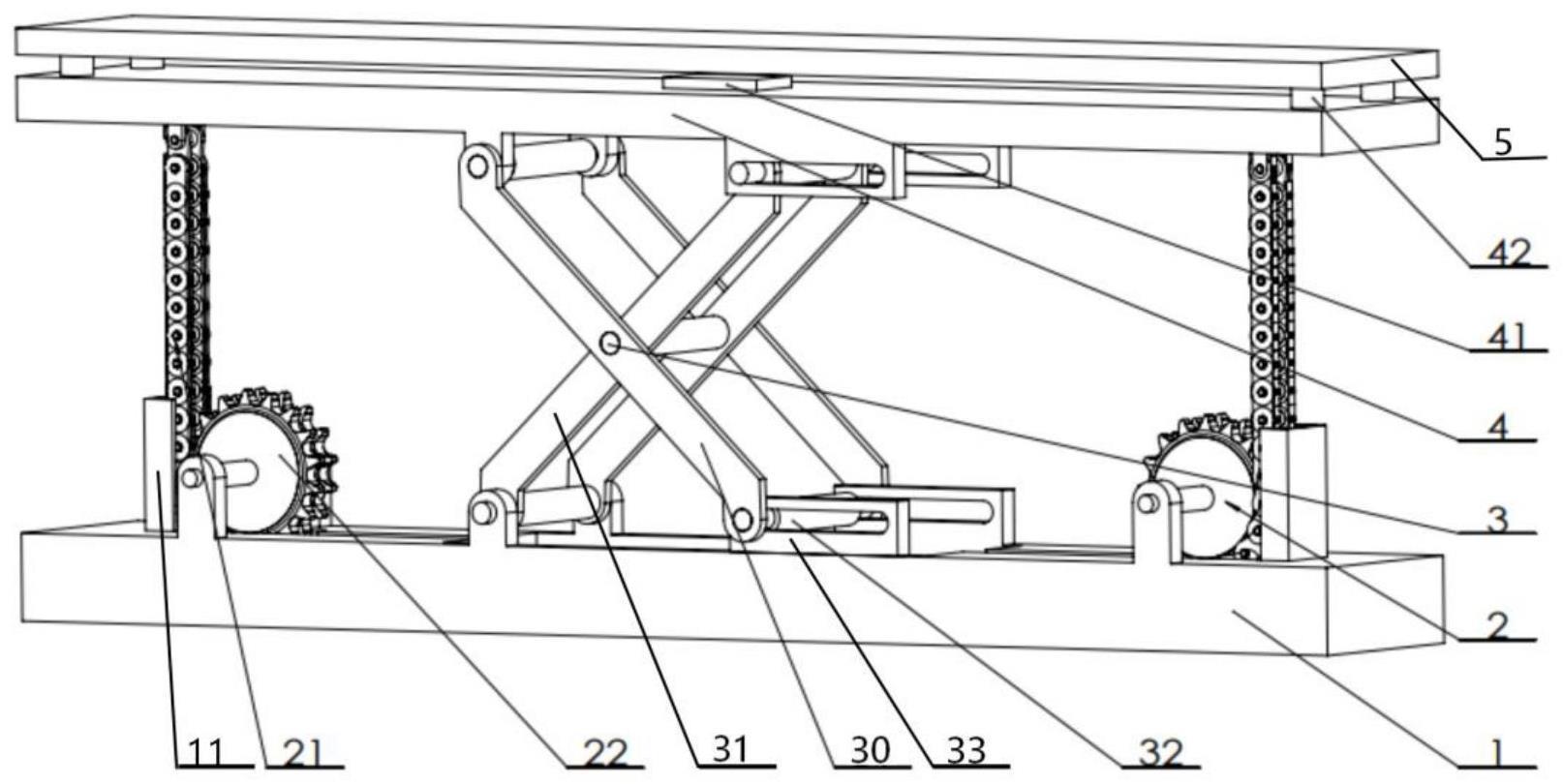
2、具体的,本发明提供了一种链驱动的大伸缩比恒力举升平台,包括底座、剪叉机构、升降平台、链条举升机构及控制系统;
3、所述剪叉机构分别通过转动副和移动副连接在底座和升降平台之间;
4、所述链条举升机构,包括安装于底座上的至少一个链轮及其驱动电机,所述驱动电机与所述控制系统电连接;所述链轮与链条啮合,所述链条的顶部通过转动副与升降平台底部连接;
5、所述链条包括交替连接的内链节和外链节,以及限位机构;所述限位机构包括分别对相邻链节的相反转动方向进行限位的第一限位机构和第二限位机构,双向锁定链条在竖直方向举升运动。
6、通过限位机构的设置,确保举升过程中双向锁定链条相邻内链节和外链节相对转动,使链条在举升过程中展示出刚性传动和支撑效果,且不受外界影响的保持竖直方向的运动。关于第一限位机构和第二限位机构的具体位置,它们既可都设置在内链节上,也可都设置在外链节上,优选的,将第一限位机构设于内链节,将第二限位机构设于外链节,从而简化单个链节结构,便于生产和更换。
7、所述驱动电机可安装在底座上,也可在底座外单独装配,其可与减速机配合,减速机的输出轴上安装所述链轮。当设置多个链轮时,可采用同一台电机联动驱动,保证举升同步性;也可使用独立驱动电机对每个链轮单独驱动,通过控制系统监控并控制举升同步性,且根据需要实时调整个别驱动条件。
8、进一步的,所述剪叉机构包括第一叉臂和第二叉臂,第一叉臂上端通过转动副、第二叉臂上端通过移动副分别与升降平台连接;第一叉臂下端通过移动副、第二叉臂下端通过转动副分别与底座连接。
9、优选的,所述第一叉臂和第二叉臂的中部通过转动副连接;所述移动副包括滑动连接的滑块与滑轨,滑轨分别固定在底座和升降平台上,第一叉臂下端连接第一滑块从而连接底座,第二叉臂上端连接第二滑块从而连接升降平台。优选的,所述剪叉机构包括至少两组剪叉机构,更优选的,所述剪叉机构并联的设置在升降平台和底座之间。
10、本发明所使用剪叉机构的目的并非将其作为动力系统,而主要利用剪叉机构较为稳定的伸缩性能,为举升平台的升降过程提供稳定的导向保障。
11、进一步的,所述第一限位机构包括与内链节或外链节一体成型的若干限位挡板,所述限位挡板位于内链节或外链节背向链轮的一侧,限制相邻链节在第一方向的旋转。优选的,将第一限位机构设置于内链节,即第一限位机构包括与内链节一体成型的若干限位挡板,所述限位挡板位于内链节背向链轮的一侧,限制相邻外链节在第一方向的旋转。更优选的,设置4片限位挡板,分别位于内链节外侧四角的曲面切线方向,且平行于内链节两连接轴的中心连线。限位挡板具有足够的宽度和长度,能够延伸到相邻外链节的外侧壁,对相邻外链节进行止挡限位,防止其在第一方向过度旋转。
