一种海上漂浮式风电机组的波浪俯仰运动控制方法与系统与流程
本发明涉及风电机组控制的,尤其是指一种海上漂浮式风电机组的波浪俯仰运动控制方法、系统、存储介质及计算设备。
背景技术:
1、海上漂浮式风电机组是采用浮式基础平台使风机浮在水面上,并通过系泊系统连于海床。与单桩或导管架的固定式基础相比,漂浮式风电机组在风浪的作用下的运动响应更大。在全生命运行过程中,漂浮式风电机组受到风载荷、浪载荷及流载荷影响,产生的运动幅值、加速度及载荷幅值更大。其中,漂浮式风电机组受到波浪的冲击,机组整体随着波浪产生周期俯仰运动;如此,漂浮式风电机组的塔架疲劳载荷将显著增加。为了降低漂浮式风电机组的塔架疲劳载荷,需要针对漂浮式风电机组随波浪俯仰运动的特点,提出一种海上漂浮式风电机组的波浪俯仰运动控制方法与系统。
技术实现思路
1、本发明的第一目的在于克服现有技术的缺点与不足,提供一种海上漂浮式风电机组的波浪俯仰运动控制方法,对测量的浮式基础平台俯仰倾角和机舱前后加速度进行计算,得到附加变桨指令和附加转速偏置,调节风轮侧的推力来抑制漂浮式风电机组随波浪运动。
2、本发明的第二目的在于提供一种海上漂浮式风电机组的波浪俯仰运动控制系统。
3、本发明的第三目的在于提供一种存储介质。
4、本发明的第四目的在于提供一种计算设备。
5、本发明的第一目的通过下述技术方案实现:一种海上漂浮式风电机组的波浪俯仰运动控制方法,执行以下操作:
6、采集漂浮式风电机组的浮式基础平台俯仰倾角和机舱前后加速度并进行数据处理,以获得浮式基础平台有效俯仰倾角和机舱有效前后加速度;
7、将获得的浮式基础平台有效俯仰倾角和机舱有效前后加速度,通过微分运算和积分运算,输出两类附加变桨指令,即第一附加变桨指令和第二附加变桨指令;其中,所述第一附加变桨指令是与浮式基础平台俯仰倾角速度一致的附加变桨指令,所述第二附加变桨指令是与机舱前后速度一致的附加变桨指令;
8、将获得的浮式基础平台有效俯仰倾角和机舱有效前后加速度,通过微分运算和积分运算,输出附加转速偏置;
9、在漂浮式风电机组正常发电状态下,将输出的附加转速偏置与漂浮式风电机组的变桨控制器输入的发电机转速设定值进行叠加,将输出的两类附加变桨指令与变桨控制器输出的变桨指令进行叠加,叠加后得到最终变桨指令传递到漂浮式风电机组的变桨系统执行,实现在漂浮式风电机组的风轮上产生抑制漂浮式风电机组随波浪运动的推力,从而降低漂浮式风电机组随波浪运动幅值。
10、进一步,通过倾角传感器测量浮式基础平台俯仰倾角,所述倾角传感器安装在漂浮式风电机组的浮式基础平台上,所述倾角传感器能够实时测量浮式基础平台两个方向的倾角,即浮式基础平台俯仰倾角和浮式基础平台侧向倾角,所述浮式基础平台俯仰倾角直接反应了漂浮式风电机组在波浪作用下的运动,然而倾角传感器测量的俯仰倾角不能直接用于控制;
11、对于浮式基础平台上安装多个倾角传感器的情况,每个倾角传感器都测得浮式基础平台俯仰倾角,能够通过加权取平均的数据处理方式获得浮式基础平台平均俯仰倾角,浮式基础平台平均俯仰倾角的定义如下:
12、
13、在上式中,表示浮式基础平台平均俯仰倾角;k1表示第一个倾角传感器的加权系数;θfa,1表示第一个倾角传感器测量的浮式基础平台俯仰倾角;k2表示第二个倾角传感器的加权系数;θfa,2表示第二个倾角传感器测量的浮式基础平台俯仰倾角;kn表示第n个倾角传感器的加权系数;θfa,n表示第n个倾角传感器测量的浮式基础平台俯仰倾角;
