一种基于互谱信息的漏水定位方法与流程
1.本发明属于漏水定位技术领域,具体涉及一种基于互谱信息的漏水定位方法。
背景技术:
2.现有检测漏水的方法均是通过对漏水声的声源定位来判断漏水位置,由于管道漏水声音的传播速度与漏水点距离无关,声波从漏点传播到两个探头存在时间差,因此可以通过多个声音采集点的时延差进行定位解算,结合两个探头之间的管道长度、声波传播速度,即可间接求得漏水声的声源位置。目前一般采用两个振动传感器探头通过磁性座吸附在消防栓、阀门等管道的暴露点上,然后采集漏水声从而计算时延。
3.但是管道中存在持续及偶发性的噪音,噪音声波会干扰漏水声的定位解算,使漏水点定位出现偏差,因此需要一种能够减少噪声影响的漏水定位方法。
技术实现要素:
4.基于现有技术中存在的上述缺点和不足,本发明的目的之一是至少解决现有技术中存在的上述问题之一或多个,换言之,本发明的目的之一是提供满足前述需求之一或多个的一种基于互谱信息的漏水定位方法。
5.为了达到上述发明目的,本发明采用以下技术方案:
6.一种基于互谱信息的漏水定位方法,包括如下步骤:
7.s1、在两个不同位置采集声信号,分别得到第一接收信号和第二接收信号;
8.s2、对第一接收信号和第二接收信号时频变换,得到第一接收信号和第二接收信号的频段数据;
9.s3、根据第一接收信号和第二接收信号的频段数据计算相干函数值,挑选相干函数值的若干个极大值,根据若干个极大值将第一接收信号和第二接收信号的频段数据分为若干频段;
10.s4、计算第一接收信号和第二接收信号在每个频段的互功率谱、互相位谱;
11.s5、使用专家系统根据互功率谱、互相位谱和相干函数值表决选定第一接收信号和第二接收信号中的漏水声频段;
12.s6、根据第一接收信号和第二接收信号中的漏水声频段计算漏水声的声源位置。
13.作为优选方案,步骤s6具体包括如下步骤:
14.s61、根据漏水声频段设置截止频率,滤波第一接收信号和第二接收信号,得到第一漏水声信号和第二漏水声信号;
15.s62、对第一漏水声信号和第二漏水声信号快速傅里叶变换并相乘,得到漏水声信号的互相关函数;
16.s63、根据互相关函数计算第一漏水声信号和第二漏水声信号的时延。
17.作为进一步优选的方案,步骤s62之后、s63之前还包括步骤s621:
18.对互相关函数以相位变换加权函数进行加权,使其更加平滑。
19.作为进一步优选的方案,步骤s6具体包括如下步骤:
20.s61、根据漏水声频段设置截止频率,滤波第一接收信号和第二接收信号,得到第一漏水声信号和第二漏水声信号;
21.s611、对第一漏水声信号和第二漏水声信号以滑动窗分段,得到若干第一漏水声信号段和第二漏水声信号段;
22.s62、选中一个分段中对应的第一漏水声信号段和第二漏水声信号段,对第一漏水声信号段和第二漏水声信号段快速傅里叶变换并相乘,得到漏水声信号段的互相关函数;
23.s63、根据互相关函数计算第一漏水声信号段和第二漏水声信号段的时延;
24.s64、返回步骤s62,选中另一个分段,全部分段均被选中过以后得到若干个时延,进入步骤s65;
25.s65、对若干个时延分类,得到时延的最优值。
26.作为进一步优选的方案,步骤s65具体包括:
27.s651、使用dbscan聚类算法对若干个时延聚类;
28.s652、选中最大集合类,计算最大集合类中全部时延的算术平均值作为时延的最优值。
29.作为优选方案,步骤s4具体包括如下步骤:
30.s41、利用welch平均周期图法计算第一接收信号和第二接收信号的互相位谱,计算每个频段中互相位谱的相位变化线性度;
31.s42、提取每个频段中相干函数的上下限值、幅度、宽度;
32.s43、计算第一接收信号和第二接收信号的互功率谱,并提取互功率谱在每个频段中心处的谱峰。
33.作为进一步优选的方案,专家系统根据每个频段的相位变化线性度、相干函数的上下限值、幅度、宽度和中心处的谱峰表决选定漏水声频段。
