一种叉车AGV的制作方法
一种叉车agv
技术领域
1.本技术涉及物流技术领域,尤其是涉及一种叉车agv。
背景技术:
2.目前传统的地面搬运工具为顶升式agv和叉车,顶升式agv表现为能够进入到货架下面,通过顶升将货物驮起,完成货品的搬运,对于托盘承载的货物,目前没有合适的地面自主小车可以搬运,现有技术中常用叉车搬运托盘承载的货物,常见的叉车前端具有能够对货物进行叉取的货叉,后端有对应的配重设施,这样导致其转弯半径非常大,需要为这种叉车留有比较宽的巷道,这样浪费很多空间,使得存储密度变低。
技术实现要素:
3.本技术的目的在于提供一种叉车agv,解决现有技术中托盘的搬运与存储密度不可兼顾的技术问题。
4.第一方面,本技术的实施例提供了一种叉车agv,用于叉取托盘,包括车体、伸缩叉,所述伸缩叉包括门架和货叉,所述门架安装于车体上,所述货叉设置于门架上,所述货叉配置为可沿门架上下移动,所述车体上开设有槽口,所述门架配置为可在所述槽口内沿水平方向移动。
5.进一步,所述槽口有底板,所述槽口开口端的底板形状为一斜台,所述斜台向开口端方向向下倾斜;
6.所述门架下端设置有导轮和承重轮,所述导轮包括第一导轮,所述第一导轮与所述承重轮安装在同一安装部件上,配置为,当所述第一导轮在所述斜台上上坡行走时,所述承重轮逐渐抬离地面,当所述第一导轮在所述斜台上下坡行走时,所述承重轮逐渐向下至接触地面;所述导轮还包括第二导轮,所述第二导轮在所述槽口的底板上为所述门架的移动支撑导向;所述导轮包括第三导轮,所述第三导轮在所述槽口的侧壁上为所述门架的移动导向。
7.进一步,所述门架上安装有用于驱动门架在所述槽口内沿水平方向移动的驱动机构,所述驱动机构包括电机、传动部件和齿轮,所述叉车agv 的车体上设置有与所述齿轮啮合的齿条,所述电机通过传动部件带动齿轮转动,所述齿轮与所述齿条啮合,从而带动门架在所述槽口内沿水平方向移动。
8.进一步,所述传动部件包括减速机、万向节、传动轴、齿轮轴、轴承座,所述减速机安装在门架上,所述电机的电机轴与减速机连接,所述减速机通过万向节、传动轴连接齿轮轴,从而带动齿轮转动,所述齿轮轴套接于轴承座内,所述轴承座安装在门架上。
9.进一步,所述门架上设置有主动链轮和从动链轮,所述主动链轮和所述从动链轮分别设置在所述门架上下方向的两个端头,链条绕过所述所述主动链轮和所述从动链轮,所述链条联动所述货叉上下升降,所述门架上还包括用于驱动主动链轮旋转的链轮驱动电机。
10.进一步,所述叉车agv还包括丝杠螺母机构和货叉驱动电机,所述货叉驱动电机通过丝杠螺母机构带动货叉沿门架上下移动。
11.进一步,所述车体的底盘上安装有驱动轮和万向轮,所述底盘上还包括用于给驱动轮提供驱动力的驱动电机,所述万向轮通过万向轮安装板安装在轮罩上,所述轮罩与底盘连接。
12.进一步,所述万向轮安装板的一端和所述轮罩铰接,另一端有一个卡榫突出,所述轮罩配置有使所述卡榫穿过的穿孔,所述穿孔的面积大于所述卡榫的横截面面积,配置为使所述卡榫在所述穿孔能够活动。
13.进一步,所述万向轮安装板与所述轮罩之间有弹性缓冲部件。
14.进一步,所述弹性缓冲部件为弹簧或者橡胶。
15.本技术提供的的叉车agv,伸缩叉包括门架和货叉,货叉安装在门架上,通过门架整体的伸缩运动完成取放货托盘货物,比传统叉车减少了配重,减小了叉车体积,本技术提供的叉车agv适应于窄巷道的搬运工作,有利于提高托盘货物的仓储密度。
附图说明
16.为了更清楚地说明本技术具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
