一种单晶炉副室智能清洁装置及其控制方法与流程
1.本发明涉及一种清洁装置及其控制方法,具体是一种单晶炉副室智能清洁装置及其控制方法,属于多晶硅技术领域。
背景技术:
2.单晶炉副室是单晶炉的重要组成部分,主要用于容纳拉出的晶体,但是晶体在拉制的过程中,会向副室通入氩气,氩气通过副室进入到单晶炉主室的过程中,其携带的挥发物的残留物会粘附在副室中,这些残留物如不进行及时清理,则会导致晶体在拉制过程中掺杂杂质,从而降低晶体的质量。
3.为了解决上述问题,每次拉晶结束后,工作人员都会对副室进行清理,传统的方式是将无尘布缠绕在一根很长的清理杆的顶部,然后将清理杆深入到副室中,从而对副室进行清理,但这种方式有两个弊端:一是由于副室纵深较深,需要一定长度的杆子才能够对副室进行整体清理,而长度过长的杆子很难控;二是由于杆子长度过长,对杆子顶部的力较小,粘附力较大的挥发物很难清理,从而导致清洁不彻底。
4.为了解决上述问题,中国公开专利:cn212577070u一种单晶炉副室清理装置,通过在可伸缩支架上安装架体,架体外部设有清洁件,清洁件与副室内壁周缘全接触,清洁件随着可伸缩支架的伸出和缩回对副室内壁进行清理,同时通过供水管和喷头向清洁件提供清洗液,以更好的清洁副室内壁,无需人工清理,且比人工清理的更加干净。但是这种方式仍然存在以下缺陷:
5.1.清洁件吸收过多的清洗液以后,会向下滴水,从而影响了地面的洁净度;
6.2.每次清理副室的时候需要人工搬运一桶清洗液放置在副室下方,以便通过供水管和喷头向清洁件提供清洗液,清理结束后,还需要人工将盛放清洗液的桶搬运至原处,比较麻烦;
7.3.架体的大小是固定的,无法根据副室直径进行改变,使用范围较小。
技术实现要素:
8.针对上述现有技术存在的问题,本发明提供一种单晶炉副室智能清洁装置及其控制方法,智能化程度高,操作方便、简单,能够有效地避免清洗液滴落到地面,清洁更加彻底,且适用于多种直径的副室,方法简单,易于操作。
9.本发明一种单晶炉副室智能清洁装置,包括可伸缩支撑部件和储液装置,可伸缩支撑部件上部安装有用于清洗副室内壁的清洗装置,储液装置通过第一管路与清洗装置连接,第一管路上连接有抽水泵,还包括车体、控制器和电源,车体内底部固定有电机,电机上部设有转盘,电机输出轴与转盘底部圆心相连,转盘底部与电机之间至少安装有3个加强筋,加强筋第一端固定在电机轴上,其第二端固定在转盘上,加强筋第二端与转盘圆心之间的距离为d,d与转盘半径r之间的关系为:r/2<d<r;
10.可伸缩支撑部件安装在转盘上,其顶部安装有第一距离传感器,其下部套设有上
部开口的接水装置,该接水装置固定在可伸缩支撑部件上,其直径大于副室内径、且不会随着可伸缩支撑部件的伸出或缩回而上下移动,控制器和电源安装在转盘底部,储液装置和抽水泵均安装在转盘上,第一距离传感器、电机、抽水泵、电源均与控制器电连接。
11.一种单晶炉副室智能清洁装置的控制方法,具体步骤如下:
12.s1在控制器中预先设置距离值d1、d2、d3,在储液装置中装入清洗液,将清洗件固定在固定架上,通过把手将车体推到待清洁副室下部;
13.s2打开电源,控制器上电,控制器控制可伸缩支撑部件伸出,第一距离传感器检测可伸缩支撑部件与副室内壁顶部的实时距离,并传送至控制器,当第一距离传感器传送的实时距离为d1时,控制器控制可伸缩支撑部件停止伸出动作,此时,固定架上部的清洗棉紧贴副室内壁上部,对副室内壁上部进行清洗;