12、进一步的,所述内链节和外链节通过连接轴转动连接,所述内链节与连接轴固定;所述第二限位机构包括棘轮、棘爪和弹性件,所述棘轮固定在所述连接轴上,所述棘爪转动的固定在所述外链节上,所述弹性件的一端固定在外链节上,另一端抵持在棘爪上;通过链轮排齿与棘爪的抵接和分离实现棘爪与棘轮的分离和抵持,以解锁或限制所述外链节在第二方向的旋转;所述第二方向与第一方向相反。
13、通过第二限位机构内部构件的配合,以及其与第一限位机构、链轮的外部配合,在链条绕行链轮且与其啮合的过程中,链轮排齿抵接棘爪且压缩弹性件,使棘爪与棘轮分离,外链节朝第二方向旋转,使链条展示出柔性;在链条举升段及收纳段,即未与链轮接触啮合时,棘爪在弹性件的弹性回复力作用下,抵持棘轮,限制外链节在第二方向的旋转,链条各连接轴的中心连线基本呈一条直线,使链条展示出刚性。可选的,在升降平台处于底部或低位时,未通过链轮的水平段链条收纳在底座空腔中;为了节省收纳空间,可在底部空腔中设置收纳链轮,以前述提供驱动力的链轮类似的原理,收纳链轮与链条的限位机构配合,使链条展示出柔性而实现弯曲收纳。
14、所述弹性件可选择本领域常用的弹性部件,只要操作方便、空间占位不大且能提供足够弹性回复力的弹性件,均可选用,例如弹簧、板簧等。控制系统主要包括主控制器(例如stm32f407 mcu)及相应的信息收集模块(例如stm32f103 mcu)、计算模块等常用组成。
15、进一步的,所述链轮为双排链轮,其一排齿与链条啮合,另一排齿与所述棘爪配合。选择双排链轮,对两侧排齿进行分工,一排齿用于与链条啮合传动,另一排齿与棘爪配合实现解锁或限位。两侧排齿的数量位置对应相同,但齿形可根据需要稍作变化,以利于各自作用的充分发挥。选用双排链轮的优势还在于,包括棘轮、棘爪和弹性件的第二限位机构的位置设置更加灵活。采用普通单排链轮时,单排齿需同时实现与链条啮合及与棘爪配合,第二限位机构需设置在外链节的内侧,对链节结构配合要求较高,且故障率和维修难度较大。而采用双排链轮时,外链节的第二限位机构可设置于外链节的外侧面,使得外链节内侧和外侧分别发挥啮合及限位功能,结构清晰,布置空间更大,更换维修更简便。