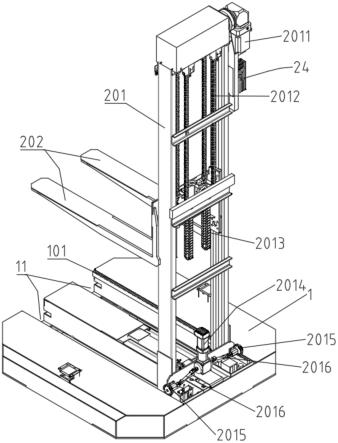
17.图1为本实施例一种实施方式的托盘搬运小车结构示意图
18.图2为本实施例一种实施方式的托盘搬运小车主视图的结构示意图
19.图3为图2的托盘搬运小车主视图方框中部位的放大图
20.图4为本实施例一种实施方式的托盘搬运小车的底盘结构示意图
21.图5为本实施例一种实施方式的托盘搬运小车伸缩叉伸出的结构示意图
22.图6为本实施例一种实施方式的门架驱动传动装置的结构示意图
23.图7为本实施例一种实施方式的万向轮轮罩结构示意图
24.图8为本实施例一种实施方式的万向轮安装结构剖面示意图
25.图标:图标:1、车体;11、槽口;12、斜台;23、第一承重轮;231、第二驱动电机;24、伸缩叉电控箱;25、第一导轮;31、万向轮;32、驱动轮;
26.2501、第二导轮;2502、第三导轮;101、齿条;102、摄像装置;201、门架;202、货叉;2011链轮驱动电机;2012、链条;2013、货叉拖链;2014、门架驱动电机;2016、传动部件;2016-1、万向节;2016-2、传动轴;2016-3、齿轮轴;2016-4、轴承座。
具体实施方式
27.下面将结合实施例对本技术的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
28.为便于对本实施例进行理解,下面结合附图进行阐述。
29.一种叉车agv,用于叉取托盘,包括车体1、伸缩叉,所述伸缩叉包括门架201和货叉202,所述门架201安装于车体1上,所述货叉202设置于门架201上,所述货叉202配置为可沿门架201上下移动,所述车体上开设有槽口11,所述门架201配置为可在所述槽口11内沿水平方向移动。
30.具体的,如图1所述,所述伸缩叉配置为在槽口11内部和车体1外部之间水平伸缩移动,所述伸缩叉的伸缩方向沿垂直于车体1的行走方向伸缩。本实施例的托盘搬运小车,整体轮廓呈矩形,伸缩叉整体沿垂直于车体1的行走方向伸缩,即为当本实施例的托盘搬运小车在窄巷道内行走时,车体1轮廓的宽对应巷道的宽行走,此时车体1轮廓的宽与巷道的宽大致平行,伸缩叉向车体1行走方向的一侧伸叉取放托盘货物,从而本实施例的托盘搬运小车适用于搬运窄巷道的高仓储密度货物。
31.所述车体1的底盘上安装有驱动轮32和万向轮31,所述底盘上还包括用于给驱动轮提供驱动力的驱动电机,图7-8所示,所述万向轮通过万向轮安装板312安装在轮罩311上,所述轮罩311与底盘连接。
32.所述万向轮安装板312的一端和所述轮罩311铰接,另一端有一个卡榫 314突出,所述轮罩311配置有使所述卡榫314穿过的穿孔,所述穿孔的面积大于所述卡榫314的横截面面积,配置为使所述卡榫314在所述穿孔能够活动。
33.所述万向轮安装板312与所述轮罩311之间有弹性缓冲部件313。所述弹性缓冲部件为弹簧或者橡胶。
34.如图4所示,所述行走机构包括车体1行走机构和伸缩叉行走机构;所述车体1行走机构包括多个万向轮31和至少两个驱动轮32,通过控制两驱动轮32之间的速度不同进行转向。本实施例的托盘搬运小车具有4个万向轮31,分别设置在车体1底板的四角位置,两个驱动轮32,车轮行走方向与伸叉方向垂直,转向方式为差速转向,即控制两个驱动轮32的速度不同,实现转向。本实施例的托盘搬运小车还包括摄像装置102,安装于小车底盘的正中心,用于二维码导航的搬运小车扫描地面二维码。
35.所述槽口11有底板,所述槽口11开口端的底板形状为一斜台12,所述斜台12向开口端方向向下倾斜;
