可移动式扫描仪工作装置、混凝土湿喷机及控制方法与流程
1.本发明涉及隧道施工设备技术领域,具体涉及一种可移动式扫描仪工作装置、混凝土湿喷机及控制方法。
背景技术:
2.混凝土湿喷机作为钻爆法隧道施工的重要设备,被广泛应用在隧道混凝土搅拌和喷射施工中。为降低操作手的工作强度和工作风险,实现隧道施工的精准化、智能化,智能型混凝土湿喷机成为了新的发展趋势。智能型混凝土湿喷机需要能自主完成喷射作业,其首要解决的问题是自动定位、识别隧道轮廓、规划喷射路径。
3.目前市面上现有的混凝土湿喷机普遍存在无法实现无人/少人化、扫描仪死角多等问题,此类问题多由扫描仪的布局规划需要多人协助、盲点多所致;因此合理优化扫描仪的设置方式,实现安全、高效、智能的隧道施工成为了隧道建设的必然选择。
4.综上所述,急需可移动式扫描仪工作装置、混凝土湿喷机及控制方法以解决现有技术中存在的问题。
技术实现要素:
5.本发明目的在于提供一种可移动式扫描仪工作装置,旨在解决现有扫描仪设置方式,导致扫描仪在工作时存在死角多的问题,具体技术方案如下:
6.一种可移动式扫描仪工作装置,包括罩壳组件、支架组件、驱动组件和扫描仪;所述扫描仪通过驱动组件滑动设置于支架组件上;所述罩壳组件设置于支架组件上,用于对扫描仪进行防护,所述罩壳组件包括打开状态和关闭状态。
7.以上技术方案中优选的,所述驱动组件包括至少一级滑动组件;各级滑动组件层叠设置,所述扫描仪设置于最上层的滑动组件上,最下层的滑动组件设置于支架组件上。
8.以上技术方案中优选的,单级滑动组件实现滑动的驱动方式为滑移驱动件进行驱动或人力进行驱动。
9.以上技术方案中优选的,所述罩壳组件包括保护罩、翻转驱动件、摇臂和连杆,所述保护罩的一侧与支架组件铰接,所述摇臂一端与支架组件铰接,其另一端与连杆铰接,所述连杆远离摇臂的一端与保护罩铰接;所述翻转驱动件一端与支架组件铰接,其另一端与摇臂铰接。
10.以上技术方案中优选的,所述罩壳组件还包括安装框架,所述安装框架固定设置于支架组件上,所述保护罩铰接于安装框架上。
11.以上技术方案中优选的,所述安装框架上设有密封条,所述密封条用于对安装框架与保护罩之间进行密封。
12.以上技术方案中优选的,所述支架组件上设有用于安装翻转驱动件的避空槽,所述避空槽的两端分别设有第一安装座和第二安装座,所述第一安装座用于与翻转驱动件铰接,所述第二安装座用于与摇臂铰接。
13.以上技术方案中优选的,所述支架组件包括底座框架和设置于底座框架上的安装板,所述避空槽设置于安装板上。
14.本发明还提供了一种混凝土湿喷机,包括所述的可移动式扫描仪工作装置。
15.本发明还提供了一种所述混凝土湿喷机进行自动定位和隧道轮廓扫描的控制方法,包括以下步骤:
16.步骤s1:驾驶混凝土湿喷机至距掌子面规定距离处,撑起支腿,驱动翻转驱动件将扫描仪工作装置的保护罩打开;
17.步骤s2:最下层滑动组件带动扫描仪伸出,启动扫描仪进行预扫描,确定扫描仪是否能够扫描到隧道后方的基准定位点;若能扫描到基准定位点,则进入步骤s4,若不能,则进入步骤s3;
18.步骤s3:驱动最下层滑动组件上方的滑动组件继续伸出,直至扫描仪能够扫描到隧道后方的基准定位点;
19.步骤s4:启动扫描仪绕竖直向和水平向进行360
°
旋转,进行混凝土湿喷机自动定位,计算混凝土湿喷机的准确位置;
20.步骤s5:启动扫描仪绕竖直向和水平向进行360
°
旋转,扫描隧道轮廓,并与设计轮廓对比,判别超欠挖位置和超欠挖值,规划混凝土喷射位置和喷射量;
21.步骤s6:滑动组件全部缩回,带动扫描仪复位;翻转驱动件驱动保护罩关闭,完成扫描全过程。
22.应用本发明的技术方案,具有以下有益效果:
