一种多功能管道清淤机器人的制作方法
1.本实用新型涉及管道清淤技术领域,具体是一种多功能管道清淤机器人。
背景技术:
2.城市中的各种地下管道成为了城市重要的基础设施,需要对城市管道进行定时清淤处理。城市中的各种市政下水管道,由于长期淤积泥土砂石以及各种杂物,大部分管道都会产生淤积,特别是雨水管道,不能达到预期的排水效果。在暴雨等极端天气下,容易产生城市内涝等灾害。需要通过高压水清洗或者人工疏通,不仅效果不好,还需要消耗大量人力物力,工作效率很低还很危险。
技术实现要素:
3.本实用新型的目的在于提供一种多功能管道清淤机器人,以解决现有技术中的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种多功能管道清淤机器人,包括车体,所述车体内安装有伺服电机,所述车体的两端分别安装有前车轮和后车轮,所述伺服电机通过减速机驱动后车轮,所述车体的前端安装有吸污头、带灯摄像头和多角度冲洗喷头,所述车体的后端安装有供电通讯接口、吸污管旋转快接头和下井吊钩,所述车体上安装有高压供水系统和高压供气系统,所述高压供水系统与多角度冲洗喷头连接。
5.优选的,所述前车轮和后车轮均采用橡胶驱动轮,所述前车轮的外径为120mm,后车轮的外径为200mm。
6.优选的,所述带灯摄像头包括聚光灯、摄像头和防水壳,所述防水壳将聚光灯和摄像头罩在车体上。
7.优选的,所述吸污头采用盾构型吸污头,所述吸污头由吸污口、平行刃转盘、旋切头、吸污头尾板组成,所述旋切头通过伺服电机驱动。
8.优选的,所述吸污管旋转快接头主要由管夹、2寸接管、旋转体、2/4寸接管组成,所述2寸接管通过2寸吸污管与吸污头的吸污头尾板连接,所述2/4寸接管通过旋转体与2寸接管连接。
9.优选的,所述2/4寸接管采用快接螺纹接口。
10.与现有技术相比,本实用新型的有益效果是:高压供水系统配合多角度冲洗喷头对管道内的淤泥进行全面清洗,高压供气系统保障其吸污效果,供电通讯接口与供电通讯电缆连接实现远程操控,下井吊钩保障机器人由窨井口进入管道。
附图说明
11.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
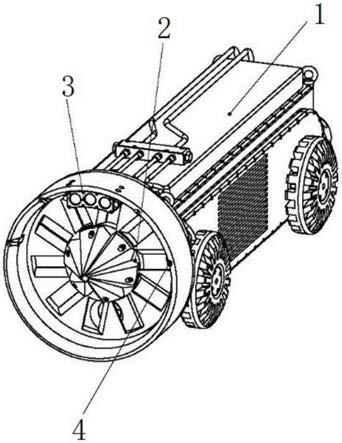
12.图1为本实用新型前部的结构示意图。
13.图2为本实用新型后部的结构示意图。
14.图中:1、车体;2、吸污头;3、带灯摄像头;4、多角度冲洗喷头;5、高压供水系统;6、高压供气系统;7、供电通讯接口;8、吸污管旋转快接头;9、下井吊钩。
具体实施方式
15.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
16.请参阅图1
‑
2,本实用新型实施例中,一种多功能管道清淤机器人,包括车体1,所述车体1内安装有伺服电机,所述车体1的两端分别安装有前车轮和后车轮,所述伺服电机通过减速机驱动后车轮,所述车体1的前端安装有吸污头2、带灯摄像头3和多角度冲洗喷头4,所述车体1的后端安装有供电通讯接口7、吸污管旋转快接头8和下井吊钩9,所述车体1上安装有高压供水系统5和高压供气系统6,所述高压供水系统5与多角度冲洗喷头4连接,所述前车轮和后车轮均采用橡胶驱动轮,所述前车轮的外径为120mm,后车轮的外径为200mm,所述带灯摄像头3包括聚光灯、摄像头和防水壳,所述防水壳将聚光灯和摄像头罩在车体上,所述吸污头2采用盾构型吸污头,所述吸污头2由吸污口、平行刃转盘、旋切头、吸污头尾板组成,所述旋切头通过伺服电机驱动,所述吸污管旋转快接头8主要由管夹、2寸接管、旋转体、2/4寸接管组成,所述2寸接管通过2寸吸污管与吸污头的吸污头尾板连接,所述2/4寸接管通过旋转体与2寸接管连接,所述2/4寸接管采用快接螺纹接口;同时采用离合器切换设计,电机可将驱动力传输给驱动轮和盾构吸污头,实现一台电机双轴输出;机器人配置了高压供水系统配合多角度冲洗喷头对管道内的淤泥进行全面清洗,高压供气系统保障其吸污效果;带灯高清摄像头的主要组成由聚光灯、摄像头、防水壳;两台聚光的输出功率为20w,可实现管道内的高清照明;配置的720p高清网络摄像头,能将管道内机器人操作视频实时传输到操控终端,辅助操作人员协同控制机器人的操作;整体式的防水壳设计,能够保证ip68级防水;盾构吸污头是为应对管道内严重淤堵状况而采用的新型设计,由吸污口、平行刃转盘、旋切头、吸污头尾板四部分构成;电机带动的旋切头会将机器人在管道内接触到的淤泥分切并导引到吸污口内,再由平行刃转盘挤压入吸污头尾板上的淤泥排出口,不断旋转的平行刃转盘还保证了吸污口不会产生淤堵;吸污管旋转快接头的结构主要由管夹、2寸接管、旋转体、2/4寸接管构成;其中2寸接管通过2寸吸污管与盾构型吸污头的吸污头尾板连接,依靠专门设计的强力管夹固定吸污管;2/4寸接管为快接螺纹接口,可切换连接智能清淤大车上的2寸和4寸吸污管;配置轴承的旋转体,保证两接头间能够自由相对旋转,确保不会因为机器人的移动而让吸污管产生多余旋转应力。
17.本实用新型的工作原理是:伺服电机通过减速机驱动后车轮,同时采用离合器切换设计,电机可将驱动力传输给驱动轮和盾构吸污头,实现一台电机双轴输出;机器人配置
了高压供水系统配合多角度冲洗喷头对管道内的淤泥进行全面清洗,高压供气系统保障其吸污效果;带灯高清摄像头的主要组成由聚光灯、摄像头、防水壳;两台聚光的输出功率为20w,可实现管道内的高清照明;配置的720p高清网络摄像头,能将管道内机器人操作视频实时传输到操控终端,辅助操作人员协同控制机器人的操作;整体式的防水壳设计,能够保证ip68级防水;盾构吸污头是为应对管道内严重淤堵状况而采用的新型设计,由吸污口、平行刃转盘、旋切头、吸污头尾板四部分构成;电机带动的旋切头会将机器人在管道内接触到的淤泥分切并导引到吸污口内,再由平行刃转盘挤压入吸污头尾板上的淤泥排出口,不断旋转的平行刃转盘还保证了吸污口不会产生淤堵;吸污管旋转快接头的结构主要由管夹、2寸接管、旋转体、2/4寸接管构成;其中2寸接管通过2寸吸污管与盾构型吸污头的吸污头尾板连接,依靠专门设计的强力管夹固定吸污管;2/4寸接管为快接螺纹接口,可切换连接智能清淤大车上的2寸和4寸吸污管;配置轴承的旋转体,保证两接头间能够自由相对旋转,确保不会因为机器人的移动而让吸污管产生多余旋转应力。
18.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1