管道内部清理机器人的制作方法
本技术涉及专用工具领域,特别是涉及管道内部清理机器人。
背景技术:
1、管道通常具有圆筒形状,管道在长期使用后,管道的内壁部存在异物,包括但不限于铁屑、结晶及附着物等,需要进行清理。
2、传统的圆型管道清洗机器人,不能径向调节进给,仅适用于无变化的管道,而且在实际清理中,有与地面水平的管道,有与地面垂直或者成一定角度的管道,还有弯管,此外管道中还可能有凸起,导致传统的管道清理作业机器人难以完成清理工作。
技术实现思路
1、基于此,有必要提供一种管道内部清理机器人。
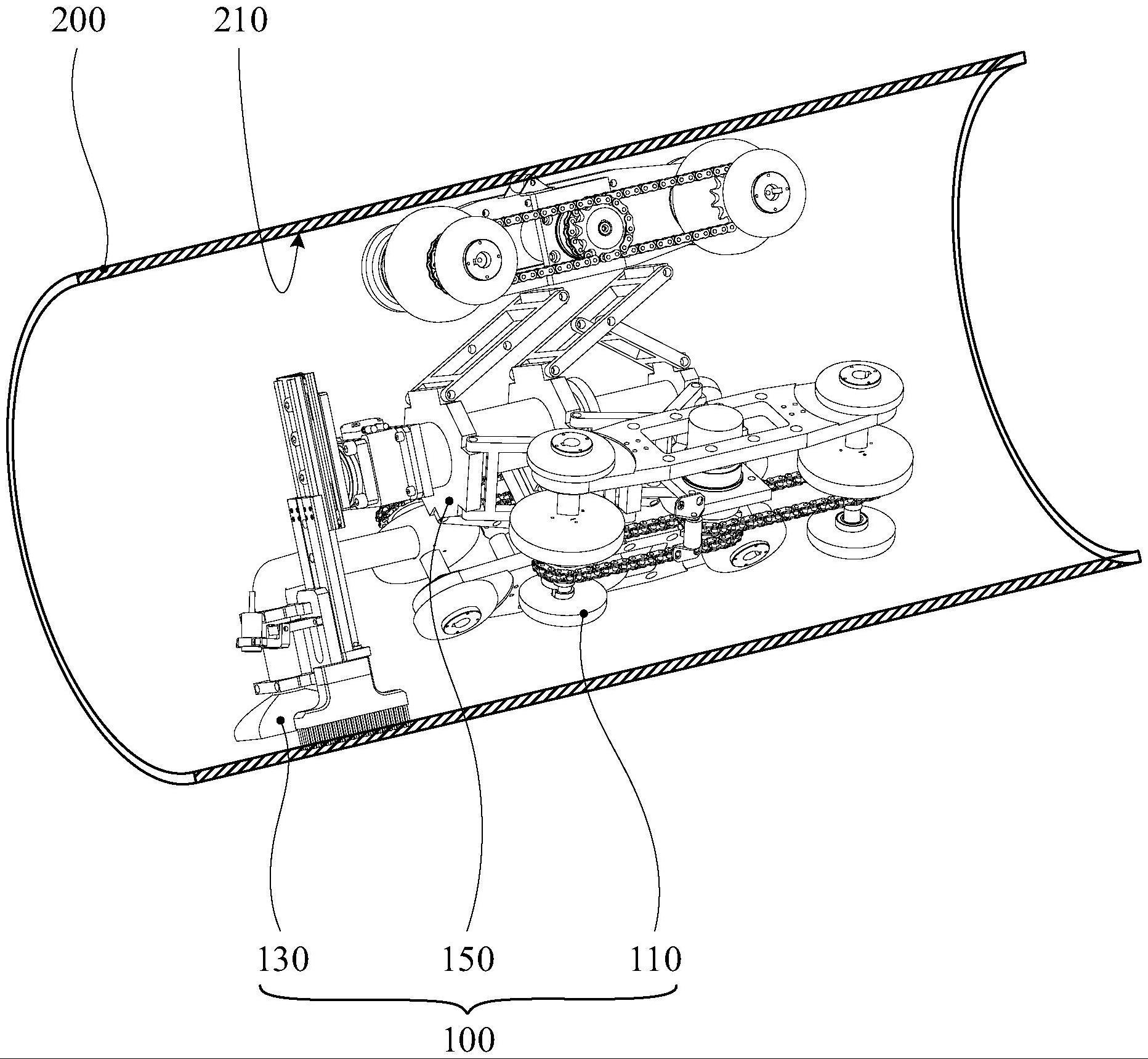
2、在一个实施例中,一种管道内部清理机器人,其包括驱动模块、清理模块及中间支撑模块;
3、所述中间支撑模块设有压力感应装置;
4、所述驱动模块可升降地安装于所述中间支撑模块上且与所述压力感应装置抵接,所述中间支撑模块根据所述压力感应装置调整所述驱动模块的位置,以使所述驱动模块对待清理管道的内壁部具有第一压力位置及第二压力位置;
5、所述驱动模块用于在所述第一压力位置可沿所述内壁部移动,以带动所述中间支撑模块移动,及在所述第二压力位置压接所述内壁部,以保持所述中间支撑模块的位置;
6、所述清理模块可转动地安装于所述中间支撑模块上,用于清理所述内壁部。
7、上述管道内部清理机器人,一方面通过驱动模块可升降安装以变径方式,实现了径向调节进给,适用于各种直径及各种形状的管道,还可配合实现无人化的管道内部自动清理工作;另一方面第一压力位置及第二压力位置的设计,有利于实现管道内部清理机器人沿管道内部移动,以及停下来进行清理工作;再一方面清理模块可根据需求及管道内部清理对象进行调整或更换,从而可以适应更为广泛的管道清理需求。
8、在其中一个实施例中,所述中间支撑模块还设有连接座及升降支撑结构;
9、所述清理模块及所述升降支撑结构分别安装于所述连接座上;
10、所述压力感应装置安装于所述升降支撑结构上,所述驱动模块安装于所述升降支撑结构上,用于通过调整所述升降支撑结构的升降位置,以使所述驱动模块对所述内壁部具有第一压力位置及第二压力位置。
11、在其中一个实施例中,所述中间支撑模块还设有电缸及连接板;
12、所述连接板固定于所述电缸的活塞杆上,所述升降支撑结构还安装于所述连接板上;
13、所述电缸与所述连接座相固定,所述电缸通过所述活塞杆调整所述升降支撑结构的升降位置,用于使所述驱动模块远离所述内壁部以处于所述第一压力位置,或接近所述内壁部以处于所述第二压力位置。
14、进一步地,在其中一个实施例中,所述升降支撑结构为剪叉结构,所述电缸通过所述活塞杆调整所述剪叉结构的剪叉形态,进一步地,在其中一个实施例中,所述电缸通过所述活塞杆调整所述剪叉结构的剪叉杆相对靠近或者相对远离,以驱动所述剪叉结构的整体高度增加或者整体高度降低。
15、在其中一个实施例中,所述升降支撑结构包括长连杆及短连杆,所述短连杆一端转动连接所述长连杆的中部,另一端转动连接所述连接板,所述长连杆一端转动连接所述连接座,另一端转动连接所述驱动模块;
16、所述连接座的数量为两个,所述电缸分别与两个所述连接座相固定;
17、所述升降支撑结构还包括从动支撑结构,所述从动支撑结构一端转动连接其中一个所述连接座,另一端转动连接所述驱动模块,所述长连杆连接另一个所述连接座;或者,