34.本发明与现有技术相比,有益效果是:
35.本发明的方法,通过提取多段频段对应的互功率谱、相干函数的幅度、宽度作为特征量、结合互相位谱对应频段的相位变化线性度特征,利用专家表决模型对各个频段进行评分,以评分的高低选择挑选漏水声的最优频段,从而排除噪声干扰,用最有利于漏水定位的频段进行定位解算;
36.对多个定位结果进行分类聚合,排除异常值对最终位置计算的影响,进一步提高漏水定位的精度。
附图说明
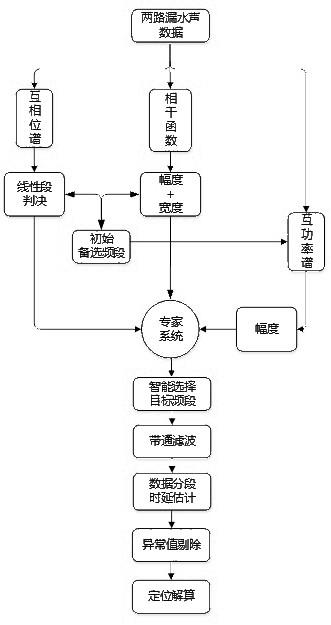
37.图1是本发明实施例的一种基于互谱信息的漏水定位方法的流程图;
38.图2是本发明实施例的互相位谱图;
39.图3是本发明实施例的互相位谱图的横向分布示意图;
40.图4是本发明实施例的广义互相关函数的计算流程图。
具体实施方式
41.为了更清楚地说明本发明实施例,下面将对照附图说明本发明的具体实施方式。
显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
42.实施例:本实施例提供一种基于互谱信息的漏水定位方法,其流程图如图 1所示,方法具体包括如下步骤:
43.首先是步骤s1、以振动传感器探头作为采集设备,将两个探头分别贴靠在同一个管道中不同位置的管道暴露点上,以在两个不同的位置采集到的管道中的声信号,由第一振动传感器探头和第二振动传感器探头采集到的声信号分别命名为第一接收信号和第二接收信号。
44.由于两个探头采集的声信号中都包含有噪声,因此保证漏点定位准确性的关键是正确选择漏水声对应频段,排除无关频段的干扰。故在采集信号后进入步骤s2、对第一接收信号和第二接收信号进行时频变换,得到第一接收信号和第二接收信号以频率作为横坐标的频段数据。
45.然后通过步骤s3将频段根据两个信号之间的相干性挑选初始的漏水声频段,根据第一接收信号和第二接收信号的频段数据计算相干函数值。
46.具体的,相干函数值的计算使用如下方法:
47.设第一接收信号和第二接收信号分别为x(n)和y(n),使用welch平均周期图法进行谱估计,将x(n)和y(n)都分为k段,每段之间的重叠率为50%。然后在每个片段上添加一个hamming窗,在对各段数据作快速傅立叶变换得到每段数据的互谱(xi(f)y
i*
(f)),最后再计算两个信号的互功率谱估计值:
[0048][0049]
其中,*表示复共轭,g
xx
(f)是源信号的自功率谱,由于两个接收信号都包含漏水声信号,因此在互功率谱上的反映就是在共性频段上形成的具有一定宽度的谱峰。
[0050]
如上公式所示,x(n)和y(n)之间存在一个时延差τo,且与互相位谱存在如下关系:
[0051]
θ
xy
(f)=2πfτo;
[0052]
计算θ
xy
(f)时,可由双边谱g
xy
(f)转变为单边谱s
xy
(f),即
[0053]sxy
(f)=i
xy
(f)+jq
xy
(f)。
[0054]
使用相似过程还可以计算得到两路信号的单边谱s
xx
(f)和s
yy
(f),在得到两路信号的单边谱以后,相干函数由以下公式计算得到:
[0055][0056]
该相关函数表征了两路信号在频域上的相关度,如果如果两个信号中包含都存在漏水声,则在相应频段的相干函数值越大,因此根据其幅值估计出漏水信号所在的频段。
[0057]
相干函数纵轴是0~1之间的数值,横轴是频率;理论上如果x(n)和y(n) 为纯漏水声信号,则γ
2xy
(f)=1,即强相关度;如果x(n)和y(n)完全不相关,即都不包含漏水声信号或漏水声极其微弱设备无法感知,则γ
2xy
(f)=0;如果 x(n)和y(n)即包含漏水声信号,也存在环境噪声,则0<γ
2xy
(f)<1,并且相关函数呈现一定宽度的谱峰。
[0058]
由于相干函数越大则说明相关度越高,因此在相干函数中选取幅度最大的前n个