16、进一步的,所述链条举升机构包括至少两个双排链轮;在链条背向双排链轮的一侧设有固定在底座上表面的竖直导板,竖直导板的高度h与双排链轮半径r之间满足:r≤h≤2r。根据升降平台的承载需求和受力情况,在底座上对称布置若干双排链轮,例如在底板长度方向对称布置两个双排链轮,有利于分担举升动力,提供更为稳定平衡的举升动作。为了提高链条与链轮的贴合度,防止二者在啮合过程中分离,以及举升时在链条即将离开链轮的位置减少晃动,竖直导板对链条能够起到保护及导向作用,有利于链条在竖直方向的稳定举升运动。
17、进一步的,所述升降平台上方设有载荷平台,与控制系统信号连接的若干载荷传感器设置于载荷平台和升降平台之间,控制系统通过采集所述载荷传感器的检测信息,获得载荷平台及其承载物的总重量,以确定驱动电机输出功率。
18、进一步的,所述升降平台的四个角均设置载荷传感器,且通过所述载荷传感器支撑连接所述载荷平台。通过上述设置,当待举升物体放置到载荷平台后,控制系统立刻收到载荷信息,如果总重量超过阈值,控制系统将发出提示信息;可选的,根据四个角的载荷传感器反馈的载荷信息,判断承载物放置位置是否在安全区域,如果四个角的载荷量差值超过设定阈值,说明物体放置位置有待调整,否则在举升过程中,存在受力不均而导致设备损坏及安全风险。另一方面根据载荷平台及其承载物的总重量,及所需举升速度,计算出驱动电机所需输出总功率及转速,做好举升准备。
19、优选的,载荷平台及其承载物的总重量m、设定举升速度v与驱动电机输出总功率p和链轮转速n之间,满足以下公式:
20、
21、m= m1+m2+m3+m4 (2);
22、
23、其中,m0为升降平台重量;v为设定举升速度;f为传动效率,f为0.8-0.9;m1-m4为四个载荷传感器检测的重量值;z为链轮的齿数;d为链节距,单位mm;n为链轮转速,单位r/min;t为举升时间,α为第一叉臂或第二叉臂的弹性模量,l为第一叉臂或第二叉臂的的长度,t为第一叉臂或第二叉臂的惯性矩。传动效率是鉴于链条自重、系统摩擦、热能损耗等相应损耗之下,通过多次实验摸索的经验值,系统可根据载荷总重量、举升速度等条件进行选择和矫正。
24、当预先设定好举升速度时,控制系统可根据载荷传感器检测到的载荷信息,为举升平台的运行匹配合适的电机输出总功率,既有利于提供稳定的驱动,增强工作安全性,也可有效节能。当需要调整举升速度时,通过调整电机转速,改变链轮转速即可迅速改变,与此同时,控制系统也将同时再匹配相应的电机输出总功率,使切换过程平稳过渡,减少运行风险。
