一种螺杆转子设计方法与流程
1.本发明涉及真空泵领域,具体是一种螺杆转子设计方法。
背景技术:
2.目前传统的螺杆真空泵转子,存在三角形泄漏区,密封性差,使用时螺杆转子前后级会产生漏气现象;且由于传统的变螺距螺杆,总的螺杆圈数较少,没有单独的排气端螺杆导程,排气端很容易向进气端返流,二者叠加,严重影响了泵的极限真空及泵的抽气性能,特别在抽吸氢气等小分子气体时,在高转速下抽气能力极差,因此亟待解决。
技术实现要素:
3.为了避免和克服现有技术中存在的技术问题,本发明提供了一种螺杆转子设计方法。本发明设计的螺杆转子密封性好且可在高转速下实现对小分子气体的抽气作业。
4.为实现上述目的,本发明提供如下技术方案:
5.一种螺杆转子设计方法,包括如下步骤:
6.s1、根据转速及真空度要求设计得到螺杆转子的型线;
7.s2、分三段加工螺杆转子的螺纹导程,三段螺纹导程包括螺距依次降低布置且型线相同的进气段、渐变压缩段以及排气段,进气段以及排气段的螺距呈等距设计,渐变压缩段的螺距沿轴向逐渐缩小且渐变压缩段的首尾处的螺距分别与对应进气段以及排气段处的螺距相等;
8.s3、取预定长度的进气段、渐变压缩段以及排气段依次镶嵌固定在中心轴上;
9.螺杆转子的型线包括依次布置且首尾相连的第一外摆线ab、第一内摆线bc、齿根圆线cd、第二内摆线de、齿顶圆线ef以及第二外摆线ef,其中齿根圆线cd是以半径为rr的圆弧线,齿顶圆线ef是以半径为r
t
的圆弧线;
10.所述第一外摆线ab的坐标函数:
11.x1=120cos(t1)-60cos(2t1);
12.y1=-120sin(t1)+60sin(2t1);
13.t1=[0.83,0];
[0014]
所述第一内摆线bc的坐标函数:
[0015]
x2=120cos(t2+¢)-78cos(2t2+¢);
[0016]
y2=78sin(2t2+¢)-120sin(t2+¢);
[0017]
t2=[0,0.44];
[0018]
所述第二内摆线de的坐标函数:
[0019]
x3=-120cos(t3+¢)+78cos(2t3+¢);
[0020]
y3=78sin(2t3+¢)-120sin(t3+¢);
[0021]
t3=[-0.44,0];
[0022]
¢可由(r
t
+rr)cos(t2+¢)-r
t cos(2t2+¢)=0或(r
t
+rr)cos(t3+¢)-r
t cos(2t3+
¢)=0求得;
[0023]
所述第二外摆线ef的坐标函数:
[0024]
x4=-120cos(t4)+60cos(2t4);
[0025]
y4=-120sin(t4)+60sin(2t4);
[0026]
t4=[-0.83,0]。
[0027]
作为本发明进一步的方案:r
t
=78mm,rr=42mm,齿根圆线cd圆心与齿顶圆线ef圆心间的距离为120mm。
[0028]
作为本发明再进一步的方案:在步骤s3中,所述进气段长度为160mm,螺距为80mm,啮合间隙为0.25mm;
[0029]
所述渐变压缩段长度为122.5mm,螺距自80mm均匀缩小至18mm,啮合间隙0.21mm;
[0030]
所述排气段的长度为99mm,螺距为18mm,啮合间隙0.15mm。
[0031]
与现有技术相比,本发明的有益效果是:
[0032]
1、本发明通过通过对螺杆转子的长度以及螺杆型线的合理布置,使其在6000~8000转的高转速工况下密封性能达到最佳,大大提升了真空泵在6000~8000转的高转速下抽吸氢气等小分子气体的能力。
附图说明
[0033]
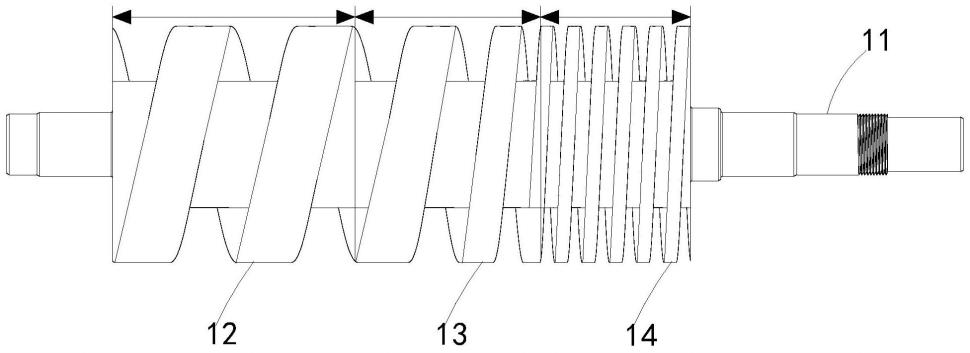
图1为本发明的结构示意图。
[0034]
图2为本发明中转子的型线图。
[0035]
图3为本发明中转子的型线配合图。
[0036]
图4为本发明的螺杆工作时的温度场分布图。
[0037]
图中:11、中心轴;12、进气段;13、渐变压缩段;14、排气段。
具体实施方式
[0038]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0039]
请参阅图1~4,本发明实施例中,一种螺杆转子设计方法,包括如下步骤:
[0040]
s1、根据转速及真空度要求设计得到螺杆转子的型线;
[0041]
本发明的螺杆转子适用于6000-8000转的高转速工况下。
[0042]
