风力发电机组控制方法、装置及风力发电机组与流程
本技术涉及风力发电机组控制,具体涉及一种风力发电机组控制方法、装置及风力发电机组。
背景技术:
1、在风力发电系统中,风速、风向、风切变、湍流、涡流及空气密度均受气温、季节、地形等影响因素随机变化,对风机的转速控制造成很大的挑战。目前对于风力发电机组的控制主要是基于传统的pid算法,而pid算法存在处理非线性问题能力有限、参数难以调整、对干扰信息敏感等问题,因此无法实现对风力发电机组的稳定控制,存在抗干扰能力低而导致控制稳定性较低的问题。
技术实现思路
1、有鉴于此,本技术实施例提供一种风力发电机组控制方法、装置及风力发电机组,通过利用时滞信息估计风力发电机组在运行过程中因风速变化产生的干扰以及风力发电机组系统建模不确定性,通过结合风力发电机组的时滞信息对其进行控制,以解决现有技术中基于传统的pid算法存在抗干扰能力低而导致控制稳定性较低的问题。
2、第一方面,本技术实施例提供一种发电机控制方法,可以包括:
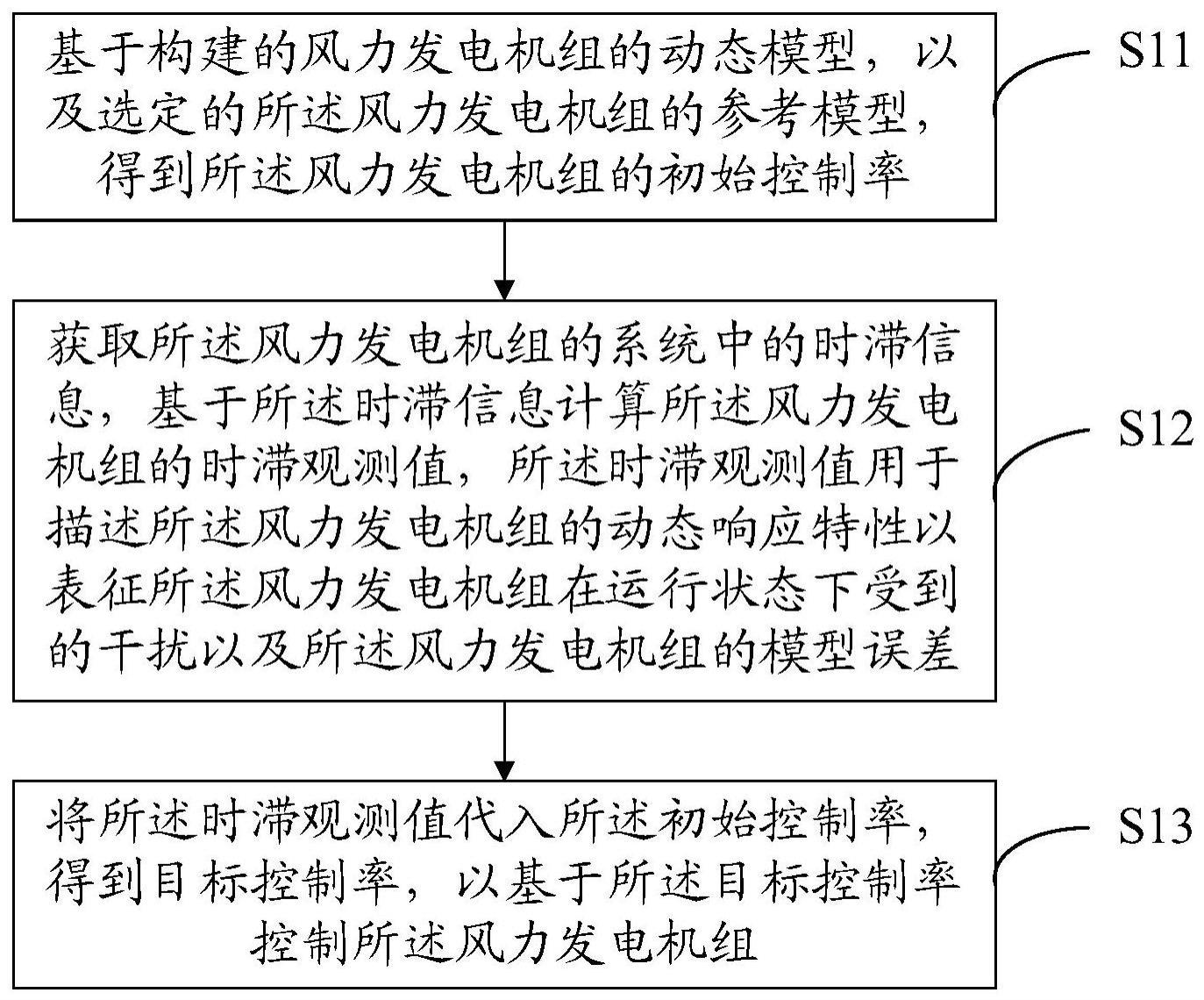
3、基于构建的风力发电机组的动态模型,以及选定的所述风力发电机组的参考模型,得到所述风力发电机组的初始控制率;
4、获取所述风力发电机组的系统中的时滞信息,基于所述时滞信息计算所述风力发电机组的时滞观测值,所述时滞观测值用于描述所述风力发电机组的动态响应特性以表征所述风力发电机组在运行状态下受到的干扰以及所述风力发电机组的模型误差;
5、将所述时滞观测值代入所述初始控制率,得到目标控制率,以基于所述目标控制率控制所述风力发电机组。
6、在上述实现过程中,可以通过结合风力发电机组的时滞信息计算风力发电机组的时滞观测值,通过时滞观测值描述风力发电机组的动态响应特性从而可以估计风力发电机组在运行过程中的工况干扰或是建模的不确定性,并代入进结合动态模型以及参考模型得到所述风力发电机组的初始控制率以得到目标控制率,再基于目标控制率对风力发电机组进行控制以替代使用pid进行控制的方式,可以减少风力发电机组工况干扰对控制效果的影响,以及补偿系统建模误差,从而可以提高风力发电机组控制的有效性和稳定性。
7、可选地,所述动态模型可以由气动模型、传动链模型、桨距角和转矩执行器模型构成;
8、其中,所述气动模型表征所述风力发电机组的主轴转矩、主轴转速、桨矩角和风速之间的关系;所述传动链模型表征所述风力发电机组的主轴与所述风力发电机组之间的转速与转矩之间的关系;所述桨距角和转矩执行器模型表征所述风力发电机组的桨叶角度和转矩输出的关系。
9、可选地,所述基于构建的风力发电机组的动态模型以及选定的所述风力发电机组的参考模型得到所述风力发电机组的初始控制率可以包括:
