智能电磁阀控制系统及方法与流程
本技术涉及电磁阀的智能控制领域,且更为具体地,涉及一种智能电磁阀控制系统及方法。
背景技术:
1、电磁阀在工作过程中需要产生足够的电磁力来吸合衔铁,并给予一定的加速度,以确保阀门的正常开启。然而,一旦衔铁完全吸合,继续维持较大的电流会导致功率浪费和线圈发热问题。因此,需要实时调整电磁阀的工作电流,以保持在适当的范围内。
2、为了调节电磁阀的工作电流,一种常见的方法是通过调节电压来实现。这种方法可以避免使用可调电阻来改变电路总电阻,从而减少额外的功率损耗。另外一种方法是改变电源电压的大小,来调节电路电流的大小。然而,这种方法操作复杂,可靠性较低。
3、因此,期待一种智能电磁阀控制系统及方法,基于深度学习技术实时监测电磁阀的工作状态,以实现对工作电流的自动化控制,进而提高电磁阀工作的效率和可靠性。
技术实现思路
1、为了解决上述技术问题,提出了本技术。本技术的实施例提供了一种智能电磁阀控制系统及方法,其首先采集待监测电磁阀的多个预定时间点的电流值、待监测电磁阀的多个预定时间点的温度值、以及待监测电磁阀的多个预定时间点的衔铁位置,接着通过深度学习技术对这些数据进行深度卷积编码以得到电磁阀电流-温度特征矩阵和电磁阀衔铁位置输入向量,然后结合所述电磁阀电流-温度特征矩阵和所述电磁阀衔铁位置输入向量以得到用于表示待监测电磁阀的工作电流增大或减小的分类结果。这样,通过分类结果,能够及时发现电磁阀工作过程中的电流值是否有异常情况,并及时进行控制和调整。这样,有助于提高电磁阀工作的效率和可靠性。
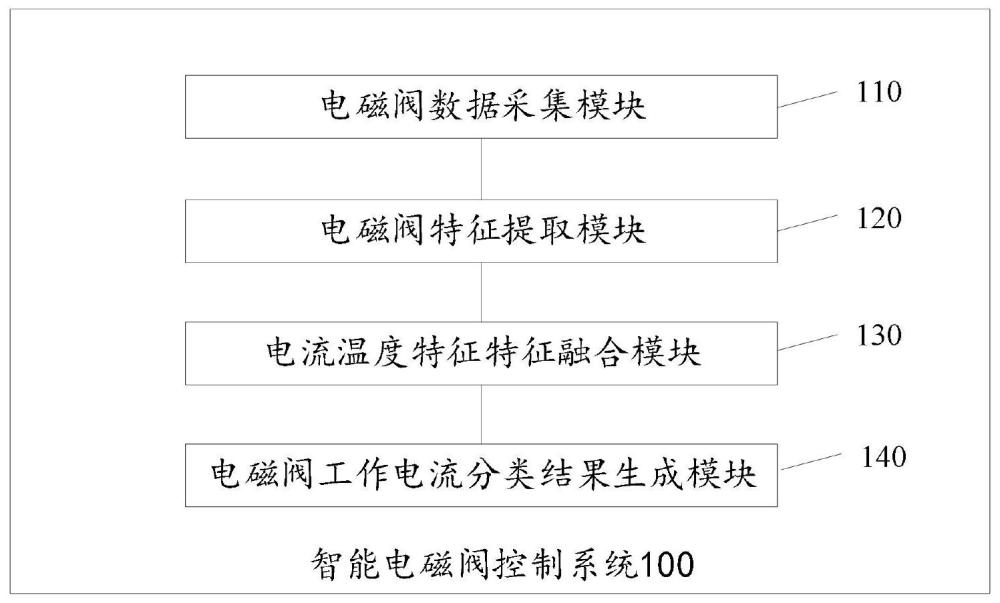
2、根据本技术的第一方面,提供了一种智能电磁阀控制系统,其包括:
3、电磁阀数据采集模块,用于采集待监测电磁阀的多个预定时间点的电流值、待监测电磁阀的多个预定时间点的温度值、以及待监测电磁阀的多个预定时间点的衔铁位置;
4、电磁阀特征提取模块,用于对所述待监测电磁阀的多个预定时间点的电流值、所述待监测电磁阀的多个预定时间点的温度值、以及所述待监测电磁阀的多个预定时间点的衔铁位置分别进行特征提取和分析以得到电磁阀电流-温度特征矩阵以及电磁阀衔铁位置输入向量;
5、电流温度特征特征融合模块,用于将所述电磁阀电流-温度特征矩阵以及所述电磁阀衔铁位置输入向量进行特征融合以得到电磁阀工作状态特征向量;
6、电磁阀工作电流分类结果生成模块,用于基于所述电磁阀工作状态特征向量,以得到用于表示待监测电磁阀的工作电流增大或减小的分类结果。
7、结合本技术的第一方面,在本技术的第一方面的一种智能电磁阀控制系统中,所述电磁阀特征提取模块,包括:电磁阀电流特征获取单元,用于将所述待监测电磁阀的多个预定时间点的电流值通过基于时序编码器的温度时序特征提取模块以得到电磁阀电流特征向量;电磁阀温度特征获取单元,用于对所述待监测电磁阀的多个预定时间点的温度值进行深度卷积编码以得到电磁阀温度特征向量;特征联合单元,用于使用联合编码器将所述电磁阀电流特征向量和所述电磁阀温度特征向量进行特征联合以得到所述电磁阀电流-温度特征矩阵;电磁阀衔铁位置特征获取单元,用于对所述待监测电磁阀的多个预定时间点的衔铁位置进行深度卷积编码以得到所述电磁阀衔铁位置输入向量。
8、其中,所述电磁阀温度特征获取单元,包括:温度数据排列子单元,用于将所述待监测电磁阀的多个预定时间点的温度值按时间维度排列为电磁阀温度输入向量;温度特征捕获子单元,用于将所述电磁阀温度输入向量通过具有多尺度卷积结构的温度特征提取模块以得到电磁阀温度特征向量。
9、其中,所述特征联合单元,用于:使用所述联合编码器以如下公式对所述电磁阀电流特征向量和所述电磁阀温度特征向量进行联合编码以生成所述电磁阀电流-温度特征矩阵;其中,所述公式为:其中表示向量相乘,ma表示所述电磁阀电流-温度特征矩阵,va1表示所述电磁阀电流特征向量,va2表示所述电磁阀温度特征向量,表示所述电磁阀温度特征向量的转置。
