一种大深度大负载全角度二轴水下云台
1.本发明涉及海洋装备与水下机器人技术领域,特别是涉及一种大深度大负载全角度二轴水下云台。
背景技术:
2.随着全球土地资源的不断开采和枯竭,海洋中已发现的丰富资源,下一步,海洋将是人类减轻能源危机的第一选择。与此同时,我国海岸线长达18000余公里,其中最大、最深、资源最丰富的南海地区,因此将中国建设成为“海洋强国”战略实施迫在眉睫。
3.水下云台是水下工程设备的重要组成部分,它承载着水下摄像机、水下灯、激光测距仪等,能够在水下设备的工作中实现对水下设备的一个或多个自由度的姿态调整。对于全海洋深度载人潜水器来说,搭载深海照相机的云台可以提高照相机的观察距离,是实现载人深潜器高品质水下影像的关键。根据深潜器的总体设计,增加安装平台可以减少安装摄像机的次数,降低设备的重量,降低设备的重量,节省能源。
4.国外的海洋设备工业是在20世纪50-60年代开始的,日本、挪威、俄罗斯等传统的海洋设备制造大国,南加州大学的menzies,r等人最早利用水下抓具和云台照相机取得了水下生物群体的图像;marchand,e等,2001年在victor 6000水下无人潜水器上实现了机器人手臂的控制,也就是说,机器人必须在云台上调节水下摄像机的姿态,以达到移动和跟踪的目的。在密尔沃基威斯康星大学的yingfengjil等人在2009年提出了一种解决水下照相灯光问题的解决方案,即主从云台携带水下摄像机和水下灯光,利用紊流模型建立云台的水流动力学模型,并在云台的各个自由度上建立了相应的力矩模型,并据此修正了云台的水下边界层,由此消除了由于云台伺服系统中的间断控制信号引起的抖动。
5.水下云台作为水下机器人位姿调节装置,其可使用的水下深度可以促进大深度海底探测和作业技术的发展;提高负载扭矩可以搭配更多水下作业工具,增加水下机器人的功能。随着深潜技术不断发展,传统水下云台的负载力矩小,无法搭载其他舱段和大力矩的水下作业工具。
技术实现要素:
6.本发明的目的是提供一种大深度大负载全角度二轴水下云台,以解决上述现有技术存在的问题,能够实现在大深度环境中具有两个垂直分布的旋转自由度的云台机构,其具备转动角度大,负载大的优点。
7.为实现上述目的,本发明提供了如下方案:本发明提供一种大深度大负载全角度二轴水下云台,包括:俯仰传动机构和横滚传动机构;所述俯仰传动机构和横滚传动机构均转动安装在第一密封壳体内;所述俯仰传动机构和横滚传动机构均通过减速电机驱动;所述减速电机包括步进电机和安装在所述步进电机定子轴上的行星轮减速器;所述俯仰传动机构在所述第一密封壳体内实现180度旋转;所述横滚传动机构在所述第一密封壳体内实现360度旋转。
8.所述第一密封壳体内部中空且内部空间呈为“t”字形结构;所述第一密封壳体一开口形成有安装架;所述第一密封壳体另一开口固定安装有中空圆筒。
9.所述俯仰传动机构还包括第一密封尾座,第一磁性内转子,第一轴承和第一磁性外转子;所述第一密封尾座与所述第一密封壳体的一端水密连接;一所述减速电机固定安装在所述第一密封尾座端面,且所述减速电机置于所述第一密封壳体内;所述减速电机提供旋转的驱动力带动所述第一磁性内转子在所述第一密封壳体内转动;所述第一磁性内转子通过磁耦合带动所述第一磁性外转子转动;所述第一磁性外转子通过所述第一轴承安装于所述中空圆筒外壁;所述第一磁性内转子置于所述中空圆筒内壁。
