1.本发明涉及涡轮机的领域,并且更具体地,涉及一种用于从涡轮机的附件齿轮箱驱动涡轮机的整体式发电机的装置。本发明还涉及一种用于调节涡轮机的整体式发电机的速度的方法。
背景技术:2.背景技术特别包括文献fr3062421a1、ep2216530a2、ep2216530a3和ep2696058a1。
3.以已知的方式,安装在飞行器上的涡轮机配备有整体式驱动发电机(integrated drive generator,idg),该整体式驱动发电机被构造为以恒定频率输送电功率,例如,以400hz的三相交流电流提供115v的电功率。
4.发电机被设计为通过使发电机的输出轴以不同的速度旋转来接收机械能,并且将该机械能转化为电能。通常,发电机是由涡轮机上的附件齿轮箱(accessory gear box,agb)的输出轴驱动。因此,发电机的输入轴的旋转速度与附件齿轮箱的输出速度通过固定的减速比与涡轮机的可变速度相关联。为了获得恒定的频率,发电机必须以恒定的速度驱动。
5.为此,可以在附件齿轮箱的输出轴和发电机的输入轴之间安装速度控制装置,以保持发电机的旋转轴杆的恒定速度。
6.特别地,以恒定频率输送电功率的发电机通常配备有液压机械差动装置,以确保对发电机的恒定速度的控制。
7.速度控制装置通常由固定排量的液压马达组成。液压马达的速度由压力控制回路控制。液压功率的传递是通过可变排量的液压马达实现的,在液压马达中,调节排量以确保两个设备之间的流量守恒。对于压力调节,液压系统配备有耗散压力调节器。
8.然而,从附件齿轮箱释放的机械功率不等于由发电机输送的功率。
9.此外,液压机械装置具有缺点。特别地,由于内部泄漏和摩擦,固定或可变排量的液压马达的总体效率很低,并且特别是接近80%。此外,在对可变排量的液压马达进行控制的液压装置处存在压力损耗,并且在对固定排量的液压马达的速度进行控制的压力调节器处存在耗散损耗。此外,在两个象限中的可逆运行(正速度和负速度,马达/发电机)使得效率方面不能够优化,因此效率低于80%。该液压机械装置也是不可靠的,因为调节发电机的速度涉及使液压马达在很宽的速度范围内运行。因此,在低速或高速下,效率受到影响,并且受到磨损的风险更大。
10.本发明的目的是提出一种解决方案,使得能够弥补这些缺点中的至少一些缺点。
技术实现要素:11.为此,本发明涉及一种用于从涡轮机的附件齿轮箱的输出轴驱动飞行器涡轮机的整体式发电机的输入轴的装置,其特征在于,驱动装置包括:
[0012]-第一电动马达和第二电动马达,
[0013]-控制构件,控制构件被构造为控制所述第一电动马达和所述第二电动马达,所述第一电动马达和所述第二电动马达被布置为将电功率从一个电动马达传递到另一个电动马达传递,以及
[0014]-周转式减速齿轮系,周转式减速齿轮系包括三个元件:中心的行星式齿轮装置、外齿圈和行星架,周转式减速齿轮系的行星齿轮与所述行星式齿轮装置和所述齿圈啮合,所述三个元件能够围绕齿轮箱的轴杆旋转,所述三个元件中的第一元件用于联接到附件齿轮箱的输出轴,所述三个元件中的第二元件用于联接到发电机的输入轴,所述三个元件中的第三元件由所述第一电动马达驱动旋转,
[0015]
并且其中,所述控制构件被构造为改变所述三个元件中的第三元件的旋转速度,以便以恒定的速度驱动所述三个元件中的第二元件旋转。
[0016]
由于整体式发电机的输入轴的旋转速度通常是可变的,为了将发电机的输出速度调节为恒定值,驱动装置包括周转式减速齿轮系,以包含额外的适应程度。通过周转式减速齿轮系的传动使得由附件齿轮箱驱动的轴能够连接到发电机和第一电动马达,从而将发电机的速度调节为恒定值。周转式减速齿轮系充当差动器,并且使得能够连接这三个设备并且能够调节发电机的输入轴的速度。