14、倾角传感器测量的浮式基础平台俯仰倾角包含各种频率的信号,仅波浪频率区间的浮式基础平台俯仰倾角能够作为控制输入信号,因此需要对测量数据进行滤波数据处理,取出波浪频率区间的浮式基础平台俯仰倾角,并滤除其它高频谐波噪声,定义浮式基础平台有效俯仰倾角,具体如下:
15、
16、在上式中,表示浮式基础平台有效俯仰倾角;ffa(s)表示有效俯仰倾角滤波器,内部包含带通滤波器和带阻滤波器;表示浮式基础平台平均俯仰倾角。
17、进一步,通过加速度传感器测量机舱前后加速度,所述加速度传感器安装在漂浮式风电机组的机舱上,所述加速度传感器能够实时测量机舱两个方向的加速度,即机舱前后加速度和机舱左右加速度,所述机舱前后加速度直接反应了漂浮式风电机组在波浪作用下的运动,然而加速度传感器测量的机舱加速度不能直接用于控制;
18、对于机舱上安装多个加速度传感器的情况,每个加速度传感器都测得机舱前后加速度,能够通过加权取平均的数据处理方式获得机舱平均前后加速度,机舱平均前后加速度的定义如下:
19、
20、在上式中,表示机舱平均前后加速度;m1表示第一个加速度传感器的加权系数;afa,1表示第一个加速度传感器测量的机舱前后加速度;m2表示第二个加速度传感器的加权系数;afa,2表示第二个加速度传感器测量的机舱前后加速度;mn表示第n个加速度传感器的加权系数;afa,n表示第n个加速度传感器测量的机舱前后加速度;
21、加速度传感器测量的机舱前后加速度包含各种频率的信号,仅波浪频率区间的机舱前后加速度能够作为控制输入信号,因此需要对测量数据进行滤波数据处理,取出波浪频率区间的机舱前后加速度,并滤除其它高频谐波噪声,定义机舱有效前后加速度,具体如下:
22、
23、在上式中,表示机舱有效前后加速度;hfa(s)表示有效前后加速度滤波器,内部包含带通滤波器和带阻滤波器;表示机舱平均前后加速度。
24、进一步,漂浮式风电机组随着波浪进行俯仰运动时,若在变桨指令上叠加与浮式基础平台俯仰倾角速度一致的附加变桨指令,则在风轮侧产生与机组俯仰运动速度方向相反的推力,抑制其随着波浪的俯仰运动,因此,将此附加变桨指令定义为第一附加变桨指令,所述第一附加变桨指令获取的方法如下:
25、将浮式基础平台有效俯仰倾角进行微分运算以后,得到浮式基础平台有效俯仰倾角速度,再经过比例增益得到第一附加变桨指令,所述第一附加变桨指令计算公式如下:
26、
27、在上式中,βfa,first表示第一附加变桨指令;afa表示第一附加变桨指令比例增益;表示浮式基础平台有效俯仰倾角;表示浮式基础平台有效俯仰倾角对时间的微分。
28、进一步,漂浮式风电机组随着波浪进行俯仰运动时,若在变桨指令上叠加与机舱前后速度一致的附加变桨指令,则在风轮侧产生与机组俯仰运动速度方向相反的推力,抑制其随着波浪的俯仰运动,因此,将此附加变桨指令定义为第二附加变桨指令,所述第二附加变桨指令获取的方法如下:
29、将机舱有效前后加速度进行积分运算以后,得到机舱有效前后速度,再经过比例增益得到第二附加变桨指令,所述第二附加变桨指令计算公式如下:
30、
31、在上式中,βfa,second表示第二附加变桨指令;bfa表示第二附加变桨指令比例增益;表示机舱有效前后加速度;表示机舱有效前后加速度对时间的积分。
32、进一步,漂浮式风电机组随着波浪进行俯仰运动时,若微调节风轮转速与俯仰运动速率一致变化,则会改变风轮侧推力,产生与机组俯仰运动速度方向相反的推力,抑制其随着波浪的俯仰运动,通过在变桨控制器输入的发电机转速上叠加附加转速偏置,能够实现调节风轮转速;
33、定义附加转速偏置,具体公式如下:
34、
35、在上式中,ωbias表示附加转速偏置;cfa表示倾角附加转速偏置增益;表示浮式基础平台有效俯仰倾角对时间的微分;dfa表示加速度附加转速偏置;表示机舱有效前后加速度对时间的积分。