10.所述磁性外转子上焊接有一凸缘,且所述磁性外转子通过所述凸缘安装有u型架的一端。
11.所述第一密封尾座上还通过另一第一轴承安装有无磁性外转子;所述u型架的另一端安装于所述无磁性外转子上。
12.所述第一磁性外转子外还可固定安装有螺旋桨或舵机臂。
13.所述横滚传动机构还包括第二密封尾座,第二磁性内转子,第二密封壳,第二轴承和第二磁性外转子;所述第二密封尾座与第二密封壳一端水密连接;另一所述减速电机固定安装在所述第二密封尾座端面,且所述减速电机置于所述第二密封壳内;所述减速电机提供旋转的驱动力带动所述第二磁性内转子在所述第二密封尾座内转动;所述第二磁性内转子通过磁耦合带动所述第二磁性外转子转动;所述第二磁性外转子通过所述第二轴承安装于所述第二密封壳外壁;所述第二磁性外转子通过所述安装架与所述第一密封壳体转动连接。
14.所述第一轴承与第二轴承均为自润滑轴承。
15.本发明公开了以下技术效果:1.本发明将传统的旋转机械动密封的方式改为静密封并通过磁耦合进行力矩传递的方式。使水下的舵机和云台能够在大深度甚至大深度的环境下使用;
16.2.传统的模拟或数字舵机的电机输出旋转角度最多能达到270度,再经过减速器则可控制的角度范围减少。本发明使用可连续旋转的步进电机代替舵机,可以连续旋转,经过减速器的角度控制范围也可以在360度范围内任取;
17.3.传统的水下云台机构的负载力矩不高,只能调节摄像头等轻质载荷的位姿。本发明提出的云台机构配有多级减速器,能大大提高负载力矩,能够搭载大载荷的水下作业设备,多节结构auv中其它舱段。
附图说明
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
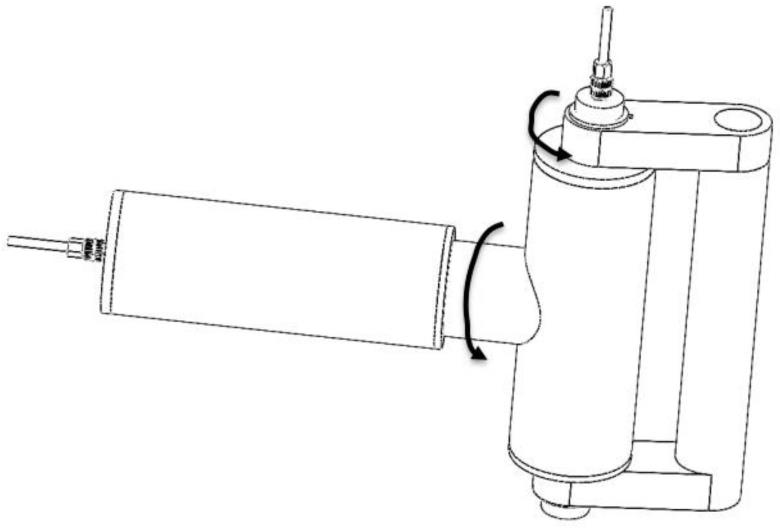
19.图1为本发明的二轴水下云台外形图;
20.图2为俯仰传动机构结构爆炸图;
21.图3为横滚传动机构结构爆炸图;
22.图4为角度控制算法仿真图;
23.图5为磁耦合力矩传递方式示意图;
24.图6为磁性内外转子径向充磁示意图;
25.图7为行星轮减速器外形图;
26.图8为一种多舱段变结构auv使用该云台的场景;
27.其中,1、无磁性外转子;2、第一密封尾座;3、减速电机;4、第一磁性内转子;5、u型架;6、第一密封壳体;7、第一轴承;8、第一磁性外转子;9、第二磁性外转子;10、中空圆筒;11、第二密封尾座;12、第二磁性内转子;13、第二密封壳;14、第二轴承。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
30.本发明提供一种大深度大负载全角度二轴水下云台,包括:俯仰传动机构和横滚传动机构;俯仰传动机构和横滚传动机构均转动安装在第一密封壳体6内;俯仰传动机构和横滚传动机构均通过减速电机3驱动;减速电机3包括步进电机和安装在步进电机定子轴上的行星轮减速器;俯仰传动机构在第一密封壳体6内实现180度旋转;横滚传动机构在第一密封壳体6内实现360度旋转。