36.所述门架201下端设置有导轮和第一承重轮23,所述导轮包括第一导轮25,所述第一导轮25在所述斜台12上支撑行走;所述第一导轮25与所述第一承重轮23安装在同一安装部件上,配置为,当所述第一导轮25在所述斜台12上上坡行走时,所述第一承重轮23逐渐抬离地面,当所述第一导轮25在所述斜台12上下坡行走时,所述第一承重轮23逐渐向下至接触地面;所述导轮还包括第二导轮2501,所述第二导轮2501在所述槽口 11的底板上为所述门架201的移动支撑导向;所述导轮包括第三导轮2502,所述第三导轮2502在所述槽口11的侧壁上为所述门架201的移动导向。
37.如图2所示,所述伸缩叉行走机构包括承重轮和导轮,所述承重轮用于在伸缩叉伸至托盘底部时与地面接触,所述导轮包括第一导轮25,所述第一导轮25用于在伸缩叉回缩至车体1槽口11内时上坡进而抬升所述承重轮,所述导轮不与地面接触,所述槽口11开口端的底板形状为一斜台12,所述斜台12向开口端方向向下倾斜;所述导轮在斜台12上行走或者在槽口11的底板上行走或者悬空。
38.所述门架201上安装有用于驱动门架在所述槽口11内沿水平方向移动驱动机构,
所述驱动机构包括门架驱动电机2014、传动部件2016和齿轮 2015,所述叉车agv的车体上设置有与所述齿轮2015啮合的齿条101,所述门架驱动电机通过传动部件2016带动齿轮2015转动,所述齿轮2015与所述齿条101啮合,从而带动门架201在所述槽口11内沿水平方向移动。
39.所述传动部件2016包括减速机、万向节2016-1、传动轴2016-2、齿轮轴2016-3、轴承座2016-4,所述减速机安装在门架201上,所述门架驱动电机的电机轴与减速机连接,所述减速机通过万向节2016-1、传动轴2016-2 连接齿轮轴2016-3,从而带动齿轮2015转动,所述齿轮轴2016-3套接于轴承座2016-4内,所述轴承座2016-4安装在门架201上。
40.所述伸缩叉包括门架201和货叉202,所述门架201设置在车体1上,配置为所述门架201可在所述槽口11内沿水平方向移动,所述货叉202设置于门架201上,所述货叉202配置为可沿门架201上下移动。所述门架 201呈“l”形,所述“l”形门架201包括一个水平架和一个垂直架。所述伸缩叉行走机构设置在“l”形门架201的水平架的下端,所述伸缩叉行走机构用于带动门架201移动,所述“l”形门架201的水平架伸至地面与紧邻地面的川字形托盘的川字形空隙中,当搬运小车需要搬运紧邻地面的托盘或者托盘及货物时,货叉202先降至最下端,货叉202与“l”形门架201 的水平架一同深入到紧邻地面的托盘的川字形空隙中,货叉202向上移动,抬升托盘,使托盘或者托盘及货物离开地面,然后门架201携带货叉202 缩回至车体1,完成取货,取货完成后,货叉202可以下降至槽口11内,将托盘或者货盘及货物承载在车体1上,也可以由货叉202托举托盘或者拖盘及货物货物移动。当搬运小车需要搬运货架上的货物时,货叉202先升至需要搬运的托盘的川字形空隙对应的高度,“l”形门架201再带动货叉202一起伸出,其中,“l”形门架201的水平架伸至地面与紧邻地面的川字形托盘的川字形空隙中,货叉202伸至需要搬运的托盘的川字形空隙中,货叉202在“l”形门架201的垂直架上向上移动,从而将需要搬运的托盘或者托盘及货物托起,然后门架201携带货叉202缩回至车体1,完成取货,取货完成后,货叉202可以下降至槽口11内,将托盘或者货盘及货物承载在车体1上,也可以由货叉202托举托盘或者拖盘及货物货物移动。