[0017]
因此,控制第一电动马达的速度使得能够针对附件齿轮箱侧的输入速度来确保发电机的恒定输出速度。
[0018]
第二电动马达使得能够确保将电功率传递到第一电动马达。
[0019]
有利地,根据本发明的驱动装置是纯电的,并且结合了第一电动马达和第二电动马达之间的电功率传递,这使得能够消除根据现有技术的驱动装置中存在的耗散损耗。
[0020]
有利地,发电机的输出速度保持恒定,而不从涡轮机的附件齿轮箱的输出轴汲取额外的功率。因此,从附件齿轮箱的输出轴释放的功率被完全地转换为电功率。
[0021]
根据本发明的驱动装置使得能够在两个象限中工作,而在电动马达的效率方面没有任何影响。
[0022]
此外,驱动装置是可靠的,特别是由于电动马达的冗余,与根据现有技术的装置不同,在现有技术中液压冗余在技术上是不可想象的。
[0023]
此外,由于驱动装置不像现有技术包括压力调节装置或位移调节装置,因此装置的部件的数量受到限制。
[0024]
第一电动马达可以是适于在没有与第二电动马达进行功率传递的情况下运行的马达/发电机。特别地,第一电动马达可以配备有电池。
[0025]
优选地,第一电动马达和第二电动马达是异步的。
[0026]
驱动装置可以包括至少一个可逆的功率转换器,该至少一个可逆的功率转换器布置在第一电动马达和第二电动马达之间,以便将电功率从一个电动马达可逆地传递到另一个电动马达。
[0027]
根据第一实施例,所述三个元件中的第一元件是联接到附件齿轮箱(agb)的行星架,所述三个元件中的第二元件是联接到发电机的齿圈,以及所述三个元件中的第三元件是联接到第一电动马达的行星式齿轮装置。在该构造中,所述三个元件中的第二元件也可以联接到第二电动马达。
[0028]
根据第二实施例,三个元件中的第一元件是联接到附件齿轮箱(agb)的行星架,所述三个元件中的第二元件是联接到发电机的齿圈,以及所述三个元件中的第三元件是联接到第一电动马达的行星式齿轮装置。在该构造中,所述三个元件中的第一元件也可以联接到第二电动马达。
[0029]
根据第三实施例,三个元件中的第一元件是联接到附件齿轮箱(agb)的齿圈,所述三个元件中的第二元件是联接到发电机的行星架,以及所述三个元件中的第三元件是联接到第一电动马达的行星式齿轮装置。在该构造中,所述三个元件中的第一元件也可以联接到第二电动马达。
[0030]
本发明还涉及一种涡轮机,特别是用于飞行器的涡轮机,涡轮机包括:
[0031]-附件齿轮箱,附件齿轮箱具有输出轴,
[0032]-整体式发电机,整体式发电机具有输入轴,
[0033]
其特征在于,涡轮机还包括根据本发明的驱动装置。
[0034]
本发明还涉及一种用于在飞行器中调节根据本发明的涡轮机的整体式发电机的速度的方法,该方法包括以下步骤:通过借助于控制构件控制第一电动马达来改变三个元件中的第三元件的速度,使得以恒定的速度驱动所述三个元件中的第二元件旋转。
附图说明
[0035]
通过以下以非限制性示例的方式以及参照附图进行的描述,将更好地理解本发明,并且本发明的其他细节、特征和优点将变得明显,在附图中:
[0036]
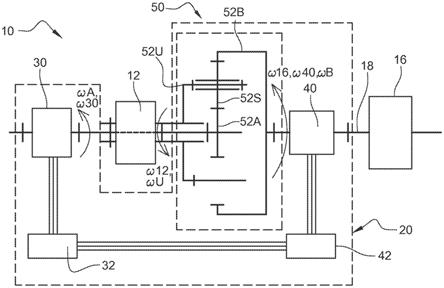
[图1]图1非常示意性地示出了根据本发明的涡轮机的驱动装置的第一运动学构造;
[0037]