36、进一步,变桨控制器输入最终转速设定值定义如下:
37、
38、在上式中,表示变桨控制器输入最终转速设定值;ωset表示发电机额定转速设定值;ωbias表示附加转速偏置;逗号后面表示条件。
39、进一步,最终变桨指令定义如下:
40、
41、在上式中,表示最终变桨指令;βc表示变桨控制器输出的统一变桨指令;βfa,first表示第一附加变桨指令;βfa,second表示第二附加变桨指令;逗号后面表示条件。
42、进一步,当漂浮式风电机组处于正常发电状态时,叠加第一附加变桨指令和第二附加变桨指令及附加转速偏置来降低漂浮式风电机组随波浪的运动,以此降低漂浮式风电机组的塔架疲劳载荷;当漂浮式风电机组处于非正常发电状态时,为保证机组的可靠性和安全,不再叠加任何指令,其中,所述非正常发电状态包括启机过程、停机过程及故障状态。
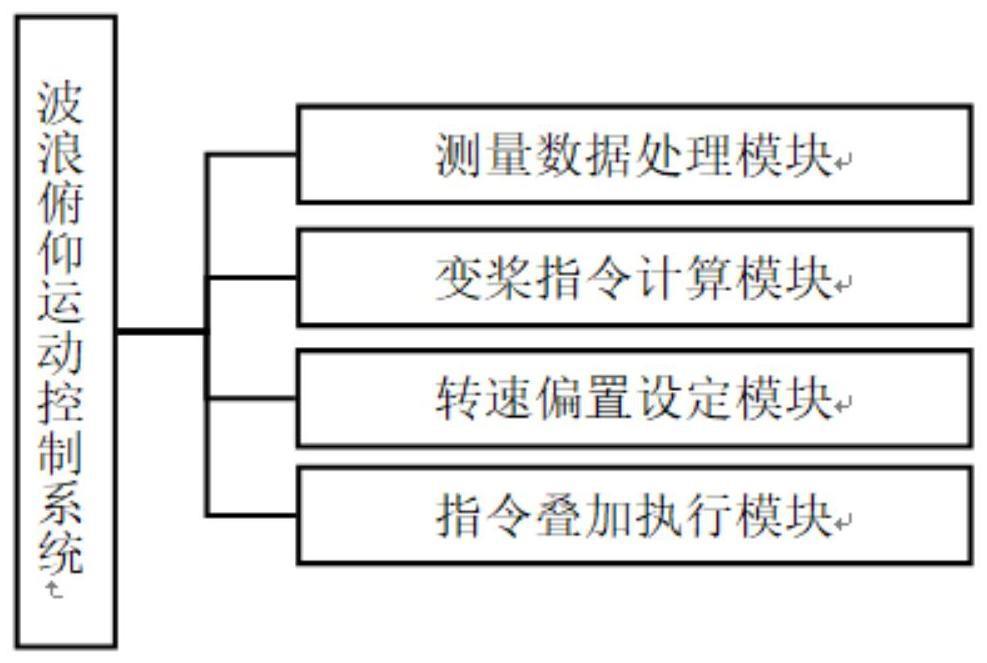
43、本发明的第二目的通过下述技术方案实现:一种海上漂浮式风电机组的波浪俯仰运动控制系统,用于实现上述的海上漂浮式风电机组的波浪俯仰运动控制方法,其包括:
44、测量数据处理模块,用于采集漂浮式风电机组的浮式基础平台俯仰倾角和机舱前后加速度并进行数据处理,以获得浮式基础平台有效俯仰倾角和机舱有效前后加速度;
45、变桨指令计算模块,用于将测量数据处理模块获得的浮式基础平台有效俯仰倾角和机舱有效前后加速度,通过微分运算和积分运算,输出两类附加变桨指令,即第一附加变桨指令和第二附加变桨指令;其中,所述第一附加变桨指令是与浮式基础平台俯仰倾角速度一致的附加变桨指令,所述第二附加变桨指令是与机舱前后速度一致的附加变桨指令;
46、转速偏置设定模块,用于将测量数据处理模块获得的浮式基础平台有效俯仰倾角和机舱有效前后加速度,通过微分运算和积分运算,输出附加转速偏置;
47、指令叠加执行模块,用于在漂浮式风电机组正常发电状态下,将输出的附加转速偏置与漂浮式风电机组的变桨控制器输入的发电机转速设定值进行叠加,将输出的两类附加变桨指令与变桨控制器输出的变桨指令进行叠加,叠加后得到最终变桨指令传递到漂浮式风电机组的变桨系统执行。
48、本发明的第三目的通过下述技术方案实现:一种存储介质,存储有程序,所述程序被处理器执行时,实现上述的海上漂浮式风电机组的波浪俯仰运动控制方法。
49、本发明的第四目的通过下述技术方案实现:一种计算设备,包括处理器以及用于存储处理器可执行程序的存储器,所述处理器执行存储器存储的程序时,实现上述的海上漂浮式风电机组的波浪俯仰运动控制方法。
50、本发明与现有技术相比,具有如下优点与有益效果:
51、1、本发明通过提取浮式基础平台俯仰倾角中波浪频率区间的信号,通过微分运算与比例运算,建立浮式基础平台有效俯仰倾角与第一附加变桨指令之间的联系,在风轮上产生抑制漂浮式风电机组随波浪运动的推力,降低机组随波浪运动幅值。
52、2、本发明通过提取机舱前后加速度中波浪频率区间的信号,通过积分运算和比例运算,建立机舱有效前后加速度与第二附加变桨指令之间的联系,在风轮上产生抑制漂浮式风电机组随波浪运动的推力,降低机组随波浪运动幅值。
53、3、本发明通过建立浮式基础平台有效俯仰倾角和机舱有效前后加速度与附加转速偏置之间联系,通过调节风轮转速,在风轮上产生抑制漂浮式风电机组随波浪运动的推力,降低机组随波浪运动幅值。
54、4、本发明使用现有的传感器测量数据,不增加额外的传感器设备成本。
- 还没有人留言评论。精彩留言会获得点赞!