一种羽毛球收集分类回收机器人
1.本发明涉及体育器材领域的一种机器人,特别涉及一种羽毛球收集分类回收机器人。
背景技术:
2.羽毛球是一项室内室外兼顾的运动,是我国的传统优势体育项目之一,深受人们喜爱。伴随着全民健身计划的实行,越来越多的人参与到羽毛球运动中来,推动着大众羽毛球运功的快速发展。
3.在打羽毛球的过程中,产生了大量的羽毛球急需快速回收,导致迫切需要设计羽毛球的自动收集分类回收机器人的研究。现有技术中,目前研制的球类回收机器人多为人为操控或基于路径规划的遍历捡取,较为费时费力,且主要的回收对象是高尔夫球、网球或乒乓球等规则球形物体的捡拾机器人,而羽毛球由于具有不规则性和易折损性,使其较难采用机器进行全自动的回收。总得来说,羽毛球运动会产生大量的羽毛球需要回收,现有的羽毛球机器人收集装置效率不高,不能准确检测分类出合格与不合格的羽毛球,回收效率低。
技术实现要素:
4.本发明针对现有产品存在的不足,提出了一种羽毛球收集分类回收机器人,实现了对羽毛球的准确识别、自动收集,准确分类和回收再利用。
5.本发明的有益效果:一种羽毛球收集分类回收机器人,包括架体、控制器、图像识别机构、收集机构、检测机构、下球机构、球箱机构及运动机构,所述控制器分别与图像识别机构、收集机构、检测机构、下球机构及运动机构电信号连接;所述图像识别机构设置在架体前端位置,用于自动识别羽毛球和障碍物;所述收集机构设置在架体,用于对羽毛球进行自动收集;所述检测机构设置在收集机构下方,用于对收集的羽毛球依次自动检测;所述下球机构设置在检测机构一侧,用于对检测后的羽毛球自动分拣;所述球箱机构设置在下球机构一侧,用于对分拣的羽毛球进行收集,所述运动机构设置在架体侧部,用于带动架体进行全方位移动。
6.进一步的,所述架体包括底板、外壳及支撑架,所述外壳及支撑架均安装在底板上。
7.进一步的,所述控制器固定在底板上,且控制器位于检测机构旋转盘与运输带之间,所述控制器内部包含可充电电源。
8.进一步的,所述图像识别机构包括摄像头及折板,所述摄像头安装在折板上,折板安装在外壳上。
9.进一步的,所述收集机构包括捡球转盘、运输带及接料斗;所述捡球转盘安装在底板的前方,所述运输带安装在底板上,且位于捡球转盘的后方,所述接料斗与支撑架相连接,且位于运输带顶端的下方。
10.进一步的,所述检测机构包括光源、相机、旋转盘、重力传感器及圆筒;所述旋转盘水平连接在底板上,所述重力传感器水平放在旋转盘上,所述圆筒设置在重力传感器上,并与重力传感器相连接,且所述圆筒直径大于羽毛球球头的直径,所述光源及相机设置在支撑架的下方。
11.进一步的,所述下球机构包括气缸、真空吸头、旋转轴及摇臂;所述气缸在底板上,所述真空吸头连接在摇臂上,所述真空吸头位于检测机构的旋转盘上方并与圆筒位置相对应。
12.进一步的,所述球箱机构包括合格羽毛球收集桶、不合格羽毛球收集桶及球箱,所述合格羽毛球收集桶及不合格羽毛球收集桶分别设置在球箱内,所述球箱放置在底板上方。
13.进一步的,所述运动机构包括动力电机及车轮,四组所述动力电机分别两侧对称安装于底板的上方,每组动力电机的输出轴水平穿出外壳同轴固连车轮。
14.本发明的有益效果如下:1)本发明实现了羽毛球从识别、收集、检测和分类的完整过程,整个过程实现了全自动,通过采集图像并识别,避免了将不必要的杂物收入,同时实现了避障功能。通过检测机构,分类出合格和不合格的羽毛球。
15.2)本发明实现了羽毛球队全自动收集、检测和分类,并且收集过程准确高效,收集范围广,检测效率高,减少了人们的体力和时间的消耗,也减少了羽毛球的消耗,降低了打球成本,可推广应用。
附图说明
16.图1为本发明的整体结构示意图;图2为本发明图像识别机构的结构示意图;图3为本发明收集机构的结构示意图;图4为本发明检测机构的结构示意图;图5为本发明下球机构的结构示意图;图6为本发明运动机构的结构示意图;图中:1、架体;2、控制器;3、图像识别机构;4、收集机构;5、检测机构;6、下球机构;7、球箱机构;8、运动机构;9、折板;10、摄像头;11、接料斗;12、运输带;13、捡球转盘;14、相机;15、光源;16、圆筒;17、重力传感器;18、旋转盘;19、球箱;20、合格羽毛球收集桶;21、不合格羽毛球收集桶;22、气缸;23、旋转轴;24、摇臂;25、真空吸头;26、外壳;27、支撑架;28、底板;29、动力电机;30、车轮。