[图2]图2非常示意性地示出了根据本发明的涡轮机的驱动装置的第二运动学构造;
[0038]
[图3]图3非常示意性地示出了根据本发明的涡轮机的驱动装置的第三运动学构造;以及
[0039]
[图4a-图4c]图4a、图4b和图4c示出了根据本发明的驱动装置的周转式减速齿轮系的分解图和示意图。
[0040]
在不同实施方式中具有相同功能的元件在图中具有相同的附图标记。
具体实施方式
[0041]
图1至图3示出了涡轮机10,该涡轮机包括根据本发明的驱动装置20。
[0042]
涡轮机10包括附件齿轮箱12,附件齿轮箱被构造为由发动机轴驱动。附件齿轮箱12可以包括多个齿轮系,多个齿轮系连接到用于驱动不同设备的输出轴。在此,齿轮箱的输出轴14中的一个输出轴通过驱动装置20驱动整体式发电机16。
[0043]
涡轮机10还包括整体式发电机16。发电机16使得能够将来自发电机的输入轴18的旋转的机械能转换为电能。
[0044]
驱动装置20包括第一电动马达30和控制构件,控制构件被构造为控制第一电动马达30。第一电动马达30可以是马达/发电机。换句话说,第一电动马达30可以被构造为通过提供电能而以发电机模式运行,并且通过回收电能而以马达模式运行。特别地,第一电动马
达30可以配备有电池。
[0045]
驱动装置20包括第二电动马达40和控制构件,控制构件被构造为控制第二电动马达40。第二电动马达40可以是马达/发电机。
[0046]
第一电动马达30和第二电动马达40被布置为将电功率从一个电动马达传递到另一个电动马达。
[0047]
优选地,第一电动马达30和第二电动马达40在交流电流中是异步的。
[0048]
驱动装置20可以包括可逆的功率转换器32、42,可逆的功率转换器布置在第一电动马达30和第二电动马达40之间,以便将电功率可逆地从一个电动马达传递到另一个电动马达。更具体地,第一电动马达30连接到第一功率转换器32,以及第二电动马达40连接到第二功率转换器42,并且第一功率转换器32和第二功率转换器42连接在一起。功率转换器可以是逆变器或矫直器。
[0049]
驱动装置20还包括周转式减速齿轮系50。周转式减速齿轮系的特性用于调整发电机16的输入轴18的旋转速度。
[0050]
图4a、图4b和图4c示出了周转式减速齿轮系50。
[0051]
周转式减速齿轮系50包括中心的行星式齿轮装置52a和行星架52u,中心的行星式齿轮装置被布置为能够围绕齿轮箱的轴杆以表示为ωa的旋转速度旋转,行星架被布置为能够围绕齿轮箱的轴杆以表示为ωu的旋转速度旋转。
[0052]
周转式减速齿轮系50还包括行星齿轮52s,行星齿轮与中心的行星式齿轮装置52a啮合并且由行星架52u承载。
[0053]
周转式减速齿轮系50还包括外齿圈52b,外齿圈被布置为能够围绕齿轮箱的轴杆以表示为ωb的旋转速度旋转,并且行星齿轮52s也与外齿圈啮合。
[0054]
在周转式减速齿轮系50中,三个元件(即,中心的行星式齿轮装置52a、行星架52u和齿圈52b)都能够围绕齿轮箱的轴杆旋转。例如,齿圈52b可以在固定壳体52c内自由旋转,固定壳体被构造为保护齿轮箱50。
[0055]
周转式减速齿轮系50的运行由威利斯(willis)公式控制。这是一种二自由度机构,其中,已知中心的行星式齿轮装置52a、行星架52u和齿圈52b中的两个元件的旋转速度,使得能够计算第三元件的旋转速度。
[0056]
威利斯公式由以下等式表示:
[0057]
[公式1]
[0058][0059]
或
[0060]
[公式2]
[0061]