18、所述压力感应装置包括压力传感器及位移传感器,所述升降支撑结构转轴连接所述活塞杆,且所述压力传感器安装于所述转轴上,所述位移传感器安装于所述升降支撑结构与所述活塞杆的连接位置处;或者,
19、所述中间支撑模块还设有安装座,所述安装座固定于所述连接座上,所述清理模块可转动地安装于所述安装座上。
20、在其中一个实施例中,所述电缸固定于两个所述连接座上,或者两个所述连接座分别固定于所述电缸上。进一步地,在其中一个实施例中,所述从动支撑结构亦为长连杆。
21、在其中一个实施例中,所述清理模块设有旋转装置、纵移滑轨及清理组件;
22、所述旋转装置安装于所述中间支撑模块上,所述纵移滑轨安装于所述旋转装置上,所述清理组件安装于所述纵移滑轨上;
23、所述旋转装置用于带动所述纵移滑轨转动,所述清理组件用于在所述纵移滑轨上移动及用于清理所述内壁部。
24、在其中一个实施例中,所述清理组件包括吸尘装置及清扫装置,所述清扫装置的清扫方向邻近所述吸尘装置,以使所述吸尘装置收集清扫对象;或者,
25、所述旋转装置用于带动所述纵移滑轨往复转动;或者,
26、所述纵移滑轨用于带动所述清理组件沿径向往复移动;或者,
27、所述清理模块还设有基座,所述基座固定于所述中间支撑模块上,所述旋转装置安装于所述基座上。
28、在其中一个实施例中,所述清理模块还设有摄像头,所述摄像头安装于所述纵移滑轨上,所述中间支撑模块的连接座或安装座上,或者所述清理模块的基座上;
29、所述管道内部清理机器人还包括与所述摄像头信号连接的传输模块,所述传输模块安装于所述纵移滑轨上,所述中间支撑模块的连接座或安装座上,或者所述清理模块的基座上;
30、所述管道内部清理机器人还包括视觉照明装置,所述视觉照明装置安装于所述中间支撑模块上,且邻近所述清理模块。
31、在其中一个实施例中,所述驱动模块包括主体框架、驱动电机及驱动轮;
32、所述主体框架安装于所述中间支撑模块上且与所述压力感应装置抵接;
33、所述驱动轮转动安装于所述主体框架上,所述驱动电机固定于所述主体框架上,且所述驱动电机与所述驱动轮驱动连接;
34、所述中间支撑模块根据所述压力感应装置调整所述主体框架的位置,以使所述驱动轮对所述内壁部具有所述第一压力位置及所述第二压力位置;
35、所述驱动轮在所述第一压力位置,可被所述驱动电机驱动而沿所述内壁部移动;
36、所述驱动轮在所述第二压力位置压接所述内壁部,以保持所述中间支撑模块的位置。
37、在其中一个实施例中,所述驱动模块还包括双排链轮、两根链条及两个单链轮;
38、所述驱动电机的输出端与所述双排链轮相固定;
39、所述驱动轮的数量为两个,每个所述驱动轮与一个所述单链轮相固定;
40、所述双排链轮分别通过两根所述链条与两个所述单链轮相连接;或者,
41、所述驱动轮的两侧分别同轴可转动地设置一个防撞轮;或者,
42、所述驱动模块还包括可转动地设置于所述主体框架上的辅助轮,所述辅助轮邻近所述驱动电机且远离所述中间支撑模块设置。
43、进一步地,在其中一个实施例中,所述驱动轮在所述第二压力位置,所述辅助轮压接所述内壁部,以保持所述中间支撑模块的位置。
44、在其中一个实施例中,所述驱动模块整体呈圆筒形或圆环形;或者,所述驱动模块的数量为至少二个且各所述驱动模块相对于所述中间支撑模块均匀设置,以使各所述驱动模块相对于所述待清理管道的轴线均匀设置。
- 还没有人留言评论。精彩留言会获得点赞!