太阳能发电厂的清洁机器人的制作方法
本发明总体上涉及太阳能收集器清洁领域,特别是用于太阳能收集器的清洁机器人。
背景技术:
1、因为太阳是无限的可再生能源,为减少排放提供了解决方案,故激发了太阳能产业的迅速发展。
2、太阳能收集器一般采用电池板的形式,通常成排安装在屋顶或固定在地面(或类似位置)的支撑台上。光伏太阳能收集器通常有别于热太阳能收集器。
3、光伏太阳能收集器(又称光伏组件)通过转换太阳光产生电能。光电模块由相互电气连接的太阳能电池组成。
4、太阳热能收集器,又称太阳能收集器或太阳能电池板,是一种设计用于收集通过辐射传输的太阳能,并以热能的形式将其转移到导热流体(气体或液体)中的装置。太阳能收集器也采用太阳能电池板的形式,通常安装在屋顶上,用于生产生活热水或供暖。
5、在工业规模上,有一些光伏太阳能发电厂,其中的光伏组件被排列在由多条平行线或多排光伏组件组成的区域内。
6、清洁这些太阳能收集器的表面是非常重要的,这样才能确保其效率。
7、对于屋顶的太阳能收集器,可以采用人工方式进行清洁(操作人员在屋顶上用扫帚和喷水器清洁)。当屋顶的坡度增大和/或太阳能收集器的表面积增大时,可使用带刷子的铰接臂(如果屋顶不太高),或使用可在太阳能电池板上移动的履带式遥控机器人(参见wo2020/200694a1号专利)。
8、在工业装置(如太阳能发电站或太阳能农场)中,其中存在安装在地面上的大型电池板组件,清洁工作可通过在电池板和/或其边缘的导轨引导下,在一排排的太阳能收集器上移动的刷子装置来完成。例如,这种装置在de102010025845a1号专利中已为人所知。
9、其他刷子装置也已普遍存在,例如wo2016/006246a1号专利。根据这种装置,刷子与待清洁的太阳能电池板表面接触,并借助弹簧将其压紧。但由此产生的压力可能会损坏太阳能电池板。
10、也可以使用在太阳能收集器之间的地面上行驶并配备清洁装置的车辆。例如,ep2567758号专利介绍了一种清洁装置,包括一个刷子,刷子连接在液压操纵的铰接臂上,用以安装在拖拉机等农业机械上。
11、这种机器的驾驶非常复杂,因为机械臂是由驾驶员控制的,驾驶员坐在呈一排的太阳能收集器旁边,必须预估刷子的方向/倾斜度以及与太阳能收集器表面之间的距离。
12、在这方面有几个要点至关重要。必须控制刷子与面板之间的距离,这样施加在面板上的压力才不会损坏面板。刷子的角度也很重要:为了确保压力均匀,并保证呈一排的面板在整个宽度上得到清洁,刷子必须与面板的平面平行。在这方面,ep2567758号专利所设想的解决方案似乎风险更大:不同排之间的地面的不平整会导致刷子(杠杆臂)的大幅移动。us2020/164414a1号专利所设想的解决方案也是如此,它也描述了一种清洁组件,该组件由一个刷子组成,刷子连接到安装在车辆上的液压铰接臂上。
技术实现思路
1、本发明的目的是提供一种设计经过改进的车辆,可以有效、安全地控制清洁工具,专门用于在太阳能发电厂周围移动。
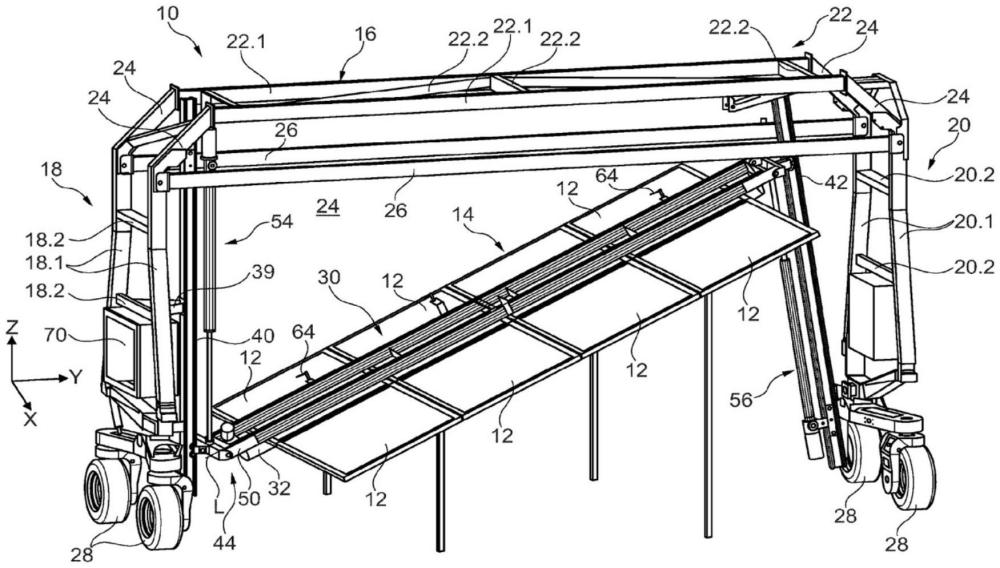
2、本发明涉及一种用于太阳能收集器的清洁机器人,包括:
3、龙门式框架,配置为横跨呈一排的太阳能收集器并限定相应的清洁空间;
4、车轮,其固定在龙门式框架上,并与致动器相连,用于移动龙门式框架;
5、清洁工具,其横跨龙门式框架的宽度延展,并能够在清洁空间内移动,以便相对于太阳能收集器的上表面进行定位,清洁工具通过固定在龙门式框架上的导轨进行导向;