ωa
–k×
ωb+(k-1)
×
ωu=0
[0062]
其中,ωa是中心的行星式齿轮装置52a的旋转速度,ωu是行星架52u的旋转速度,ωb是齿圈52b的旋转速度,以及因数k(也被称为比值)是由齿轮的几何形状确定的常数。
[0063]
对于图4中的齿轮箱,因数k遵循以下等式:
[0064]
[公式3]
[0065][0066]
其中,za是中心的行星式齿轮装置52a的齿数,以及zb是齿圈52b的齿数。因此,因数k是负的,模数小于1。
[0067]
附件齿轮箱12的输出轴14联接到齿轮箱50的三个元件中的一个元件,发电机16的输入轴18联接到齿轮箱50的第二元件,以及第一电动马达30联接到齿轮箱50的第三元件以控制第三元件的旋转速度。
[0068]
根据本发明,控制构件被构造为改变第三元件的旋转速度(即,第一电动马达30的旋转速度ω30),以使第二元件(即,发电机16)以恒定的速度被驱动旋转。
[0069]
为了获得发电机16的输入轴18的恒定的旋转速度,针对附件齿轮箱12的输出轴14的给定旋转速度,可以改变齿轮箱50的第三元件的旋转速度。
[0070]
相对于周转式减速齿轮系50的三个元件,六种运动学组合可以用于定位三个设备,即,附件齿轮箱12、发电机16和第一电动马达30。
[0071]
第二电动马达40还联接到齿轮箱50的没有联接到第一电动马达30的元件中的一个元件。第二电动马达40可以定位在发电机16的轴杆上或定位在附件齿轮箱的轴杆上。
[0072]
第一电动马达30和第二电动马达40各自包括定子和转子。根据施加到第一电动马达和第二电动马达的转子的扭矩和第一电动马达和第二电动马达的旋转速度ω30、ω40,第一电动马达30和第二电动马达40是能够控制的。然后,每个电动马达30、40的扭矩和速度通过由专用于每个电动马达的功率转换器32、42发送的电功率和电流的频率来控制。
[0073]
此外,第二电动马达40通过可逆的功率转换器32、42电连接到第一电动马达30,以便将功率从一个电动马达可逆地传递到另一个电动马达。
[0074]
第二电动马达40的位置使驱动装置20的可能的组合的数量加倍。这导致了下表中列出的十二种组合。
[0075]
表1还示出了根据附件齿轮箱12的输出轴14的旋转速度ω12和第一电动马达30的旋转速度ω30,给出了发电机16的旋转速度ω16的函数。第二电动马达40的旋转速度ω40由与第二电动马达串联联接到齿轮箱50上的设备的旋转速度确定,该设备是发电机16的轴或附件齿轮箱12的输出轴14。在该表中,选项1对应于第二电动马达40与在齿轮箱50的相同元件上的发电机16串联联接的情况,并且选项2对应于第二电动马达与在齿轮箱50的相同元件上的附件齿轮箱12的输出轴串联联接的情况。
[0076]
[表1]
[0077][0078]
由附件齿轮箱12、发电机16和第一电动马达30传递的扭矩通过齿轮系的平衡表达式相关联。
[0079]
特别地,对齿轮箱50的研究使得能够获得以下轮系平衡关系和功率的平衡关系:
[0080]
[公式4]
[0081]
ca+cb+cu=0
[0082]
[公式5]
[0083]
ωa
×
ca+ωb
×
cb+ωu
×
cu=0
[0084]
其中,ca是行星式齿轮装置52a上的扭矩,cb是齿圈52b上的扭矩,cu是行星架52u上的扭矩,ωa是中心的行星式齿轮装置52a的旋转速度,ωb是齿圈52b的旋转速度,ωu是行星架52u的旋转速度。
[0085]