具体实施方式
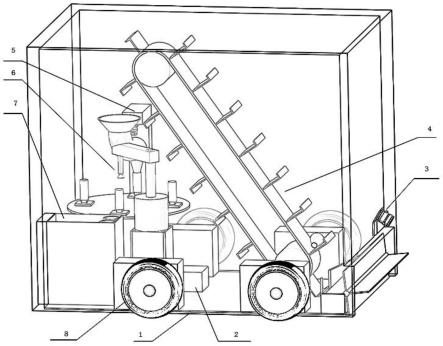
17.下面结合附图1-6对本发明所述的羽毛球收集检测回收机器人作进一步的详细描述:如图1所示,羽毛球收集检测回收机器人包括架体1、控制器2、图像识别机构3、收集机构4、检测机构5、下球机构6、球箱机构7和运动机构8。其中控制器2、图像识别机构3、收集机构4、检测机构5、下球机构6、球箱机构7和运动机构8均安装在架体1上。
18.如图2所示,图像识别机构3包括摄像头10和30度折板9,摄像头10安装在30度折板上,30度折板安装在外壳26上,位于捡球转盘13 的上方。
19.如图3所示,收集机构4包括捡球转盘13、运输带12和接料斗11。捡球转盘13安装在底板的前方,用于收集地上的羽毛球。运输带12安装在底板28上,位于捡球转盘13的后方,用于运输捡球转盘13收集来的羽毛球。接料斗11与支撑架27相连接,位于运输带12顶端的下方,用于接住运输带12上的羽毛球并将羽毛球运到旋转盘18的圆筒16上。运输带12倾斜设置,且运输带12上均匀设置一组挡板,防止羽毛球在重力作用下掉落。
20.如图4所示,检测机构5包括光源15、相机14、旋转盘18、重力传感器17和圆筒16。其中,旋转盘18水平连接在底板28上,旋转盘18可在底板28上保持水平方向的转动,旋转盘18旋转的速度与运输带12运输的速度相对应,使每个圆筒16都能接到相应的羽毛球。旋转盘18的上方对称分布着4个重力传感器17,每个重力传感器17上面安装一个圆筒16。光源15和相机14安装在支撑架27上,位于圆筒16的上方。当圆筒16接到从接料斗11出来的羽毛球时,光源15会给相机14提供照明,相机14可对圆筒16上的待检测羽毛球进行拍照检查,检查羽毛球的羽毛是否整齐,并将信号传递给控制器2。同时重力传感器17对圆筒16上的羽毛球进行重量测量并将数据传给控制器2。
21.如图5所示,下球机构6包括真空吸头25、气缸22、旋转轴23和摇臂24。下球机构6负责将检测后的羽毛球进行自动分类拣出,归类汇总后完成全自动状态下的羽毛球检测和分类。其中真空吸头25安装在摇臂24上,真空吸头25用于吸取出已检测的羽毛球。气缸22水平安装在底板28上。圆筒16上已检测的羽毛球经真空吸头25吸出,合格的羽毛球会被旋转放到球箱机构7的合格羽毛球收集桶20,不合格的羽毛球会被旋转放到球箱机构7的不合格羽毛球收集桶21,合格羽毛球收集桶20和不合格羽毛球收集桶21放置在球箱19内,球箱19放置在底板28上,可相对底板28移动抽出。
22.如图6所示,运动机构8包括4个动力电机29和4个车轮30。4个动力电机29对称分布在底板28上,每个动力电机29连接着一个车轮30.从而带动整个羽毛球收集检测回收机器人全方位的移动。
23.以下是本发明的具体工作过程,对本发明的原理做进一步的描述,工作过程包括以下步骤:1)在羽毛球收集检测回收机器人运行时,摄像头10能够采集到机器人周围的图像,采集到的图像信号被传输到控制器2进行识别,控制器2能够识别羽毛球和障碍物。
24.2)当控制器2识别到羽毛球时,控制器2会控制运动机构8向羽毛球所在的方位移动,若识别到障碍物,控制器2会控制运动机构8主动避开。当两个动力电机29的转动方向相反时,实现原地左转或原地右转,当两个动力电机29的转向相同时,实现前进或后退,以此方式实现了乒乓球收集机器人的全方位灵活移动。
25.3)当机器人运动到羽毛球旁边,捡球转盘13转动将羽毛球转到机器人内部,再经过运输带12和接料斗11,羽毛球精准落到圆筒16上。
26.4)圆筒16接到从接料斗11出来的羽毛球时,光源15会给相机14提供照明,相机14可对圆筒16上的待检测羽毛球进行拍照检查,检查羽毛球的羽毛是否整齐,并将信号传递给控制器2。同时重力传感器17对圆筒16上的羽毛球进行重量测量并将数据传给控制器2。
27.5)旋转盘18转动,真空吸头25用于吸取出已检测的羽毛球。合格的羽毛球会被旋
转放到合格羽毛球收集桶20,不合格的羽毛球会被旋转放到不合格羽毛球收集桶21,以此往复,当羽毛球收集检测回收机器人电量过低,会自动回到系统设定位置充电。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1