14.s3控制器控制电机和抽水泵工作:
15.抽水泵工作,将储液装置内部的清洗液通过第二管路送至清洗件,清洗液逐渐渗透至整个清洗件;电机带动转盘转动,转盘转动带动可伸缩支撑部件转动,可伸缩支撑部件带动第一电动伸缩杆和第二电动伸缩杆转动,对副室内壁顶部进行清洗;
16.s4控制器控制第一电动伸缩杆和第二电动伸缩杆向外伸出:
17.第一电动伸缩杆边转动边向外伸出,其端部的固定架上部的清洗件随着第一电动伸缩杆边转动边向外伸出,第一电动伸缩杆向外伸出的速度,能够保证固定架上部的清洗件对副室内壁顶部全部清洗;
18.第一电动伸缩杆和第二电动伸缩杆伸出,当第二距离传感器和第三距离传感器检测到距离障碍物的实时距离信号传送至控制器,当第二距离传感器和第三距离传感器的实时距离分别为d2和d3时,控制器控制第一电动伸缩杆和第二电动伸缩杆停止向外伸出;
19.s5控制器控制吸气装置工作:
20.吸气装置通过第三管路吸除副室内壁的杂质,随着第二电动伸缩杆的转动,清扫刷和第三管路的吸气口围绕副室内壁旋转一周,对副室内壁进行清扫,同时,清洗件随着第一电动伸缩杆的转动也围绕副室内壁侧壁旋转一周,对副室内壁侧壁进行清洗;
21.s6控制器控制可伸缩支撑部件回缩,可神作支撑部件每转动设定圈数,向下回缩设定距离,清洗件和清扫刷随着可伸缩支撑部件的转动和回缩,对整个副室内壁进行清洁;清洗和清扫过程中的废液和杂质均顺着副室内壁掉落到接水装置,接水装置中的废液、挥发物、灰尘等通过第二管路流入废液盛放装置;
22.s7当可伸缩支撑部件复位后,控制器控制抽水泵、吸气装置、电机停止工作,同时控制第一电动伸缩杆和第二电动伸缩杆复位,清洗工作结束。
23.与现有技术相比,本发明通过控制器控制各个部分工作,整个工作过程无需人工操作,实现了全自动化清洗副室内壁,自动化和智能化程度高,清洗效率高,清洁效果好。本装置结构简单,易于制造,且制造成本低。
附图说明
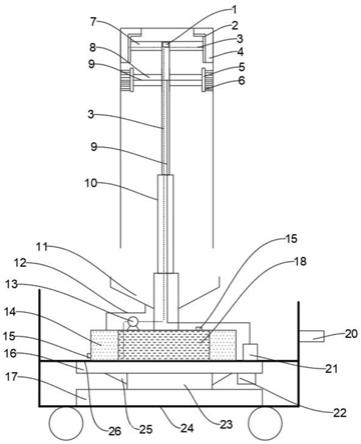
24.图1是本发明整体结构示意图;
25.图2是图1局部放大示意图;
26.图3是本发明储液装置、废液装置和可伸缩支撑部件的俯视图;
27.图4是本发明清扫装置结构示意图。
28.图中:1.第一距离传感器,2.固定架,3.第一管路,4.清洗件,5.支架,6.清扫刷,7.第一电动伸缩杆,8.第二电动伸缩杆,9.第三管路,10.可伸缩支撑部件,11.接水装置,12.第二管路,13.抽水泵,14.废液盛放装置,15.密封盖,16.转盘,17.电机,18.储液装置,20.把手,21.吸气装置,22.控制器,23.电机输出轴,24.车体,25.加强筋,26.隔板。
具体实施方式
29.下面结合附图对本发明作进一步说明。
30.如图1和图2所示,本发明一种单晶炉副室智能清洁装置,包括车体24,车体24内安装有电机17,电机17固定在车体24内底部,电机17上部设有转盘16,电机输出轴23与转盘16底部圆心相连,转盘16底部与电机17之间安装有加强筋25,加强筋25第一端固定在电机17轴上,其第二端固定在转盘16上,加强筋25第二端与转盘16圆心之间的距离为d,d与转盘16半径r之间的关系为:r/2<d<r,加强筋25至少设置3个,之所以这样设置,是为了增加电机输出轴23对转盘16的支撑的面积,有效地防止了转盘16倾翻,保证了转盘16转动过程中的稳定性;