31.在本发明的一个实施例中,对水下云台的角度控制即为对组成其关节结构的两台电机的角度控制。能够进行快速和高精度的角度控制的电机主要有步进电机和伺服电机两种。其中步进电机是开环控制角度的,其角度控制方法是控制脉冲的数量来决定旋转角度的。伺服电机是在步进电机的基础上在内部增加旋转编码器来反馈旋转的角度,是闭环控制。伺服电机在控制精度上较步进电机高。但是在结构上需要给旋转编码器提供额外的空间。考虑到水下环境的苛刻性,需要尽量减小关节机构的尺寸。故使用步进电机。步进电机在额定功率下可以精准控制旋转角度,水下云台也不需要较大的角度精度。相比于伺服电机,使用步进电机不必在内部增加编码器,减少电机尺寸。在控制方法上,伺服电机需要进行闭环控制,其控制器体积较大。步进电机只需发脉冲进行控制,控制器体积小,也可以与其它控制器集成。
32.进一步的,电动机是典型的旋转设备,在电机转轴旋转时总会造成缝隙,使水渗入到电机内部,旋转装置的动密封在原理上就无法保证零渗漏,而且在大深度海洋环境中,受水压的影响会加快海水渗入。因此,旋转动密封的方法难以应用于大深度海洋环境中。目前,静态的耐压舱和深水电缆接口能够做到大深度。因此,可以考虑将电机完全放到耐压套壳中,电机伸出轴搭载内转子,内转子表面分布磁力阵列,耐压套壳外再搭载外转子,外转子内部同样分布磁力阵列。内、外转子的磁力阵列组成磁耦合联轴器或磁力轮实现角度的传动。提供旋转电机被套在耐压的密封套壳内,伸出轴上安装具有磁力阵列的内转子,在套壳外安装具有磁力阵列的外转子。磁耦合联轴器不要求两个轴接触,也减少了摩擦。
33.更进一步的,使用齿轮减速器对电动机等旋转执行机构提升扭矩是常用的方法,同为角度执行零件的舵机结构就是使用齿轮减速器提高扭矩的。但是齿轮减速器往往会将旋转的输出轴和电机的转子偏置一定角度,在径向增加体积,同时减速器和电机整体的质心也偏离输出轴。为减少径向尺寸和整体质心偏置的问题,考虑使用行星轮减少传动比,提高转矩。
34.在本技术的一个实施例中如图7所示,行星轮减速器具体为3级行星轮减速器结构;该结构将步进电机电机定子轴中心与输出轴中心对齐,在轴向上增加尺寸,整体质心保持在定子轴轴线上;经过多级的减速,虽然减少了旋转速度和每步的输出角度,但是提高了可应用的负载转矩。
35.第一密封壳体6内部中空且内部空间呈为“t”字形结构;第一密封壳体6一开口形成有安装架;第一密封壳体6另一开口固定安装有中空圆筒10。
36.俯仰传动机构还包括第一密封尾座2,第一磁性内转子4,第一轴承7和第一磁性外转子8;第一密封尾座2与第一密封壳体6的一端水密连接;一减速电机3固定安装在第一密封尾座2端面,且减速电机3置于第一密封壳体6内;减速电机3提供旋转的驱动力带动第一磁性内转子4在第一密封壳体6内转动;第一磁性内转子4通过磁耦合带动第一磁性外转子8转动;第一磁性外转子8通过第一轴承7安装于中空圆筒10外壁;第一磁性内转子4置于中空圆筒10内壁。
37.第一磁性外转子8上焊接有一凸缘,且第一磁性外转子8通过凸缘安装有u型架5的一端。
38.第一密封尾座2上还通过另一第一轴承7安装有无磁性外转子1;u型架5的另一端安装于无磁性外转子1上。
39.在本发明的一个实施例中,如图2所示,第一密封尾座2和第一密封壳体6通过水密螺纹连接组成静密封壳。减速电机3通过螺纹连接固定在第一密封尾座2上,减速电机3提供旋转的驱动力带动第一磁性内转子4旋转;第一磁性内转子4通过磁耦合带动第一磁性外转子8进行旋转;第一磁性外转子8焊接一块凸缘用于与u型架5相连,第一磁性外转子8旋转时带动u型架5进行旋转。第一轴承7起到支撑第一磁性外转子8的作用;整个磁耦合传动的方式可总结为减速电机3-第一磁性内转子4-第一磁性外转子8-u型架5。
40.第一磁性外转子8外还可固定安装有螺旋桨或舵机臂。