6、致动器,用于沿导轨移动清洁工具;
7、至少一个距离传感器,用于确定清洁工具与相应的太阳能电池板之间的距离;
8、控制单元,其与至少一个距离传感器相连,用于通过致动器调整清洁工具相对于呈一排的太阳能收集器的位置,
9、其中:
10、龙门式框架包括两个侧立柱,其顶部通过横向部件连接,其中,两个导轨中的每一个分别固定在两个侧立柱中的对应一个上,
11、清洁工具在其端部具有相应的导向元件,该导向元件可与两个导轨中的对应一个进行配合,
12、两个导轨限定清洁工具的运动平面,其中,两个导轨中的一个导轨与两个侧立柱中的一个侧立柱铰接,以便能够在运动平面内转动,以及
13、致动器,包括在清洁工具两端分别与龙门式框架相连的线性致动器,其致动杆分别与清洁工具和导向元件相连。
14、因此,本发明提出了一种能够横跨太阳能收集器,特别是呈一排的太阳能收集器的采用龙门式框架的清洁机器人。清洁工具,特别是刷子类型的清洁工具,在机器人的清洁空间内移动,而太阳能电池板就位于机器人的清洁空间内。通过使用距离传感器,可以在清洁工具移动时连续或准连续(即实时)地调整清洁工具与太阳能电池板顶部的距离。因此,清洁工具通常与太阳能电池板表面保持预定距离。
15、根据本发明,线性致动器的致动杆通过导向元件直接或间接地连接到清洁工具上。在清洁工具的两端分别安装线性致动器,可以独立控制清洁工具的每一侧,从而使清洁工具的每一端都能进行不同长度的移动,以便使清洁工具的角度与待清洁的太阳能电池板的倾斜度相适应。
16、与已知的解决方案,特别是与ep2567758号专利中描述的液压刷式拖拉机相比,本发明的机器人结构尤为优越:
17、-龙门式设计意味着需要清洁的面板可以跨行。这样就可以在龙门式框架下支撑清洁工具,避免悬空,提高操作精度。
18、-龙门形状减少了机器人的占地面积,使其可以在狭窄的行间距内行走。例如,这种机器人的行间距约为60厘米,而拖拉机形式的清洁器需要的太阳能电池板行间距达到3米。
19、-通过传感器自动调整清洁工具的位置。
20、-清洁工具两侧的导轨结构可提供强有力的垂直导向。
21、虽然该清洁机器人是为清洁表面平坦的光伏太阳能收集器而开发的,但它也可用于任何类型的太阳能收集器,无论是光伏还是热能收集器、平面还是曲面,只要在必要时调整尺寸和/或清洁工具即可。
22、侧立柱和横梁最好是镂空的,以限制其重量。它们可以由任何类型的部件制成,如梁、型材和管。这些部件可以由金属(尤其是铝合金或钢)或复合材料制成。
23、清洁工具最好是刷子类型的,它可以包括一个或多个刷子,配置成横跨龙门式框架的宽度。
24、清洁工具最好包括至少一个沿第一轴线横跨龙门式框架的宽度的旋转刷。
25、其中一种实施例,旋转刷是呈圆柱形的旋转刷,其中心轴与第一轴线平行或同心,并被驱动绕中心轴旋转。呈圆柱形的旋转刷具有预定长度,与待清洁的呈一排的太阳能收集器的宽度相适应。圆柱刷可由一个或多个部分组成。当刷子有多个刷段时,刷毛最好覆盖相邻两个刷段之间的接合区域。
26、另一种实施例,清洁工具包括第二个呈圆柱形的旋转刷,其中心轴与第一轴线平行并偏离第一轴线,上文所述另一个刷子绕其中心轴旋转。这样,两个清洁刷就并排排列,即在清洁方向上一前一后。
27、还可以设想其他配置的毛刷清洁工具。例如,根据另一种实施例,多个轴向旋转刷固定在横跨龙门式框架的宽度的支撑横梁上。径向电刷并排排列,以覆盖龙门式框架的宽度。每个轴向的旋转刷的旋转轴基本上垂直于支撑横梁,因此在使用中也垂直于待清洁的太阳能电池板表面。