10、其中,所述电磁阀衔铁位置特征获取单元,包括:衔铁位置数据排列子单元,用于将所述待监测电磁阀的多个预定时间点的衔铁位置按时间维度排列为电磁阀衔铁位置输入向量;衔铁位置特征捕获子单元,用于将所述电磁阀衔铁位置输入向量通过多尺度衔铁位置特征提取模块以得到所述电磁阀衔铁位置输入向量。所述衔铁位置特征捕获子单元,用于:使用所述多尺度衔铁位置特征提取模块的第一卷积层对所述电磁阀衔铁位置输入向量进行一维卷积编码以得到第一尺度特征向量;使用所述多尺度衔铁位置特征提取模块的第二卷积层对所述电磁阀衔铁位置输入向量进行一维卷积编码以得到第二尺度特征向量;以及将所述第一尺度特征向量和所述第二尺度特征向量进行级联以得到所述电磁阀衔铁位置输入向量。
11、根据本技术的第二方面,提供了一种智能电磁阀控制方法,其包括:
12、采集待监测电磁阀的多个预定时间点的电流值、待监测电磁阀的多个预定时间点的温度值、以及待监测电磁阀的多个预定时间点的衔铁位置;
13、对所述待监测电磁阀的多个预定时间点的电流值、所述待监测电磁阀的多个预定时间点的温度值、以及所述待监测电磁阀的多个预定时间点的衔铁位置分别进行特征提取和分析以得到电磁阀电流-温度特征矩阵以及电磁阀衔铁位置输入向量;
14、将所述电磁阀电流-温度特征矩阵以及所述电磁阀衔铁位置输入向量进行特征融合以得到电磁阀工作状态特征向量;
15、基于所述电磁阀工作状态特征向量,以得到用于表示待监测电磁阀的工作电流增大或减小的分类结果。
16、结合本技术的第二方面,在本技术的第二方面的一种智能电磁阀控制方法中,基于所述电磁阀工作状态特征向量,以得到用于表示待监测电磁阀的工作电流增大或减小的分类结果,包括:电磁阀工作特征获取单元,用于将所述电磁阀工作状态特征向量通过基于卷积神经网络模型的电磁阀工作特征提取模块以得到电磁阀工作电流分类特征向量;电磁阀工作特征优化单元,用于对所述电磁阀工作电流分类特征向量进行概率密度域维度衍生单调性投影以得到优化电磁阀工作电流分类特征向量;电磁阀工作特征分类单元,用于将所述优化电磁阀工作电流分类特征向量通过分类器以得到用于表示待监测电磁阀的工作电流增大或减小的分类结果。
17、其中,所述所述电磁阀工作特征优化单元,用于:以如下公式对所述电磁阀工作电流分类特征向量进行概率密度域维度衍生单调性投影以得到优化电磁阀工作电流分类特征向量;其中,所述公式为:
18、
19、其中,fi和fj分别表示所述电磁阀工作电流分类特征向量的第i个和第j个位置的特征值,表示所述电磁阀工作电流分类特征向量的全部特征值的均值,n表示所述电磁阀工作电流分类特征向量的长度,f'i表示所述优化电磁阀工作电流分类特征向量的第i个位置的特征值。
20、其中,所述电磁阀工作特征分类单元,用于:使用所述分类器以如下公式对所述电磁阀工作电流分类特征向量进行处理以得到所述分类结果;其中,所述公式为:o=softmax{(wn,bn):…:(w1,b1)|v},其中,w1到wn为权重矩阵,b1到bn为偏置向量,v为电磁阀工作电流分类特征向量,softmax表示归一化指数函数,o表示所述分类结果。
21、与现有技术相比,本技术提供的一种智能电磁阀控制系统及方法,其首先采集待监测电磁阀的多个预定时间点的电流值、待监测电磁阀的多个预定时间点的温度值、以及待监测电磁阀的多个预定时间点的衔铁位置,接着通过深度学习技术对这些数据进行深度卷积编码以得到电磁阀电流-温度特征矩阵和电磁阀衔铁位置输入向量,然后结合所述电磁阀电流-温度特征矩阵和所述电磁阀衔铁位置输入向量以得到用于表示待监测电磁阀的工作电流增大或减小的分类结果。这样,通过分类结果,能够及时发现电磁阀工作过程中的电流值是否有异常情况,并及时进行控制和调整。这样,有助于提高电磁阀工作的效率和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!