31.转盘16上安装有储液装置18和可伸缩支撑部件10,可伸缩支撑部件10上部用于清洗副室内壁的清洗装置18,可伸缩支撑部件10下部套设有上部开口的接水装置11,接水装置11固定在可伸缩支撑部件10上,其上部开口直径大于副室内壁内径,且不会随着开可伸缩支撑部件10的伸出或缩回而上下移动;储液装置18通过第一管路3与清洗装置连接,第一管路3上连接有抽水泵13,抽水泵13安装在储液装置18上部,还包括安装在可伸缩支撑部件10顶部的第一距离传感器1,安装在转盘16底部的控制器22和电源(图中未显示),第一距离传感器1、电机17、抽水泵13、电源与控制器22电连接。
32.作为一种优选方式,本发明清洗装置18包括至少两个第一电动伸缩杆7,本发明优选设置6个第一电动伸缩干7,清洗更加彻底,第一电动伸缩杆7一端安装在可伸缩支撑部件10上,另一端安装有固定架2,固定架2为“7”字型结构,其内侧(靠近可伸缩支撑部件的一侧为“内侧”,远离可伸缩支撑部件10的一侧为“外侧”)安装有第三距离传感器(图中未显示),其外侧固定有清洗件4,清洗件4可以是无尘布或海绵,用于清洗副室内壁;第一管路3出液口固定在固定架2外侧,其进液口位于在清洗装置18底部;第一电动伸缩杆7、第三距离传感器与控制器22电连接;在清洗副室内壁时,启动抽水泵13,抽水泵13通过第一管路3将储液装置18中的清洗液送至无尘布或海绵,无尘布或海绵吸收清洗液后对副室内壁进行清理,清理的更加彻底。
33.作为一种优选方式,为了防止接水装置11中的水满溢出,本发明还设有废液盛放装置14,安装在转盘16上,废液盛放装置14进液口通过第二管路12与接水装置11底部出液口连接。
34.作为一种优选方式,储液装置18和废液盛放装置14均为密封结构,该结构有效地保证了在转动过程中,储液装置18和废液盛放装置14内部的水不会因为离心力的原因被甩出装置外部,从而保证了工作场地的清洁。储液装置18和废液盛放装置14均由透明材料制造而成,便于工作人员观察到装置内部清洗液及废液的情况,从而判断是否需要向储液装置18内部添加干净清洗液,或释放废液盛放装置14中的废液,透明材料可根据需要选用透
明塑料或玻璃,也可选择其他满足条件的透明材料。储液装置18上部开设有进液口,废液盛放装置14侧壁下部开设有出液口,储液装置18的进液口和废液盛放装置14的出液口均通过密封盖15密封。
35.作为一种优选方式,为了便于给储液装置18添加清洗液,为了便于清洗结束后放空废液盛放装置14中的废液,储液装置18上部开设有进液口,废液盛放装置14侧壁下部开设有出液口,储液装置18的进液口和废液盛放装置14的出液口均通过密封盖15密封。
36.如图3所示,作为一种优选方式,本发明储液装置18、废液盛放装置14以及可伸缩支撑部件10均为圆柱形,储液装置18和废液盛放装置14高度相等;储液装置18置于废液盛放装置14内部,其内径是废液盛放装置14内径的1/3-1/2;可伸缩支撑部件10固定安装在储液装置18上部,储液装置18、废液盛放装置14、可伸缩支撑部件10同轴设置。之所以这样设置,是因为储液装置18和废液盛放装置14在转盘16上占据较大面积,且均匀分布在转盘16上,有利于转盘16的平衡性,转动过程中更加稳定,当然,在保证转盘16平衡性和稳定性的前提下,储液装置18和废液盛放装置14也可以是其他形状。
