一种多台压缩机并联运行的动态负荷分配控制方法与流程
1.本发明属于压缩机技术领域,涉及多台压缩机并联运行,具体涉及一种多台压缩机并联运行的动态负荷分配控制方法。
背景技术:
2.天然气长输等工艺流程中,需要根据下游用气量的大小需求调整输送气量,因此压气站均设置多台机组并联运行,以此满足工艺要求。当下游用气量发生变化时,必然会涉及到多机组并联运行负荷分配问题。为了解决多台压缩机并联运行容易出现符合分配不均、抢负荷、总管压力及流量控制不及时、互相影响扰动等问题,在保证装置及机组稳定运行的前提下,对控制方案及控制系统进行优化控制。
3.目前,相当一部分压气站采用人工判断的方式,由操作人员手动操作,进行负荷分配。还有一部分压气站做了所谓的负荷分配控制策略,但仅能适用于同一压缩机厂家的同型号多机组的等效负荷运行。
4.人工手动操作进行符合分配的方式存在精度不高、不能保证机组在高效率区域运行、且存在误操作风险。等效负荷分配不能对不同厂家、不同型号的机组进行负荷分配调节。
技术实现要素:
5.针对现有技术存在的不足,本发明的目的在于,提供了一种多台压缩机并联运行的动态负荷分配控制方法,解决现有技术中多台压缩机并联运行容易出现负荷分配不均、抢负荷、总管压力及流量控制不及时、互相影响扰动的技术问题。
6.为了解决上述技术问题,本发明采用如下技术方案予以实现:v
7.一种多台压缩机并联运行的动态负荷分配控制方法,该方法对多台压缩机并联运行系统进行动态负荷分配控制,所述的多台压缩机并联运行系统统中包括多台压缩机,每台压缩机对应一个性能控制器,多台压缩机共用一个压力主控制器;
8.该方法分为两层调节,第一层调节是通过压力主控制器对多台压缩机的长输管线的总体负荷进行出口压力或入口压力的调节;第二层调节是在第一层调节的基础上,通过性能控制器对每台压缩机的负载进行调节,使得多台压缩机的负载达到平衡。
9.具体的,该方法包括以下步骤:
10.步骤一,所述的压力主控制器的负荷分配压力调节方式分为手动调节和自动调节,在压缩机达到最小工作转速的条件下,压力主控制器投入自动调节,初始投入自动调节后将实际压力值赋值到设定值,作为初始设定值,达到无扰动切换;
11.当压力主控制器用于进行出口汇管压力调节时,压力主控制器中预先设置压力的设定值,并实时检测压力的实际值,压力主控制器进行pid调节;当设定值等于实际值时,pid输出不变;当设定值大于实际值时,pid输出增大;当设定值小于实际值时,pid输出减小;
12.当压力主控制器用于进行入口汇管压力调节时,压力主控制器中预先设置压力的设定值,并实时检测压力的实际值,压力主控制器进行pid调节;当设定值等于实际值时,pid输出不变;当设定值大于实际值时,pid输出减小;当设定值小于实际值时,pid输出增大;
13.步骤二,对压力主控制器中的既有设定值进行重新赋值时,压力主控制器对新输入的设定值做限制判断,当新输入的设定值与既有设定值的偏差大于阈值时,保持既有设定值不变;当新输入的设定值与既有设定值的偏差小于等于阈值时,新输入的设定值赋值成功;
14.步骤三,第n台压缩机运行点距防喘线的距离k
n
值计算:
15.k
n
=x
w
‑
x
s
;
16.式中:
17.x
w
为压缩机实际工作点对应的x坐标值;
18.x
s
为压缩机工作点对应的喘振点的x坐标值;
19.x坐标为等流量范围转换后的0
‑
100无量纲坐标;
20.步骤四,目标k值计算:
[0021][0022]
k表示进行负荷分配的多台压缩机的目标压缩机运行点距防喘线的距离均值:
[0023]
n表示需做负荷分配的第n台压缩机;
[0024]
步骤五,所述的第n台压缩机对应的性能控制器的距离调节方式分为手动调节和自动调节,在压缩机达到最小工作转速且第n台压缩机的负荷调节投入的条件下,性能控制器投入自动调节;
[0025]
第n台压缩机对应的性能控制器中的距离设定值sp设定为目标k值,距离实际值sv为k
n
值,性能控制器进行pid调节;
[0026]
步骤六,,对性能调节器中距离设定值sp进行重新赋值时,设置一个死区距离d;
[0027]
当k
n
与k的差值的的绝对值≤d时:sp=k
n
,性能控制器的输出值为50%;
[0028]
当k
n
与k的差值的的绝对值>d时:sp=k,其中,当k
n
>k时,性能控制器的输出值在50%~100%范围内变动,当k
n
<k时,性能控制器的输出值为0%~50%范围内变动;
[0029]