41.在本发明的一个实施例中,如图5所示,减速电机3的伸出端通过键连接或螺钉连接的方式与第一磁性内转子4或第二磁性内转子12固定连接,进而带动第一磁性内转子4或第二磁性内转子12转动,第一磁性外转子8或第二磁性外转子9由自润滑轴承进行支撑;但仅第一磁性外转子8外部可固定连接螺旋桨、u型架、舵机臂等部件。
42.横滚传动机构还包括第二密封尾座11,第二磁性内转子12,第二密封壳13,第二轴承14和第二磁性外转子9;第二密封尾座11与第二密封壳13一端水密连接;另一减速电机3固定安装在第二密封尾座11端面,且减速电机3置于第二密封壳13内;减速电机3提供旋转的驱动力带动第二磁性内转子12在第二密封尾座11内转动;第二磁性内转子12通过磁耦合带动第二磁性外转子9转动;第二磁性外转子9通过第二轴承14安装于第二密封壳13外壁;第二磁性外转子9通过安装架与第一密封壳体6转动连接。
43.在本发明的一个实施例中,如图3所示,横滚传动机构的磁耦合原理与俯仰传动机
构相同;但由于横滚传动机构无需给u型架5这种双臂结构传递力矩,因此无需两端都配置支撑结构,因此没有无磁性外转子1,只驱动第一密封壳体6旋转。
44.第一轴承7与第二轴承14均为自润滑轴承。
45.在本发明的一个实施例中,磁性内外转子的充磁方式如图6所示,图中箭头方向表示磁场方向。由于钕磁铁异性相吸,同性相斥的特性。只有将内外转子进行径向充磁才能在周向上传递旋转的动力。当磁性内转子旋转时,磁性内转子的外表面某点为s极,那么与该点同一直径方向上的磁性外转子内表面为n极。假使磁性外转子的内表面同为s极,那么它将受到该直径线上磁性内转子外表面的斥力和非直径线上外表面的吸力。此分布形式受到磁铁的吸力和斥力的同时作用,将内外转子的磁性始终保持在这一分布形式下。由此完成了轴向旋转动力的传递。
46.在本发明的一个实施例中,图8为本发明的一个应用场景示意图。本发明应用于多舱段变结构水下机器人上。每个舱段的重量普遍大于摄像头、水下灯等探测零部件。因此带来的负载力矩也大。由于本发明具有提升转矩的结构,因此可以使舱段相对于前一舱段进行横滚和俯仰运动旋转一定的角度。图中左边的箭头表示沿水平轴向的横滚运动,右边的箭头表示沿与水平轴和斜线轴垂直的轴的俯仰运动。
47.在本发明的一个实施例中,图4所示是无减速器的角度控制算法仿真;关节角度的控制过程可简述为,智能决策系统或操作人员输入关节需要旋转的角度(图中demand),控制器将需要旋转的角度与通过角度传感器测得的现角度进行比较,当两个角度相等时,控制器不产生pwm脉冲,步进电机不旋转。当两个角度有差值时,控制器产生pwm脉冲使步进电机旋转,直到两个角度相等;控制结构从左至右依次是控制器、驱动器、步进电机;控制器根据计算的差值产生低电平的pwm脉冲,步进电机驱动器在低电平的脉冲作用下产生大电压和大电流的驱动力驱动最右边的步进电机。
48.进一步的,旋转角度的驱动使用步进电机,步进电机所旋转的角度取决于接受的脉冲数,同时步进电机又可以进行连续旋转,因此,即使有减速机构减小每一步旋转的角度,但由于可连续旋转,最终可输出0~360度范围内的旋转角度。
49.在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
50.以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1