这导致了在第一电动马达30处产生扭矩,并且因此根据速度和扭矩的方向在该电动马达处进行驱动或产生功率。
[0086]
第二电动马达40与发电机16或附件齿轮箱12串联连接,由此确定第二电动马达40
的旋转速度ω40等于该设备的旋转速度。
[0087]
因此,第二电动马达40根据其施加的扭矩为驱动装置提供额外的自由度,并且该自由度是除了齿轮箱50的相应元件上的发电机16或附件齿轮箱12的自由度之外的额外的自由度。
[0088]
该额外的自由度用于提供与第一电动马达30的功率传递。
[0089]
实际上,如果不增加使得能够与第一电动马达30进行功率传递的第二电动马达40,则在涡轮机飞行的某些阶段中,从附件齿轮箱12的轴杆释放的功率将小于由发电机16输送的电功率,并且在涡轮机飞行的某些阶段中,从附件齿轮箱12的轴杆释放的功率将大于飞行阶段的要求。
[0090]
在由发电机16输送的电功率大于从附件齿轮箱12释放的电功率的情况下,功率增益来自由处于马达模式的第一电动马达30释放的电功率。
[0091]
在由发电机16输送的电功率小于从附件齿轮箱12释放的电功率的情况下,由处于发电机模式的第一电动马达30释放功率损耗。
[0092]
在没有第二电动马达的情况下,第一电动马达30的电池使得能够在发电阶段期间回收电功率并且在驱动阶段期间恢复该电功率。
[0093]
第一电动马达30的驱动模式使得其能够在扭矩和速度方面的所有四个象限中运行。
[0094]
然后,在整个飞行阶段期间从附件齿轮箱12释放的总能量是由发电机16输送的电能。
[0095]
必须优化参数(例如齿轮箱50的周转式齿轮系的比值k和附件齿轮箱12侧的输入旋转速度等)的选择,以满足电机的不同约束、马达速度约束和最大功率约束。
[0096]
实际上,驱动装置20取决于多个参数,多个参数包括:齿轮箱50的周转式齿轮系的比值k、附件齿轮箱12的输出端的旋转速度ω12相对于涡轮机的发动机轴杆的旋速度的比值和发电机16的旋转速度ω16的最大值。
[0097]
必须通过优化这些参数以在十二种构造中进行选择,以特别实现以下目标:
[0098]-使发电机16的速度高于附件齿轮箱12的速度;
[0099]-减小第一电动马达30的扭矩以优化马达尺寸;
[0100]-使第一电动马达30的速度尽可能的高;
[0101]-使第二电动马达40的速度尽可能的高;
[0102]-优化第一电动马达30和第二电动马达40之间的电功率传递。
[0103]
并非表1中的所有组合都使得能够实现这些目标。
[0104]
因此,有必要对每个组合进行具体的优化研究,以激励在涡轮机上的实施方式的选择。以下描述的组合呈现了在涡轮机中集成时要考虑的不同优点。
[0105]
图1示出了“1b-选项1”构造,其中,附件齿轮箱12连接到行星架52u,发电机16连接到齿圈52b,并且第一电动马达30连接到中心的行星式齿轮装置52a。在该构造中,第二电动马达40连接到齿圈52b。
[0106]
该构造使得能够满足以下约束:
[0107]-特别是由于发电机16连接到齿圈52b,发电机16的旋转速度ω16高于附件齿轮箱12的旋转速度ω12;
[0108]-特别是通过使第一电动马达30连接到行星式齿轮装置52a,第一电动马达30的扭矩减小以优化马达的尺寸;
[0109]-特别是通过使第一电动马达30连接到行星式齿轮装置52a,第一电动马达30具有尽可能最高的旋转速度ω30;以及
[0110]-特别是通过使第二电动马达40连接到齿圈52b,第二电动马达40的旋转速度ω40尽可能高。
[0111]