10、基于所述气动模型、所述传动链模型、所述桨距角和转矩执行器构建所述动态模型;
11、根据所述风力发电机组的性能指标确定所述风力发电机组的参考模型,所述参考模型的误差满足随时间变化的误差动态方程;
12、将所述误差动态方程代入所述动态模型中,确定所述初始控制率。
13、在上述实现过程中,可以通过结合风力发电机组的动态模型和参考模型得到风力发电机组的初始控制率,根据风力发电机组的运行特性,在建立的动态模型中将输出扭矩在各个风况点上线性化而并不直接处理,通过结合时滞观测值后再对风力发电机组进行控制,可以减少风力发电机组工况干扰对控制效果的影响,提高风力发电机组控制的有效性和稳定性。
14、可选地,所述时滞信息可以包括风速测量时滞、功率响应时滞、控制信号传输时滞、机械延迟和电子响应时滞中的至少一种。
15、可选地,所述获取所述风力发电机组的系统中的时滞信息以表征所述风力发电机组的工况干扰以及模型误差可以包括:
16、基于所述风速测量时滞、功率响应时滞、控制信号传输时滞、机械延迟和电子响应时滞中的至少一种确定假设外部干扰不发生突变的时间步长值,将所述时间步长值代入所述动态模型,得到所述时滞观测值。
17、在上述实现过程中,可以基于时滞信息描述系统的动态响应特性,从而估计风机在运行过程中的因风速变化产生的干扰以及系统建模不确定性,减少风速产生的干扰对控制效果的影响,以及补偿系统建模误差,从而可以提高风力发电机组控制的有效性和稳定性。
18、可选地,所述将所述时滞观测值代入所述初始控制率,得到目标控制率,以基于所述目标控制率控制所述风力发电机组可以包括:
19、将所述时滞观测值代入所述初始控制率中得到目标控制率,并根据所述目标控制率计算得到所述风力发电机组的桨距角和转矩参考值;基于所述桨距角和所述转矩参考值控制所述风力发电机组的桨距角伺服电机和转矩输出。
20、在上述实现过程中,可以基于时滞信息来估计风力发电机组在运行过程中的因外部条件变化,如风速的变化而产生的干扰,通过将时滞观测值结合初始控制率得到目标控制率再由目标控制率对风力发电机组进行对应桨距和转矩的控制,可以降低外部干扰对风力发电机组控制的影响,从而提高风力发电机组控制的有效性和稳定性。
21、第二方面,本技术实施例还提供一种风力发电机组控制装置,可以包括:
22、初始控制率生成模块,用于基于构建的风力发电机组的动态模型,以及选定的所述风力发电机组的参考模型,得到所述风力发电机组的初始控制率;
23、获取模块,用于获取所述风力发电机组的系统中的时滞信息,基于所述时滞信息计算所述风力发电机组的时滞观测值,所述时滞观测值用于描述所述风力发电机组的动态响应特性以表征所述风力发电机组在运行状态下受到的干扰以及所述风力发电机组的模型误差;