25、除了设置载荷传感器外,进一步设置与控制系统信号连接的位姿传感器,用于检测升降平台的位姿信息。例如平台的水平度、振动频率等。该位姿传感器可设置于升降平台上表面或下表面,或者根据需要设于其他位置。虽然通过上述载荷传感器的检测值,已能够规避大多数举升风险,然而,通过加设位姿传感器,能够更快速和直观的展示举升情况,特别在举升对象为运动物体时,位姿传感器能够根据升降平台的位姿变化迅速反馈控制系统以调整驱动电机转速,必要时预警举升风险,发出提示信息或警报。
26、此外,为了便于使用,在不影响举升稳定性的基础上,在底座上还可设置移动部件,例如移动履带,或者在底座底部设置可锁定滑轮,将上述移动部件与控制系统信号连接,实现智能化移动定位控制。
27、相应的,本发明还提供一种针对上述链驱动的大伸缩比恒力举升平台的运行方法,包括如下步骤:
28、将待举升物体放至升降平台上;
29、驱动电机驱动链轮转动,将与所述链轮啮合的链条向上输送,通过限位机构限制链条相邻内链节和外链节的相对转动,保证链条在竖直方向举升运动,实现物体举升。
30、优选的,具体运行方法还包括,链条接触链轮时,链轮的排齿与链条啮合,同时推动棘爪与棘轮分离,外链节可旋转,链节处于解锁状态;链条离开链轮时,棘爪与链轮分离,弹性件的回复力将棘爪抵触在棘轮上,链节在第二方向锁死;配合限位挡板的作用,外链节在第一方向也无法转动,第一方向和第二方向相反,链条以双向自锁方式输送。
31、更优选的,链轮使用双排链轮,当链条接触双排链轮时,双排链轮的一排齿与链条啮合,另一排齿推动棘爪与棘轮分离,外链节可旋转,链节处于解锁状态;链条离开双排链轮时,棘爪与双排链轮分离,弹性件的回复力将棘爪抵触在棘轮上,链节在第二方向锁死;配合限位挡板结构的作用,外链节在第一方向也无法转动,链条以双向自锁方式输送。
32、本发明提供的一种链驱动的大伸缩比恒力举升平台及其运行方法,至少包括如下有益效果:
33、1、本发明中采用链条举升结构实现平台的升降,相比于传统剪叉驱动结构,本发明的驱动力为恒力,控制系统设计简单可靠;相比于传统丝杆剪叉结构,本发明不存在运动死点位置,对于电机的功率和尺寸要求较低;相比于传统液压杆剪叉结构,本发明可实现更大伸缩比的升降。
34、2、采用限位机构,特别是内链节上第一限位机构的限位挡板,外链节上包括棘轮、棘爪和弹性件的第二限位机构,在与链轮排齿的配合下,实现了链条的刚柔切换,使举升过程中链条双向锁紧,保证举升过程稳定安全的进行。且链条可以和链轮一起完全收纳在底座内部,不额外占用空间。
35、3、智能控制系统的设置,显著提供了运行安全性和节能性。本发明采用载荷传感器检测承载重量,可以自动调节驱动电机输出功率,降低系统功耗;进一步采用位姿传感器检测升降平台的位姿,实时监测和保持平台的稳定安全。
- 还没有人留言评论。精彩留言会获得点赞!