在该构造中,第二电动马达40的控制受限于扭矩控制回路,因为第二电动马达的速度是恒定的,第二电动马达40和发电机16连接到齿轮箱50的相同元件。
[0112]
图2示出了“1b-选项2”构造,其中,附件齿轮箱12连接到行星架52u,发电机16连接到齿圈52b,并且第一电动马达30连接到中心的行星式齿轮装置52a。在该构造中,第二电动马达40连接到行星架52u。
[0113]
该构造使得能够满足以下约束:
[0114]-使发电机16的旋转速度ω16高于附件齿轮箱的旋转速度ω12;
[0115]-减小第一电动马达30的扭矩以优化马达的尺寸;以及
[0116]-使第一电动马达30的旋转速度ω30尽可能的高。
[0117]
在该构造中,第二电动马达40的控制包括扭矩和速度控制回路,第二电动马达40和附件齿轮箱12连接到齿轮箱50的相同元件。
[0118]
将第二电动马达40定位在发电机16的轴杆上(构造“1b-选项1”)还是定位在附件齿轮箱12的轴杆上(构造“1b-选项2”)的选择取决于应用,并且主要取决于设备的布局和尺寸,以及取决于涡轮机10的最大速度和发电机16的最大速度,涡轮机的最大速度和发电机16的最大速度由最大扭矩界定,从而由最大功率界定。
[0119]
图3示出了“2b-选项1”构造,其中,附件齿轮箱12连接到齿圈52b,发电机16连接到行星架52u,并且第一电动马达30连接到中心的行星式齿轮装置52a。在该构造中,第二电动马达40连接到行星架52u。
[0120]
构造的选择取决于所考虑的应用的功率水平。
[0121]
独立于选项的构造1a和构造1b,使得能够满足大多数应用和不同的主要限制。
[0122]
在构造1b、选项1或选项2中,由于电功率的传递没有损耗。实际上,第一电动马达30可以在发电机模式中通过周转式减速齿轮系50回收能量并且将能量返回到第二电动马达40,或者从第二电动马达40回收能量并且在马达模式中将能量返回到周转式减速齿轮系50。
[0123]
在运行中,周转式减速齿轮系50以三种不同的方式运行。
[0124]
首先,如果附件齿轮箱12的轴14的速度使得发电机16的速度对应于恒定速度的值,则第一电动马达30的控制速度为零,并且发电机16的速度通过周转式齿轮系在第一电动马达30的零速度时的减速比与附件齿轮箱12的轴14的速度相关。
[0125]
其次,如果附件齿轮箱12的轴14的速度使得发电机16的速度大于恒定速度的值,则驱动第一电动马达30以发电机模式沿一定的旋转方向运行,以降低发电机16的速度。然后将回收的能量返回到以马达模式运行的第二电动马达40。
[0126]
第三,如果附件齿轮箱12的轴14的速度使得发电机16的速度小于涡轮机的需求,则驱动第一电动马达30以马达模式沿另一旋转方向运行,以增加发电机16的速度。返回到
第一电动马达30的能量来自从以发电机模式运行的第二电动马达40回收的能量。
[0127]
从附件齿轮箱释放的功率完全转换为由发电机16输送的功率。
[0128]
根据(优选地是异步的)马达的设计和工艺,确保高可靠性的马达的冗余对马达的尺寸影响很小。
[0129]
本发明还涉及一种用于调节如前所述的涡轮机10的整体式发电机16的速度的方法。
[0130]
该方法包括以下步骤:通过借助于控制构件驱动第一电动马达30来改变三个元件中的第三元件的速度,使得以恒定的速度驱动所述三个元件中的第二元件(即,发电机16)旋转。
[0131]
特别地,第一电动马达30的速度适配于附件齿轮箱12的输出轴的速度,使得发电机16的速度是恒定的。