23.本发明的扫描仪工作装置,通过翻转驱动件实现保护罩进行自动开合、通过驱动组件驱动扫描仪伸出至车体外部,可实现工作装置自动工作,实现混凝土湿喷机自动定位和隧道轮廓扫描。本装置结构紧凑,动作灵活,功能强大。同现有的扫描仪工作装置相比,本发明的工作装置具备自动展开、自动滑移、自动扫描的功能;几乎没有扫描死角、扫描精度高、隧道适应性好;操作方便、作业成本低、效率高;可实现无人/少人操作。
24.除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
25.构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
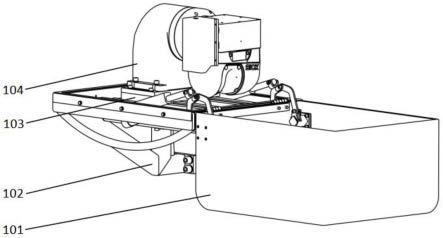
26.图1是扫描仪工作装置的整体结构示意图;
27.图2是罩壳组件的结构示意图;
28.图3是支架组件的结构示意图;
29.图4是驱动组件的结构示意图;
30.图5是保护罩打开状态示意图;
31.图6是一级滑台伸出状态示意图;
32.图7是二级滑台伸出状态示意图;
33.图8是保护罩关闭状态示意图;
34.其中,101、罩壳组件,102、支架组件,103、驱动组件,104、扫描仪;
35.201、保护罩,202、安装框架,203、密封条,204、翻转驱动件,205、摇臂,206、连杆,207、合页,208、铰接座;
36.301、底座框架,302、安装板,303、第一安装座,304、第二安装座,305、避空槽;401、滑移驱动件,402、底层轨道,403、一级滑台,404、二级滑台。
具体实施方式
37.为了便于理解本发明,下面将对本发明进行更全面的描述,并给出了本发明的较佳实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
38.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
39.实施例1:
40.参见图1-图4,一种可移动式扫描仪工作装置,包括罩壳组件101、支架组件102、驱动组件103和扫描仪104;所述扫描仪104通过驱动组件103滑动设置于支架组件102上;所述罩壳组件101设置于支架组件102上,用于对扫描仪104进行防护,所述罩壳组件101包括打开状态和关闭状态。具体地,所述扫描仪104自身具备绕水平和竖直方向360
°
旋转扫描的功能。
41.所述驱动组件103包括至少一级滑动组件;各级滑动组件层叠设置,所述扫描仪104设置于最上层的滑动组件上,最下层的滑动组件设置于支架组件102上。
42.优选的,单级滑动组件实现滑动的驱动方式为滑移驱动件401进行驱动或人力进行驱动;采用人力进行驱动时,当滑动到目标位置时采用螺栓进行固定。
43.在实际应用中,驱动组件103可以只设置一级滑动组件,即最上层和最下层均为该级滑动组件,通过该级滑动组件伸缩实现扫描仪104相对于支架组件102滑动。
44.本实施例中优选的,驱动组件包括两级滑动组件,即驱动组件能实现两级滑动。参见图4,所述驱动组件包括底层轨道402、一级滑台403和二级滑台404,所述底层轨道402设置于支架组件102上,所述一级滑台403滑动设置于底层轨道402上,且一级滑台403与底层轨道402之间通过滑移驱动件401进行驱动(即滑移驱动件连接支架组件和一级滑台,除此之外将滑移驱动件连接一级滑台和某个构件也是可行的,即该构件相对于底层轨道是静止的,该构件可以是工作装置之外的构件);所述一级滑台403的顶面设有滑槽,所述二级滑台404滑动设置于一级滑台403的滑槽中,二级滑台和一级滑台之间通过人力进行驱动,即手动推动二级滑台在一级滑台上滑动,二级滑台运动到目标位置后通过螺栓进行固定;所述扫描仪设置于二级滑台上;本实施例中一级滑台的滑移行程200mm,二级滑台的滑移行程100mm。