步骤七,将主调节器的输出和各压缩机对应的性能控制器的输出叠加输出为转速,将各压缩机对应的性能控制器的输出值0%~100%转换成
‑
s~s范围的数值,第n台压缩机对应的性能控制器的输出值0%~50%对应
‑
s~0范围的数值,第n台压缩机对应的性能控制器的输出值50%~100%对应0~s范围的数值;
[0030]
叠加后的输出结果为:
[0031]
当第n台压缩机处于k
n
>k的工况时,在压力调节的基础上升速;
[0032]
当第n台压缩机处于k
n
<k的工况时,在压力调节的基础上降速;
[0033]
当第n台压缩机处于k
n
=k工况时,只进行压力调节;
[0034]
对每台压缩机的负荷进行控制,最终达到负荷平衡。
[0035]
本发明还具有如下技术特征:
[0036]
步骤七中,将叠加后的输出进行速率限定:在原转速控制的基础上以限定速率逐
步调节到叠加后的目标转速,实现稳定调节
[0037]
所述的压缩机退出负荷分配的条件为下列条件之一:第一,手动退出;第二,过负荷;第三,收到停机信号;第四,转速小于最小工作转速。
[0038]
本发明与现有技术相比,具有如下技术效果:
[0039]
(ⅰ)本发明的方法对多台压缩机并联运行进行负荷分配,能够使各机组负荷均衡分配,同时保持工艺管网压力稳定。
[0040]
(ⅱ)本发明的方法在某长输天然气压气站项目上进行了验证,并进行了工艺在线运行测试,分配效果良好,切换平稳。
附图说明
[0041]
图1为电驱离心管线多台压缩机并联运行系统统的原理示意图,
[0042]
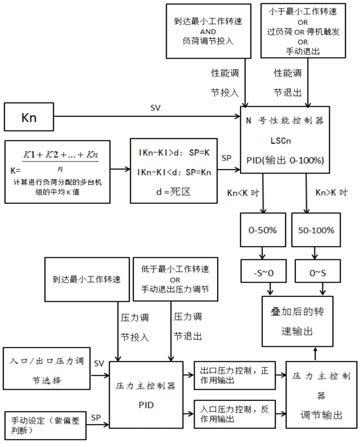
图2为本发明的多台压缩机并联运行的动态负荷分配控制方法的流程示意图。
[0043]
图3为压缩机的运行工况图。
[0044]
以下结合实施例对本发明的具体内容作进一步详细解释说明。
具体实施方式
[0045]
需要说明的是,本发明中的所有原料和设备,在没有特殊说明的情况下,均采用本领域已知的原料和设备。例如压力主控制器和性能控制器均为已知设备。
[0046]
以下给出本发明的具体实施例,需要说明的是本发明并不局限于以下具体实施例,凡在本技术技术方案基础上做的等同变换均落入本发明的保护范围。
[0047]
实施例1:
[0048]
本实施例给出一种多台压缩机并联运行的动态负荷分配控制方法,该方法对多台压缩机并联运行系统进行动态负荷分配控制,多台压缩机并联运行系统统中包括多台压缩机,每台压缩机对应一个性能控制器,多台压缩机共用一个压力主控制器;
[0049]
该方法分为两层调节,第一层调节是通过压力主控制器对多台压缩机的长输管线的总体负荷进行出口压力或入口压力的调节;第二层调节是在第一层调节的基础上,通过性能控制器对每台压缩机的负载进行调节,使得多台压缩机的负载达到平衡。
[0050]
具体的,以如图1所示的系统为例,对负荷分配控制原理进行说明。
[0051]
两台压缩机compressor1和compressor2分别代表负荷分配管网中的两台压缩机,负荷分配控制系统mcp中设置一个压力主控制器,负责调整主控工艺参数,将计算后的负荷以设定值的方式分配给各个压缩机的性能控制器。
[0052]
负荷分配控制系统mcp中分别为compressor1和compressor2配置性能控制器lsc1和lsc2,负责接收负荷分配压力主控制器的负荷设定值并通过变频器调整压缩机转速,使压缩机始终保持在压力主控制器要求的负荷。
[0053]
负荷分配控制系统mcp还为compressor1和compressor2分别配置防喘振控制器as1和as2,负责调整喘振阀门,保证机组远离喘振威胁。同时通过适当打开或关闭放喘振阀门,协助性能控制器维持负荷分配压力主控制器给定的负荷值。
[0054]
以出口汇管压力控制为例,负荷分配的控制过程中,调节动作分为两部分:
[0055]
第一部分是ms测量出口总管压力,通过其自身的pid计算输出并将结果送到各机
的性能控制器lsc1、lsc2,通过各lsc1、lsc2输出控制变频电机的转速升降,从而达到调节压缩机的总体负荷满足出口压力的调节。
[0056]
第二部分是在第一层调节的基础上,第一层调节虽然满足了排气压力的整体要求,但是各机组的负载不平衡,因此,在第一层调节的同时,每台压缩机中的喘振控制器计算各压缩机运行点距防喘线的距离k值:分别为k1、k2,经过加权平均运算,并将结果送至相应的性能控制器lsc1、lsc2中作为其pid的设定值,lsc1、lsc2中的pid调节响应再叠加到第一层调节的基础上作为总的输出去控制转速,在此种情况下,lsc1、lsc2中的pid达到平衡,也就意味着各机组的k值相等,即等距。