螺杆转子的型线包括依次布置且首尾相连的第一外摆线ab、第一内摆线bc、齿根圆线cd、第二内摆线de、齿顶圆线ef以及第二外摆线ef,其中齿根圆线cd是以半径为rr的圆弧线,齿顶圆线ef是以半径为r
t
的圆弧线。其中,r
t
=78mm,rr=42mm,齿根圆线cd圆心与齿顶圆线ef圆心间的距离为120mm。
[0043]
第一外摆线ab的坐标函数:
[0044]
x1=120cos(t1)-60cos(2t1);
[0045]
y1=-120sin(t1)+60sin(2t1);
[0046]
t1=[0.83,0];
[0047]
第一内摆线bc的坐标函数:
[0048]
x2=120cos(t2+¢)-78cos(2t2+¢);
[0049]
y2=78sin(2t2+¢)-120sin(t2+¢);
[0050]
t2=[0,0.44];
[0051]
第二内摆线de的坐标函数:
[0052]
x3=-120cos(t3+¢)+78cos(2t3+¢);
[0053]
y3=78sin(2t3+¢)-120sin(t3+¢);
[0054]
t3=[-0.44,0];
[0055]
¢可由(r
t
+rr)cos(t2+¢)-r
t cos(2t2+¢)=0或(r
t
+rr)cos(t3+¢)-r
t cos(2t3+¢)=0求得;
[0056]
第二外摆线ef的坐标函数:
[0057]
x4=-120cos(t4)+60cos(2t4);
[0058]
y4=-120sin(t4)+60sin(2t4);
[0059]
t4=[-0.83,0]。
[0060]
s2、分三段加工螺杆转子的螺纹导程,三段螺纹导程包括螺距依次降低布置且型线相同的进气段12、渐变压缩段13以及排气段14,进气段12以及排气段14的螺距呈等距设计,渐变压缩段13的螺距沿轴向逐渐缩小且渐变压缩段13的首尾处的螺距分别与对应进气段12以及排气段14处的螺距相等;
[0061]
s3、取预定长度的进气段12、渐变压缩段13以及排气段14依次镶嵌固定在中心轴11上。
[0062]
进气段12长度为160mm,螺距为80mm,啮合间隙为0.25mm;
[0063]
渐变压缩段13长度为122.5mm,螺距自80mm均匀缩小至18mm,啮合间隙0.21mm;
[0064]
排气段14的长度为99mm,螺距为18mm,啮合间隙0.15mm。
[0065]
如图4所示,在高转速工况下,本专利的螺杆各导程温度分布均匀,温度梯度极小,在高转速下螺杆膨胀时,各段导程的啮合间隙均匀。本专利尤其适用于6000~8000转的高转速工况下,此时本专利的螺杆密封性大幅度领先现有的螺杆结构,排气侧向吸气侧的返流极小,大大提升了真空泵对抽吸氢气等小分子气体的能力。
[0066]
以上结合具体实施例描述了本技术的基本原理,但是,需要指出的是,在本技术中提及的优点、优势、效果等仅是示例而非限制,不能认为这些优点、优势、效果等是本技术的各个实施例必须具备的。另外,上述公开的具体细节仅是为了示例的作用和便于理解的作用,而非限制,上述细节并不限制本技术为必须采用上述具体的细节来实现。
[0067]
本技术中涉及的器件、装置、设备、系统的方框图仅作为例示性的例子并且不意图要求或暗示必须按照方框图示出的方式进行连接、布置、配置。如本领域技术人员将认识到的,可以按任意方式连接、布置、配置这些器件、装置、设备、系统。诸如“包括”、“包含”、“具有”等等的词语是开放性词汇,指“包括但不限于”,且可与其互换使用。这里所使用的词汇“或”和“和”指词汇“和/或”,且可与其互换使用,除非上下文明确指示不是如此。这里所使用的词汇“诸如”指词组“诸如但不限于”,且可与其互换使用。
[0068]
还需要指出的是,在本技术的装置、设备和方法中,各部件或各步骤是可以分解和/或重新组合的。这些分解和/或重新组合应视为本技术的等效方案。
[0069]
提供所公开的方面的以上描述以使本领域的任何技术人员能够做出或者使用本技术。对这些方面的各种修改对于本领域技术人员而言是非常显而易见的,并且在此定义的一般原理可以应用于其他方面而不脱离本技术的范围。因此,本技术不意图被限制到在此示出的方面,而是按照与在此公开的原理和新颖的特征一致的最宽范围。
[0070]
为了例示和描述的目的已经给出了以上描述。此外,此描述不意图将本技术的实施例限制到在此公开的形式。尽管以上已经讨论了多个示例方面和实施例,但是本领域技术人员将认识到其某些变型、修改、改变、添加和子组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1