45.两级滑动组件的结构形式除了上述的方式,还可以是采用滑轨滑台进行层叠,上一层的滑轨设置于下一层的滑台上,最底层的滑轨固定设置于支架组件上,最顶层的滑台上固定设置扫描仪。
46.参见图2,所述罩壳组件101包括保护罩201、翻转驱动件204、摇臂205和连杆206,所述保护罩201的一侧与支架组件102铰接,所述摇臂205一端与支架组件102铰接,其另一
端与连杆206铰接,所述连杆206远离摇臂205的一端与保护罩201铰接;所述翻转驱动件204一端与支架组件102铰接,其另一端与摇臂205铰接。
47.进一步优选的,所述罩壳组件101还包括安装框架202,所述安装框架202固定设置于支架组件102上,所述保护罩201铰接于安装框架202上。
48.所述安装框架202上设有密封条203,所述密封条203用于对安装框架202与保护罩201之间进行密封。
49.具体地,所述保护罩201与安装框架202之间通过合页207进行铰接,所述保护罩201上设有铰接座208,所述连杆206铰接于铰接座208上;通过翻转驱动件伸出,带动摇臂和连杆驱动保护罩翻转180
°
打开,通过翻转驱动件缩回,带动摇臂和连杆驱动保护罩翻转关闭,即保护罩与安装框架之间处于被密封条密封的状态;具体地,在扫描仪工作开始前驱动保护罩打开,在扫描仪工作结束后驱动保护罩关闭;保护扫描仪104在非工作状态下不与落石、灰尘、水等直接接触。
50.参见图3,所述支架组件102上设有用于安装翻转驱动件204的避空槽305,所述避空槽305的两端分别设有第一安装座303和第二安装座304,所述第一安装座用于与翻转驱动件204铰接,所述第二安装座304用于与摇臂205铰接;避空槽的作用是防止支架组件与翻转驱动件发生干涉。
51.具体地,所述支架组件102包括底座框架301和设置于底座框架301上的安装板302,所述避空槽305设置于安装板302上。所述安装板上还设有用于安装底层轨道402的安装孔。
52.优选的,所述滑移驱动件401和翻转驱动件204为电动推杆、电缸、油缸和气缸中的一种。
53.在实际的应用中,所述移动式扫描仪工作装置通过底座框架301设置于混凝土湿喷机的车架上,本实施例还提供了所述混凝土湿喷机进行自动定位和隧道轮廓扫描的控制方法,包括以下步骤:
54.步骤s1:驾驶混凝土湿喷机至距掌子面规定距离处,撑起支腿,驱动翻转驱动件将扫描仪工作装置的保护罩打开,如图5所示;
55.步骤s2:如图6所示,最下层滑动组件带动扫描仪伸出,即一级滑台伸出实现扫描仪激光探头伸出车体外,启动扫描仪进行预扫描,确定扫描仪是否能够扫描到隧道后方的基准定位点;若能扫描到基准定位点,则进入步骤s4,若不能,则进入步骤s3;
56.步骤s3:如图7所示,驱动最下层滑动组件上方的滑动组件继续伸出,直至扫描仪能够扫描到隧道后方的基准定位点;本实施例在步骤s3中是将二级滑台伸出,伸出后通过螺栓进行固定;
57.步骤s4:启动扫描仪绕竖直向和水平向进行360
°
旋转,进行混凝土湿喷机自动定位,计算混凝土湿喷机的准确位置;
58.步骤s5:启动扫描仪绕竖直向和水平向进行360
°
旋转,扫描隧道轮廓,并与设计轮廓对比,判别超欠挖位置和超欠挖值,规划混凝土喷射位置和喷射量;
59.步骤s6:滑动组件全部缩回,带动扫描仪复位;翻转驱动件驱动保护罩关闭,如图8所示,完成扫描全过程。
60.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技
术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1