[0057]
实施例2:
[0058]
本实施例给出一种多台压缩机并联运行的动态负荷分配控制方法,基于实施例1中的技术方案,如图2所示,该方法包括以下步骤:
[0059]
步骤一,压力主控制器的负荷分配压力调节方式分为手动调节和自动调节,在压缩机达到最小工作转速的条件下,压力主控制器投入自动调节,初始投入自动调节后将实际压力值赋值到设定值,作为初始设定值,达到无扰动切换;
[0060]
当压力主控制器用于进行出口汇管压力调节时,压力主控制器中预先设置压力的设定值,并实时检测压力的实际值,压力主控制器进行pid调节;当设定值等于实际值时,pid输出不变;当设定值大于实际值时,pid输出增大;当设定值小于实际值时,pid输出减小;
[0061]
当压力主控制器用于进行入口汇管压力调节时,压力主控制器中预先设置压力的设定值,并实时检测压力的实际值,压力主控制器进行pid调节;当设定值等于实际值时,pid输出不变;当设定值大于实际值时,pid输出减小;当设定值小于实际值时,pid输出增大;
[0062]
步骤二,对压力主控制器中的既有设定值进行重新赋值时,压力主控制器对新输入的设定值做限制判断,当新输入的设定值与既有设定值的偏差大于阈值时,保持既有设定值不变;当新输入的设定值与既有设定值的偏差小于等于阈值时,新输入的设定值赋值成功;这样防止输错设定或设定偏差过大引起调节震荡剧烈。
[0063]
步骤三,如图3所示,第n台压缩机运行点距防喘线的距离k
n
值计算:
[0064]
k
n
=x
w
‑
x
s
;
[0065]
式中:
[0066]
x
w
为压缩机实际工作点对应的x坐标值;
[0067]
x
s
为压缩机工作点对应的喘振点的x坐标值;
[0068]
x坐标为等流量范围转换后的0
‑
100无量纲坐标;
[0069]
步骤四,目标k值计算:
[0070][0071]
k表示进行负荷分配的多台压缩机的目标压缩机运行点距防喘线的距离均值:
[0072]
n表示需做负荷分配的第n台压缩机;
[0073]
步骤五,第n台压缩机对应的性能控制器的距离调节方式分为手动调节和自动调节,在压缩机达到最小工作转速且第n台压缩机的负荷调节投入的条件下,性能控制器投入
自动调节;
[0074]
第n台压缩机对应的性能控制器中的距离设定值sp设定为目标k值,距离实际值sv为k
n
值,性能控制器进行pid调节;
[0075]
步骤六,为防止性能调节器频繁调节震荡,对性能调节器中距离设定值sp进行重新赋值时,设置一个死区距离d;
[0076]
当k
n
与k的差值的的绝对值≤d时:sp=k
n
,性能控制器的输出值为50%;
[0077]
当k
n
与k的差值的的绝对值>d时:sp=k,其中,当k
n
>k时,性能控制器的输出值在50%~100%范围内变动,当k
n
<k时,性能控制器的输出值为0%~50%范围内变动;
[0078]
步骤七,将主调节器的输出和各压缩机对应的性能控制器的输出叠加输出为转速,将各压缩机对应的性能控制器的输出值0%~100%转换成
‑
s~s范围的数值,第n台压缩机对应的性能控制器的输出值0%~50%对应
‑
s~0范围的数值,第n台压缩机对应的性能控制器的输出值50%~100%对应0~s范围的数值;
[0079]
叠加后的输出结果为:
[0080]
当第n台压缩机处于k
n
>k的工况时,在压力调节的基础上升速;
[0081]
当第n台压缩机处于k
n
<k的工况时,在压力调节的基础上降速;
[0082]
当第n台压缩机处于k
n
=k工况时,只进行压力调节;
[0083]
对每台压缩机的负荷进行控制,最终达到负荷平衡。
[0084]
本实施例中,第n台压缩机也可以称作n号压缩机,n号性能控制器指的是第n台压缩机对应的性能控制器。
[0085]
具体的,步骤七中,将叠加后的输出进行速率限定:在原转速控制的基础上以限定速率逐步调节到叠加后的目标转速,实现稳定调节。避免机组负荷变化过快。
[0086]
具体的,压缩机退出负荷分配的条件为下列条件之一:第一,手动退出;第二,过负荷;第三,收到停机信号;第四,转速小于最小工作转速。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1