28、刷子的刷毛/纤维由任何适合清洁太阳能电池板的材料,例如尼龙、超细纤维或塑料泡沫制成。
29、这里介绍的例子指的是清洁呈平面的太阳能电池板,因此刷子两端之间的曲率为零。然而,根据本发明,清洁机器人可以很容易地适用于清洁任何类型的太阳能收集器,例如抛物面式的呈圆柱形热能太阳能收集器,在这种情况下,刷子两端之间的外部轮廓与待清洁的太阳能收集器表面的曲率相对应,以确保刷子接触到整个待清洁的表面,从而均匀地清洁太阳能收集器。
30、在其他实施案例中,清洁工具可包括任何其他配置的刷子、刮板和/或布,这些刷子、刮板和/或布跨越龙门式框架的宽度延伸,以适配清洁太阳能收集器的表面。
31、在某些情况下,机器人还包括喷射清洗液(例如水)的装置。这些喷射装置可包括连接到龙门式框架上或直接连接到清洁工具上的喷嘴,以便向太阳能收集器喷射清洁液。在这种情况下,机器人包括一个或多个水箱、喷嘴和一个带有水泵的分配回路,水泵将水箱与喷嘴连接起来。
32、在某些可替代实施例下,线性驱动器可以采用任何合适的形状/配置来引导清洁工具;特别是,它们的杆可以指向相同或相反的方向。
33、在一些可替代实施例中,导向元件包括:将其固定在导轨上的导向部件,以及与清洁工具一端铰链连接的连接部分。致动器最好与该导向元件相连。
34、在一些可替代实施例中,导向装置还可以包括固定在框架上的执行器,例如在顶部,特别是在横向部件上,以及连接执行器和导向元件的电缆和滑轮系统,或链条或齿条系统。
35、根据本发明,清洁机器人至少包括一个距离传感器,用于确定刷子与待清洁的太阳能电池板的表面之间的距离。根据优选的实施方案,清洁机器人包括两个、四个或六个距离传感器,从而能够更精确地确定旋转刷的位置及其相对于太阳能电池板的表面的方向。距离传感器最好安装在旋转刷的支撑结构上,即靠近旋转刷本身,并在致动器的作用下与旋转刷一起移动。距离传感器通常在基本垂直的方向上测量距离,即与旋转刷的位置基本一致。
36、清洁工具的方向可由两个距离传感器控制,这两个距离传感器分别位于清洁工具的两端,用于检测呈一排的太阳能收集器的边缘区域。
37、传感器最好成对布置,一个传感器位于旋转刷的前部(相对于行进方向),一个传感器位于旋转刷的后部(相对于行进方向)。旋转刷的前部对应于旋转刷位于待清洁的表面一侧的表面,旋转刷的后部对应于旋转刷位于已清洁的表面一侧的表面。因此,机器人可以在两个方向上工作。传感器还可以检测到一排面板的末端或呈一排的面板中的各个面板之间的间隙。
38、最好在旋转刷的两端各安装一对传感器。根据要清洁的太阳能装置的类型,例如在清洁支撑传统太阳能电池板的太阳能跟踪器时,在刷子的中间位置沿旋转刷的长度方向安装第三对传感器也是有利的,这样可以检测到位于跟踪器中间(龙门式框架宽度方向)的多余厚度,从而适时地升起旋转刷。
39、在太阳能收集器系统中,成排布置的太阳能收集器不一定相互接触,因此在同一排的两个相邻电池板之间,在x方向上可以形成一个空间。控制单元被有效地配置,以便对传感器的信号进行评估,从而将该空隙识别为空隙,而不是降低旋转刷。
40、根据本发明,任何已知类型的距离传感器,特别是激光雷达型传感器、超声波发射器和探测器型传感器或照相机型传感器都可用作距离传感器。如果清洁机器人有一个以上的位置传感器,各种传感器可以相同或不同。
41、附录的从属权利要求中列出了这些和其他可能的实施方案。
- 还没有人留言评论。精彩留言会获得点赞!