极大值,以这些极大值所在的频率为分隔点分隔频段,从而得到多个相干函数最大的频段。
[0059]
频段分隔完成后进行步骤s4以计算各个频段判断漏水声信号的评分因子,评分因子包括各频段中互功率谱、互相位谱和相干函数的值或特征值,在此处,步骤s4分别以三个部分分别计算互相位谱、相干函数特征值及互功率谱。其中首先进行步骤s41、计算s3分隔出的每个频段中互相位谱的相位变化线性度,其线性度以如下方法计算:
[0060]
先计算信号的互相位谱,在上述公式的基础上,以i
xy
(f)和jq
xy
(f)分别为互谱的实部与虚部,则互相位谱:
[0061][0062]
由于在一定的信噪比下,θ
xy
(f)如图2所示,随频率呈近似线性变化,且斜率为2πτo,因此互谱相位谱θ
xy
(f)能够表征两个信号之间相位关系随频率变化的相关性,并且该变化趋势不会随时间而改变。而信号中其它噪声对应频段的相位谱会随时间变化而有明显的差异。因此可通过比较不同频段的互相位谱的相位是否呈线性变化且趋势一致,判断该频段是否为漏水声频段。若相位如图2中框选的目标频段所示呈线性变化,则是漏水声频段的概率较大,而其它噪声之间没有固定的相位关系,在这些噪声的频带中相位变化没有稳定的变化趋势。
[0063]
基于上述理由,互相位谱的线性度可以作为漏水声评分的条件,得到互相位谱后,对互相位谱进行梯度计算,即将原互相位谱的如图2所示的斜向分布转化为如图3所示的横向分布,以各频段内的起伏程度即标准差,表征该频段中相位曲线的线性度。计算完成后,将各个频段的线性度保存留作后续漏水声频段的评分条件之一。
[0064]
步骤s4还包括步骤s42、在步骤s3根据相干函数的极大值分隔得到各个频段的基础上,提取各个频段中相干函数的上下限值、幅度和宽度,同样留作各频段的评分条件。
[0065]
另外,还包括步骤s43、使用上述步骤s3中计算得到的互功率谱g
xy
(f),将互功率谱g
xy
(f)同样按照上述频段的分隔分为若干段,然后提取各个频段的中心频率对应的谱峰值,将其保存作为各频段的评分条件。
[0066]
完成评分条件的计算后进行步骤s5、使用专家系统根据上述步骤s4中计算的互相位谱线性度、相干函数幅度、宽度、互功率谱的中心谱峰值作为评分特征值,生成各个频段的总分值表,选择分值最高的频段、即最符合漏水声特征的频段作为漏水声频段。其中专家系统的评估算法模型根据已有数据及案例。
[0067]
选取漏水声频段后,则可进行步骤s6、根据第一接收信号和第二接收信号中的漏水声频段计算漏水声的声源位置。
[0068]
具体的,步骤s6以如下过程实现:
[0069]
s61、使用漏水声频段对第一接收信号和第二接收信号进行带通滤波,仅保留属于漏水声频段的信号,得到第一漏水声信号和第二漏水声信号。
[0070]
s62、求第一漏水声信号和第二漏水声信号的互相关函数,由于按照时域卷积方式求互相关函数的方法计算量较大,根据时域卷积即为频域乘积的定理,此处将漏水声信号转化到频域进行操作。即分别对x(n)、y(n-m)进行快速傅里叶变换,得到x(ω)、y(ω),因此第一漏水声信号和第二漏水声信号的互相关函数的频域r
xy
(m)等于x(ω)y
*
(ω)。
[0071]
进一步的,由于存在混响和噪声影响,可能会导致r
xy
(m)的峰值不明显,降低时延
估计精度;为了锐化r
xy
(m)的峰值,让互相关函数更加平滑,从而一直噪声和混响干扰,在步骤s62之后还包括步骤s621、在频域内对互功率谱使用相位变换加权函数-phat权函数进行加权,以一个白化滤波器的作用使信号间的互功率谱更加平滑,从而锐化广义互相关函数。
[0072]
上述操作以如图4所示的流程进行,最终得到的具体公式如下:
[0073][0074]
其中即为相位变换加权函数,
[0075]
然后使用上述广义互相关函数r
xy