24、目标控制率生成模块,用于将所述时滞观测值代入所述初始控制率,得到目标控制率,以基于所述目标控制率控制所述风力发电机组。
25、可选地,所述动态模型由气动模型、传动链模型、桨距角和转矩执行器模型构成;其中,所述气动模型表征所述风力发电机组的主轴转矩、主轴转速、桨矩角和风速之间的关系;所述传动链模型表征所述风力发电机组的主轴与所述风力发电机组之间的转速与转矩之间的关系;所述桨距角和转矩执行器模型表征所述风力发电机组的桨叶角度和转矩输出的关系。
26、初始控制率生成模块可以具体用于:
27、基于所述气动模型、所述传动链模型、所述桨距角和转矩执行器构建所述动态模型;根据所述风力发电机组的性能指标确定所述风力发电机组的参考模型,所述参考模型的误差满足随时间变化的误差动态方程;以及将所述误差动态方程代入所述动态模型中,确定所述初始控制率。
28、可选地,所述时滞信息包括风速测量时滞、功率响应时滞、控制信号传输时滞、机械延迟和电子响应时滞中的至少一种。
29、可选地,获取模块可具体用于:
30、基于所述风速测量时滞、功率响应时滞、控制信号传输时滞、机械延迟和电子响应时滞中的至少一种确定假设外部干扰不发生突变的时间步长值,将所述时间步长值代入所述动态模型,得到所述时滞观测值。
31、可选地,目标控制率生成模块可具体用于:
32、将所述时滞观测值代入所述初始控制率中得到目标控制率,并根据所述目标控制率计算得到所述风力发电机组的桨距角和转矩参考值;以及基于所述桨距角和所述转矩参考值控制所述风力发电机组的桨距角伺服电机和转矩输出。
33、可选地,所述风力发电机组的参考模型包括基于性能指标信息选定的模型参数矩阵、参考状态向量和状态追踪向量。
34、第三方面,本技术实施例提供一种风力发电机组,所述电子设备包括风力发电机组,所述存储器中存储有程序指令,所述处理器运行所述程序指令时,执行上述任一实现方式中的步骤。
35、第四方面,本技术实施例提供一种计算机可读存储介质,所述可读取存储介质中存储有计算机程序指令,所述计算机程序指令被一处理器读取并运行时,执行上述任一实现方式中的步骤。
36、综上,本技术实施例提供了一种风力发电机组控制方法、装置及风力发电机组,可以通过结合风力发电机组的时滞信息计算风力发电机组的时滞观测值,通过时滞观测值描述风力发电机组的动态响应特性从而可以估计风力发电机组在运行过程中的工况干扰或是建模的不确定性,并代入进结合动态模型以及参考模型得到所述风力发电机组的初始控制率以得到目标控制率,再基于目标控制率对风力发电机组进行控制以替代使用pid进行控制的方式,可以减少风力发电机组工况干扰对控制效果的影响,以及补偿系统建模误差,从而可以提高风力发电机组控制的有效性和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!