37.如图4所示,作为一种优选方式,本发明还包括清扫装置,还包括清扫装置,该清扫装置包括至少两个第二电动伸缩杆8、吸气装置21和第三管路9,第二电动伸缩杆8位于第一电动伸缩杆7下部,其一端固定在可伸缩支撑部件10上部,其另一端安装有支架5,支架5外侧边缘处均布有清扫刷6,支架5上安装有第二距离传感器,第二距离传感器、吸气装置21、第二电动伸缩杆8分别与控制器22相连;第三管路9吸气口固定在支架5外侧,其出气口连接吸气装置21的进气口,吸气装置21安装在废液盛放装置14上部或转盘16上。本发明优选设置6个第二电动伸缩杆8,本发明清扫刷6有效地扫除了粘附在副室内壁的挥发物、灰尘、杂质等,同时吸气装置21产生强大的气体,并通过第三管路9的吸气口有效地将粘附在副室内壁的挥发物、灰尘、杂质。
38.作为一种优选方式,为了更加彻底的吸除副室内壁上的挥发物等杂质,本发明第三管路9的出气口直径由内向外逐渐增大呈圆锥状。为了便于废液的流入到的废液盛放装置14中,减少废液在接水装置11中的残留,接水装置11底部呈漏斗状,其上部开口直径大于下部开口直径。为了防止废液顺着接水装置11底部与可伸缩支撑部件10之间的间隙流出,增加二者之间的密封性,接水装置11与可伸缩支撑部件10接触部分通过密封圈密封。
39.作为一种优选方式,为了便于车辆移动,在车体24一侧安装把手20,用于推动车辆移动。进一步,为了提高车辆使用的安全性,车体24内部安装有隔板26,隔板26长宽与车体24底板相同,隔板26中间开设有与转盘16直径相同的通孔,便于转盘16转动。
40.作为一种优选方式,可伸缩支撑部件10为电动伸缩杆,与控制器22电连接。当然,也可根据需要选择气缸控制可伸缩支撑部件10伸出或缩回,气缸安装在转盘16上,气缸与控制器22电连接,控制器22通过控制气缸的工作状态,从而控制可伸缩支撑部件10伸出或回缩。但本发明选择电动伸缩杆作为可伸缩支撑部件10,直接通过控制器22驱动可伸缩支撑部件10即可,结构更加简单,便于控制。
41.作为一种优选方式,为了使本装置的外观看起来更加美观,本发明可伸缩支撑部件10、第一电动伸缩杆7、第三电动伸缩杆均为空心结构,第一管路3位于可伸缩支撑部件10和第二电动伸缩杆8内部,第三管路9位于可伸缩支撑部件10和第一电动伸缩杆7内部。
42.为了减少导线的使用使装置更加美观,本发明还可设置无线接收模块,上述所述
距离传感器和障碍物检测传感器也可内置有无线发射模块,距离传感器和障碍物检测传感器通过无线发射模块将信号发送至无线接收模块,无线接收模块再将接收到的信号传送至控制器22,控制器22可采用stm32系列的单片机,数据运算速度快,且体积小巧,距离传感器可采用超声波传感器、红外传感器等市面上常用的测距传感器。
43.本装置初始状态,可伸缩支撑杆10、第一电动伸缩杆7和第二电动伸缩杆8均为回缩状态,具体控制方法如下:
44.s1在控制器22中预先设置距离值d1、d2、d3,在储液装置18中装入清洗液,将清洗件4固定在固定架2上,清洗液选用酒精,清洗件4选用清洗棉,工作人员通过把手20将本装置推到待清洁副室下部;