(m)计算第一漏水声信号和第二漏水声信号之间的时延。在原始的信号x(n)、y(n-m)中,m即为时延,y(n-m)代表第二漏水声信号进行时间移位,然后当广义互相关函数得到最大值时即代表移位后的第二漏水声信号与第一漏水声信号对齐达到最大相似处。因此广义互相关函数求得最大值时的m值即为第一漏水声信号和第二漏水声信号之间的时延。
[0076]
求得时延后进行步骤s64、结合探头之间管道长度d、声波传播速度v和时延τ,计算漏点与两个探头的距离。
[0077]
具体的,漏点距离两个探头的距离计算公式分别为:
[0078]
l1=(d-v.τ)/2 l2=d-l1。
[0079]
虽然前述步骤已经进行了频段滤波,但上述步骤s61-s64所计算得到的时延仍会受到噪声的干扰。作为一种改进方案,为了进一步提高位置计算的精度,本实施例还提供另一种步骤s6的具体实现方式,将步骤s6以如下步骤实施:
[0080]
在与上述相同的步骤s61之后,额外执行步骤s611、将第一漏水声信号和第二漏水声信号以指定宽度的滑动窗形式进行分段,各段之间重叠率50%。从而在每一段上分别计算时延,并在最终统合各段的时延结果并剔除其中的异常值。
[0081]
步骤s611之后,选中其中一段,执行上述步骤s62-s63,计算得到该段的时延。执行完步骤s63后,在步骤s64中选中一个未被计算过的分段,返回步骤s62,重新得到一个分段的时延,直到所有分段的时延均被计算得出。
[0082]
然后执行步骤s65、统计全部时延,并对其进行分类,剔除其中的异常值,得到时延的最优值以优化声源位置计算。
[0083]
具体的,步骤s65可以使用dbscan聚类算法选定合适的时延聚类,具体以如下方法实现:
[0084]
s651、首先设定邻域距离阈值eps,和样本点要成为核心对象要求的样本数阈值min_samples。任意选取一个时延的点,找到这个点距离小于等于eps 的所有店,如果距起始点的距离在eps之内的时延点个数小于min_samples,那么这个点被标记为噪声。如果距离在eps之内的时延点个数大于 min_samples,则这个点被标记为核心样本,并被分配一个新的簇标签。
[0085]
访问核心样本所有距离eps内的时延点,如果它们还没有被分配一个簇,则将刚刚创建的新的簇标签分配给它们。如果它们是核心样本,那么就依次访问其邻居,以此类推;簇逐渐增大,直到在簇的eps距离内没有更多的核心样本为止。
[0086]
然后选取另一个尚未被访问过的时延点,重复相同过程,直到所有点都处于某一簇中。
[0087]
通过上述dbscan算法,将具有足够密度的区域划分为簇,并在具有噪声的空间数据集中发现任意形状的簇,将簇定义为密度相连的点的最大集合,将分离出的高密度区域作为一个独立类,将低密度区数据作为异常值。
[0088]
在步骤s651完成全部时延结果的聚类以后,执行步骤s652、选中其中最大的一个聚类,将该聚类作为最优的时延聚类,而其他聚类中的时延为异常值。
[0089]
将最大聚类中的全部时延取算数平均值,得到时延的最优值。
[0090]
然后使用时延的最优值进行步骤s66、使用时延的最优值计算漏水点与两个探头的距离,从而确定漏水声的声源位置。
[0091]
本实施例的方法从两路漏水信号的相关特性出发,以相干函数的幅度、宽度值为基础选择初始漏水声频段,结合互功率谱峰值以及互谱相位变化的线性度,采用专家表决算法选择目标滤波频段,然后以带通滤波形式提高信号信噪比。在时延估计的过程中,采用数据分段计算时延,使用dbscan聚类算法排除因环境影响出现的异常时延值,从而进一步提高漏水点定位精度。由此在自适应选择滤波频段的基础上实现了高精度漏水相关定位。
[0092]
应当说明的是,上述实施例仅是对本发明的优选实施例及原理进行了详细说明,对本领域的普通技术人员而言,依据本发明提供的思想,在具体实施方式上会有改变之处,而这些改变也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1