图6示出了门架驱动传动装置的结构示意图,所述门架还包括门架驱动电机2014,所述门架驱动电机2014安装于垂直架的底部位置,门架驱动电机 2014通过传动部件2016带动齿轮2015转动,齿轮2015安装于垂直架的底部位置,所述车体上沿伸缩叉伸出方向有齿条101,车体上的齿条101与门架上的齿轮2015啮合,从而完成伸缩叉伸出及缩回的动作,所述传动部件 2016为万向节2016-1传动,所述万向节2016-1传动包括万向节2016-1、传动轴2016-2、齿轮轴2016-3和齿轮轴2016-4,所述门架驱动电机2014电机通过减速机万向节2016-1、传动轴2016-2、齿轮轴2016-3、传递到齿轮 2015上。减速机和齿轮轴2016-4安装在移动门架上。所述叉车agv还包括伸缩叉电控箱24,所述伸缩叉电控箱24安装在门架上。
41.如图3所示,所述导轮还包括第二导轮2501和第三导轮2502,所述第二导轮2501在所述槽口11的底板上为所述门架201的移动支撑导向;所述第三导轮2502在所述槽口11的侧壁上为所述门架201的移动导向;所述第一导轮25在所述斜台12支撑行走;所述第一导轮25与所述第一承重轮23 安装在同一安装部件上,配置为,当所述第一导轮25在所述斜台12上上坡行走时,所述第一承重轮23逐渐抬离地面,当所述第一导轮25在所述斜台12上下坡行走时,所述第一承重轮23逐渐向下至接触地面。
42.如图5所示,本实施例中,第一导轮25有两个,对应第一导轮25放入下方各有一个
斜台12,两斜台12的斜面平行,当两个所述第一导轮25同时在所述斜台12上上坡行走时,所述第一承重轮23逐渐抬离地面,当两个所述第一导轮25同时在所述斜台12上下坡行走时,所述第一承重轮23 逐渐向下至接触地面。所述第二导轮2501可以是一个也可以是两个,所述第二导轮2501始终在车体1底板上行走。第三道轮始终在槽口11的侧壁上行走。
43.所述货叉202沿门架201上下移动通过链轮链条2012结构带动或者通过丝杆螺母结构带动。如图1-8所展示的托盘搬运小车,其货叉202沿门架201 上下移动通过链轮链条2012结构带动,其具体详细结构图中未示意出,包括主动链轮和从动链轮,链轮驱动电机2011用于驱动主动链轮转动,链条 2012绕过主动链轮和从动链轮,链条2012与货叉202通过货叉202安装板连接,通过链轮链条2012转动带动货叉202上下升降,货叉202安装板上设置有导向轮,所述导向轮在门架201的垂直架上滑动。除链轮链条2012 结构结构以外,还可以选择丝杆螺母结构,所述叉车agv还包括丝杆螺母结构,丝杆与门架的垂直架平行,货叉202与螺母固定连接,驱动丝杆转动,从而带动货叉202沿门架上下移动。具体的,丝杆与门架201的垂直架平行,将货叉202与螺母固定连接,驱动丝杆转动,从而实现货叉202 沿门架201的垂直架上下移动。
44.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
45.另外,在本技术实施例的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
46.在本技术的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
47.最后应说明的是:以上各实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述各实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1