45.s2打开电源,启动本装置,控制器22控制可伸缩支撑部件10伸出,第一距离传感器1检测可伸缩支撑部件10与副室内壁顶部的实时距离,并传送至控制器22,当第一距离传感器1传送的实时距离为d1时,控制器22控制可伸缩支撑部件10停止伸出动作,此时,固定架2上部的清洗棉紧贴副室内壁上部,对副室内壁上部进行清洗;
46.s3控制器22控制电机17和抽水泵13工作:
47.抽水泵13工作,将储液装置18内部的酒精通过第二管路12送至清洗棉,清洗液逐渐渗透至整个清洗棉;电机17带动转盘16转动,转盘16转动带动可伸缩支撑部件10转动,可伸缩支撑部件10带动第一电动伸缩杆7和第二电动伸缩杆8转动,对副室内壁顶部进行清洗;
48.s4控制器22控制第一电动伸缩杆7和第二电动伸缩杆8缓慢向外伸出:
49.第一电动伸缩杆7边转动边向外伸出,其端部的固定架2上部的清洗棉随着第一电动伸缩杆7边转动边向外伸出,从而实现了对副室内壁上部的清洗,第一电动伸缩杆7向外伸出的速度,需保证固定架2上部的清洗棉能够对副室内壁顶部全部清洗。
50.第一电动伸缩杆7和第二电动伸缩杆8伸出,当第二距离传感器和第三距离传感器检测到距离障碍物的实时距离信号传送至控制器22,当第二距离传感器和第三距离传感器的实时距离分别为d2和d3时,控制器22控制第一电动伸缩杆7和第二电动伸缩杆8停止向外伸出,此时清扫刷6和清洗棉刚好与副室内壁紧密贴合,且具有一定压力,便于更好的清洗副室内壁;
51.s5控制器22控制吸气装置21工作:
52.吸气装置21通过第三管路9吸除副室内壁的杂质,与清扫刷6配合将副室内壁粘附的挥发物、灰尘等杂质清除干净,随着第二电动伸缩杆8的转动,清扫刷6和第三管路9的吸气口围绕副室内壁旋转一周,对副室内壁进行清扫,同时,清洗棉随着第一电动伸缩杆7的转动也围绕副室内壁侧壁旋转一周,对副室内壁侧壁进行清洗;
53.s6控制器22控制可伸缩支撑部件10回缩,回缩的速度可根据实际清理的副室内壁的直径设置,回缩速度必须保证清洗棉和清扫刷6在同一高度转动2-3圈,副室内壁直径越大回缩速度越慢,清洗棉和清扫刷6随着可伸缩支撑部件10的回缩缓慢的向下移动直至可伸缩支撑部件10复位,从而实现了对整个副室内壁的清洁,由于清扫刷6位于清洗棉的下部,可伸缩支撑部件10由上向下运动,因此在实际工作中,对于副室内壁的侧壁来讲,清扫刷6先对侧壁进行清扫,然后清洗棉再对清扫过的侧壁进行清洗,这样的组合方式,增加了对副室内壁的清洁力度,清洁效果更好,清洁的更加彻底。清洗和清扫过程中的废液、挥发
物、灰尘等均顺着副室内壁掉落到接水装置11,接水装置11中的废液、挥发物、灰尘等通过第二管路12流入废液盛放装置14;
54.s7当可伸缩支撑部件10复位后,控制器22控制抽水泵13、吸气装置21、电机17停止工作,同时控制第一电动伸缩杆7和第二电动伸缩杆8复位,清洗工作结束。工作人员可将本装置移动到排放废液排放处,将废液盛放装置14中的废液排放干净,然后对废液盛放装置14和接水装置11内部用清水冲洗干净,以延长本装置的使用寿命,由于废液盛放装置14由透明塑料制造而成,因此,在清洗过程中工作人员通过肉眼即可判断废液装置14是否清洗干净。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1